Secondo i dati rivelati dal Global Health Estimates nel 2016, l’infortunio al codice della strada è l’ottava causa di morti globali, con 1,4 milioni di morti in tuttoil mondo 1. Nel 2018, il 39,2% degli incidenti stradali sono stati collisioni con veicoli a motore nel settore dei trasporti e il 7,2% sono stati collisioni posteriori. Una soluzione per aumentare la sicurezza dei veicoli e della strada è lo sviluppo di un sistema avanzato di assistenza alla guida (ADAS) per avvertire i conducenti con potenziali pericoli. I dati hanno dimostrato che ADAS può ridurre notevolmente il tasso di collisioni posteriori ed è ancora più efficace se dotato di un sistema di frenata automatica2. Inoltre, con lo sviluppo di veicoli autonomi, sarà richiesto un minore coinvolgimento umano per controllare il veicolo, rendendo necessario un sistema di richiesta di partecipazione (TOR) quando il veicolo autonomo non riesce a regolarsi da solo. La progettazione del sistema di allarme ADAS e TOR è ora un’importante tecnologia per i conducenti per evitare incidenti imminenti in pochi secondi. L’esperimento esemplare ha utilizzato un toolkit vibrante insieme a una piattaforma di simulazione di guida per indagare quale posizione genererebbe il miglior risultato quando un sistema di avvertimento vibrotattile è stato utilizzato come potenziale sistema di avvertimento ADAS e TOR.
Categorizzati per canali percettivi, esistono generalmente tre tipi di modalità di avviso, o cioè visive, udibili e tattili. Ogni modalità di avvertimento ha i suoi meriti e limiti. Quando sono in uso sistemi di allarme visivo, i conducenti possono soffrire di sovraccaricovisivo 3,compromettendo le prestazioni di guida a causa della cecità disattenta4,5. Sebbene un sistema di avviso uditivo non influenzi il campo visivo dei conducenti, la sua efficacia dipende notevolmente dall’ambiente circostante come musica di sottofondo e altri rumorinell’ambiente di guida 6,7. Pertanto, situazioni che contengono altre informazioni uditivo esterne o rumore significativo possono portare a sordità disattenta8,9, riducendo l’efficacia di un sistema di avviso uditivo. In confronto, i sistemi di avvertimento tattili non competono con l’elaborazione visiva o uditivo dei conducenti. Inviando avvisi vibrotattili ai conducenti, i sistemi di allarme tattile superano i limiti dei sistemi di allarme visivi e uditivi.
Studi precedenti hanno dimostrato che le avvertenze tattili possono avvantaggiare i conducenti abbreviando i tempi di risposta dei freni. Si è inoltre constatato che i sistemi di allarme tattile danno un risultato più efficace rispetto ai sistemi di allarme visivi10,11 e uditivi 12,13,14 in determinate situazioni. Tuttavia, una ricerca limitata si è concentrata sullo studio della posizione ottimale per posizionare un dispositivo di avviso tattile. Secondo l’ipotesi della corteccia sensoriale15 e l’ipotesi della distanza sensoriale16, lo studio esemplare ha scelto le aree del dito, del polso e della tempia come luoghi sperimentali per posizionare un dispositivo di avvertimento tattile. Con il protocollo introdotto, la frequenza e il tempo di consegna di un avviso vibrante, e gli intervalli tra le vibrazioni del toolkit vibrante, possono essere configurati per soddisfare i requisiti sperimentali. Questo toolkit vibrante consisteva in un chip master, un chip regolatore di tensione, un multiplexer, un adattatore DA USB a Transistor-Transistor-Logic (TTL), un transistor MOSFET (Metal-Oxide-Semiconductor Field-Effect Transistor) e un modulo Bluetooth. Il numero di moduli vibranti può anche variare in base alle esigenze dei ricercatori, con un massimo di quattro moduli che vibrano contemporaneamente. Quando si implementa il toolkit vibrante negli esperimenti relativi alla guida, può essere configurato per adattarsi alle impostazioni sperimentali e sincronizzato con i dati sulle prestazioni di guida rivedendo i codici della simulazione di guida.
Mentre per i ricercatori, condurre un esperimento di guida su una piattaforma virtuale è più fattibile che nel mondo reale a causa del rischio e dei costi coinvolti. Ad esempio, la raccolta di indicatori di prestazione può essere difficile ed è difficile controllare i fattori ambientali coinvolti quando vengono condotti esperimenti nel mondo reale. Di conseguenza, molti studi hanno utilizzato simulatori di guida a base fissa in esecuzione su PC negli ultimi anni come alternativa allo svolgimento di studi di guida su strada. Dopo aver appreso, sviluppato e ricercato per oltre 11 anni nella comunità di ricerca sulla guida, abbiamo creato una piattaforma di simulazione di guida con una vera auto che consiste in un software di simulazione di guida open source e un kit hardware, tra cui volante e cambio, tre pedali, tre proiettori montati e tre schermi del proiettore. Con il software di simulazione di guida supporta un solo schermo, il protocollo presentato utilizzava solo il proiettore centrale e lo schermo del proiettore per condurre l’esperimento.
Ci sono due vantaggi principali nell’utilizzo della piattaforma di simulazione di guida presentata. Un vantaggio di questa piattaforma è che utilizza un software open source. Utilizzando la piattaforma open source intuitiva, i ricercatori possono personalizzare il toolkit di simulazione e vibrazione per le loro esigenze di ricerca uniche rendendo semplice la configurazione del software senza alcuno sviluppo di codice . Rivedendo i codici, i ricercatori possono creare simulazioni di guida che forniscono relativa fedeltà alla realtà con molte opzioni disponibili su tipi di auto, tipi di strada, resistenza del volante, turbolenza del vento laterale e longitudinale, interfacce del programma di applicazione di eventi di tempo e freno (API) per la sincronizzazione del software esterno e implementazione dei paradigmi comportamentali come il compito di seguire l’auto e il compito N-Back. Sebbene condurre ricerche relative alla guida in un simulatore di guida non possa replicare completamente la guida nel mondo reale, i dati raccolti attraverso un simulatore di guida sono ragionevoli ed è stato ampiamenteadottato dai ricercatori 17,18.
Un altro vantaggio del simulatore di guida proposto è il suo basso costo. Come accennato in precedenza, il software di simulazione di guida introdotto è un software open source disponibile gratuitamente per gli utenti. Inoltre, il costo totale dell’intera configurazione hardware in questo protocollo è inferiore rispetto ai tipici simulatori di guida commerciale ad alta fedeltà. La figura 1 a e b mostra la configurazione completa di due simulatori di guida con un costo che va da $ 3000 a $ 30000. Al contrario, i tipici simulatori di guida commerciale ad alta fedeltà (base fissa) di solito costano da $ 10,000 a $ 100,000. Con il suo prezzo altamente conveniente, questo simulatore di guida può essere una scelta popolare non solo per scopi di ricerca accademica, ma anche per condurrelezioni di guida 19 e per la dimostrazione di tecnologie legate allaguida 20,21.
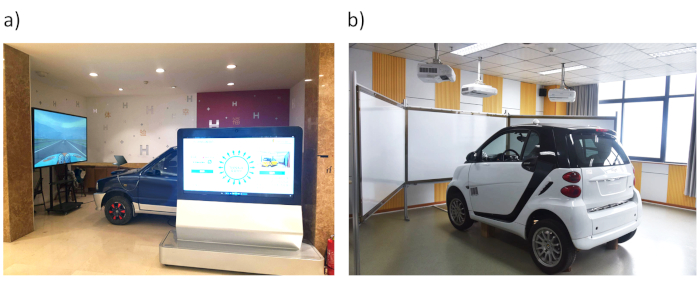
Figura 1: Immagine dei simulatori di guida. Entrambi i simulatori di guida consistevano in un volante e un cambio, tre pedali e un veicolo. (a) Una configurazione del simulatore di guida da $ 3000 che utilizzava uno schermo LCD da 80 pollici con una risoluzione di 3840 × 2160. (b) Una configurazione del simulatore di guida da $ 30000 che utilizzava tre proiettori montati e tre schermi di proiettori con una dimensione di 223 x 126 cm ciascuno. Gli schermi di proiezione sono stati posizionati a 60 cm dal suolo e a 22 cm di distanza dalla parte anteriore del veicolo. Solo il proiettore centrale e lo schermo del proiettore sono stati utilizzati per l’esperimento corrente. Clicca qui per visualizzare una versione più grande di questa figura.
Il software di simulazione di guida e il toolkit vibrante nel metodo proposto sono già stati utilizzati in precedenti studi dai nostriricercatori 22,23,24,25,26,27,28,29. Questo toolkit vibrante auto-sviluppato seguendo lo standard ISO30 può essere applicato in diversicampi 31,32 regolando la frequenza e l’intensità delle vibrazioni. È importante notare che è stata sviluppata una versione più recente del toolkit vibrante che viene introdotta nel seguente protocollo. Invece di regolare la frequenza delle vibrazioni utilizzando un adattatore di tensione regolabile, la versione più recente è dotata di cinque diverse frequenze di vibrazione e può essere regolata più facilmente utilizzando i codici forniti nel file di codifica supplementare 1. Inoltre, il simulatore di guida presentato fornisce ai ricercatori un modo sicuro, economico ed efficace per indagare vari tipi di ricerca relativa alla guida. Pertanto, questo protocollo è adatto a laboratori di ricerca che hanno un budget limitato e hanno una forte necessità di personalizzare gli ambienti di guida sperimentali.
