על פי הנתונים שנחשפו על ידי הערכות הבריאות העולמיות בשנת 2016, פציעה בתנועה היא הגורם השמיני למקרי מוות עולמיים, מה שמוביל ל -1.4 מיליון מקרי מוות ברחבי העולם1. בשנת 2018, 39.2% מתאונות הדרכים היו התנגשויות עם כלי רכב מנועיים בתחבורה, ו-7.2% מהן היו התנגשויות עורפיות. פתרון להגברת הבטיחות ברכב ובכביש הוא פיתוח מערכת סיוע מתקדמת לנהיגה (ADAS) כדי להזהיר נהגים מפני סכנות פוטנציאליות. נתונים הראו כי ADAS יכול להפחית באופן משמעותי את קצב ההתנגשויות העורפיות, והוא יעיל עוד יותר כאשר מצויד במערכת בלמים אוטומטית2. בנוסף, עם פיתוח כלי רכב אוטונומיים, תידרש מעורבות אנושית פחותה לשליטה ברכב, מה שהופך את מערכת ההתרעה על בקשת השתלטות (TOR) לצורך כאשר הרכב האוטונומי אינו מצליח לווסת את עצמו. העיצוב של מערכת ההתרעה ADAS ו TOR הוא עכשיו פיסת טכנולוגיה חשובה עבור נהגים כדי למנוע תאונות קרובות בתוך כמה שניות. הניסוי המופתי השתמש בארגז כלים רוטט יחד עם פלטפורמת סימולציית נהיגה כדי לחקור איזה מיקום יפיק את התוצאה הטובה ביותר כאשר מערכת התרעה vibrotactile שימשה כמערכת התראה פוטנציאלית ADAS ו TOR.
מסווגים לפי ערוצים תפיסתיים, קיימים בדרך כלל שלושה סוגים של אופני אזהרה, כלומר חזותיים, שמיעתיים ומישושיים. לכל מודאליות אזהרה יש יתרונות ומגבלות משלה. כאשר מערכות התראה חזותית נמצאות בשימוש, נהגים עלולים לסבול מעומס ראייה3, פגיעה בהופעות הנהיגה עקב עיוורון לא קשוב4,5. למרות שמערכת התרעה שמיעתית אינה משפיעה על שדה הראייה של הנהגים, יעילותה תלויה מאוד בסביבה כגון מוזיקת רקע ורעשים אחרים בסביבת הנהיגה6,7. לכן, מצבים המכילים מידע שמיעתי חיצוני אחר או רעש משמעותי עלול להוביל חירשות קשובה8,9, הפחתת האפקטיביות של מערכת אזהרה שמיעתית. לשם השוואה, מערכות התרעה מישוש אינן מתחרות בעיבוד החזותי או השמיעתי של הנהגים. על ידי שליחת אזהרות vibrotactile לנהגים, מערכות אזהרה מישוש להתגבר על המגבלות של מערכות התראה חזותית ושמיעתית.
מחקרים קודמים הראו כי אזהרות מישוש יכול להועיל לנהגים על ידי קיצור זמן תגובת הבלמים שלהם. כמו כן נמצא כי מערכות התרעה מישוש להניב תוצאה יעילה יותר על חזותי10,11 ו שמיעתי12,13,14 מערכות אזהרה במצבים מסוימים. עם זאת, מחקר מוגבל התמקד בחקירת המיקום האופטימלי להצבת התקן אזהרה מישוש. על פי השערת קליפת המוח החושית15 והשערת המרחק החושי16, המחקר המופתי בחר באזורי האצבע, פרק כף היד והמקדש כמיקומים ניסיוניים להצבת מכשיר אזהרה מישוש. עם הפרוטוקול שהוצג, ניתן להגדיר את התדירות ואת זמן מתן הזמן של אזהרה רוטטת, ומרווחים בין תנודות של ערכת הכלים רוטט, כדי להתאים לדרישות הניסוי. ערכת כלים רוטטת זו כללה שבב ראשי, שבב וסת מתח, מולטיפלקסר, מתאם USB לטרנזיסטור-טרנזיסטור-לוגיקה (TTL), טרנזיסטור אפקט שדה (MOSFET) של תחמוצת מתכת ומודול Bluetooth. מספר המודולים הרוטטים יכול להשתנות גם בהתאם לצורכי החוקרים, כאשר עד ארבעה מודולים רוטטים בו זמנית. בעת יישום ערכת הכלים רוטט בניסויים הקשורים לנהיגה, זה יכול להיות מוגדר כדי להתאים את ההגדרות הניסיוניות, כמו גם מסונכרן עם נתוני ביצועים נהיגה על ידי שינוי הקודים של סימולציית הנהיגה.
בעוד עבור חוקרים, ביצוע ניסוי נהיגה בפלטפורמה וירטואלית הוא ריאלי יותר מאשר בעולם האמיתי בשל הסיכון והעלות הכרוכים בכך. לדוגמה, איסוף מדדי ביצועים יכול להיות קשה, וקשה לשלוט בגורמים הסביבתיים המעורבים כאשר ניסויים נערכים בעולם האמיתי. כתוצאה מכך, מחקרים רבים השתמשו בסימולטורים לנהיגה בבסיס קבוע הפועלים על מחשבים בשנים האחרונות כחלופה לביצוע מחקרי נהיגה בדרכים. לאחר שלמדנו, פיתחנו וחקרנו במשך למעלה מ-11 שנים בקהילת מחקר הנהיגה, הקמנו פלטפורמת הדמיית נהיגה עם מכונית אמיתית המורכבת מתוכנת הדמיית נהיגה בקוד פתוח וערכת חומרה, הכוללת הגה ותיבת הילוכים, שלושה דוושות, שלושה מקרנים רכובים ושלושה מסכי מקרן. עם תוכנת סימולציית הנהיגה תומכת במסך אחד בלבד, הפרוטוקול המוצג השתמש רק במקרן המרכזי ובמסך המקרן כדי לבצע את הניסוי.
ישנם שני יתרונות עיקריים של שימוש בפלטפורמת סימולציית הנהיגה המוצגת. אחד היתרונות של פלטפורמה זו הוא שהיא משתמשת בתוכנת קוד פתוח. באמצעות פלטפורמת הקוד הפתוח הידידותית למשתמש, החוקרים יכולים להתאים אישית את ערכת הכלים הסימולציה והרוטטת לצרכי המחקר הייחודיים שלהם על ידי יצירת תצורת תוכנה פשוטה ללא כל פיתוח קוד . על ידי שינוי הקודים, החוקרים יכולים ליצור סימולציות נהיגה המספקות נאמנות יחסית למציאות עם שפע של אפשרויות זמינות על סוגי רכב, סוגי כבישים, התנגדות להגה, מערבולת רוח לרוחב ואורך, ממשקי תוכנית יישום אירוע זמן ובלמים (API) לסנכרון תוכנה חיצונית, ויישום פרדיגמות התנהגותיות כגון המשימה הבאה לרכב ומשימת N-Back. למרות ביצוע מחקר הקשור לנהיגה בסימולטור נהיגה לא יכול לשכפל באופן מלא נהיגה בעולם האמיתי, נתונים שנאספו באמצעות סימולטור נהיגה הוא סביר ואומץ נרחב על ידי חוקרים17,18.
יתרון נוסף של סימולטור הנהיגה המוצע הוא העלות הנמוכה שלה. כפי שהוזכר קודם לכן, תוכנת סימולציית הנהיגה שהוצגה היא תוכנת קוד פתוח הזמינה למשתמשים ללא תשלום. בנוסף, העלות הכוללת של התקנת החומרה כולה בפרוטוקול זה נמוכה יותר בהשוואה לסימולטורים מסחריים טיפוסיים לנהיגה בנאמנות גבוהה. איור 1 a ו- b מציגים את ההתקנה המלאה של שני סימולטורים לנהיגה בעלות הנעה בין $3000 ל$ $30000. לעומת זאת, סימולטורים מסחריים טיפוסיים לנהיגה בנאמנות גבוהה (בסיס קבוע) עולים בדרך כלל בסביבות $10,000 עד $100,000. עם מחיר סביר מאוד שלה, סימולטור נהיגה זה יכול להיות בחירה פופולרית לא רק למטרות מחקר אקדמי, אלא גם לניהול שיעורי נהיגה19 ולהדגמה של טכנולוגיות הקשורות לנהיגה20,21.
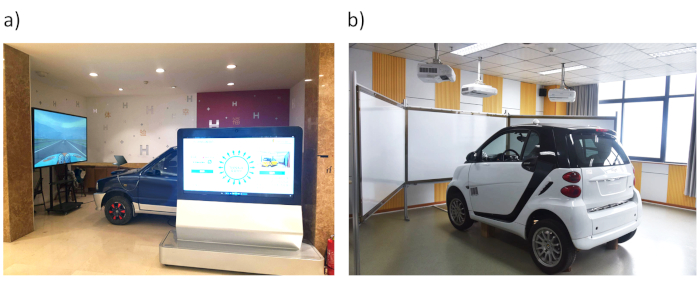
איור 1: תמונה של סימולטורים לנהיגה. שני סימולטורים לנהיגה כללו הגה ותיבת הילוכים, שלושה דוושות ורכב. (א) הגדרת סימולטור נהיגה $סך $3000 שהשתמשה במסך LCD בגודל 80 אינץ’ ברזולוציה של 3840 × 2160. (ב) הגדרת סימולטור נהיגה בסך $30000 שהשתמשה בשלושה מקרנים נטענים וב-3 מסכי מקרן עם ממד של 223 x 126 ס”מ כל אחד. מסכי ההקרנה הונחו 60 ס”מ מעל פני הקרקע ו-22 ס”מ מחזית הרכב. רק המקרן המרכזי ומסך המקרן שימשו לניסוי הנוכחי. לחץ כאן כדי להציג גירסה גדולה יותר של איור זה.
תוכנת סימולציית הנהיגה ועקרת הכלים הרוטטת בשיטה המוצעת כבר שימשו במחקרים קודמים על ידי החוקרים שלנו22,23,24,25,26,27,28,29. ערכת כלים רוטטת שפותחה על ידי עצמה בהתאם לתקן ISO30 ניתנת להחלה בשדות שונים31,32 על ידי התאמת תדירות הרטט ועוצמתו. חשוב לציין כי פותחה גירסה חדשה יותר של ערכת הכלים הרוטטת והיא מוצגת בפרוטוקול הבא. במקום להתאים את תדר הרטט באמצעות מתאם מתח מתכוונן, הגרסה החדשה מצוידת בחמישה תדרי רטט שונים וניתן להתאים אותה בקלות רבה יותר באמצעות הקודים המסופקים בקובץ קידוד משלים 1. יתר על כן, סימולטור הנהיגה המוצג מספק לחוקרים דרך בטוחה, זולה ויעילה לחקור סוגים שונים של מחקר הקשור לנהיגה. לפיכך, פרוטוקול זה מתאים למעבדות מחקר שיש להן תקציב מוגבל ויש להן צורך חזק להתאים אישית סביבות נהיגה ניסיוניות.
