2016 yılında Küresel Sağlık Tahminleri tarafından ortaya çıkan verilere göre, trafik yaralanması küresel ölümlerin sekizinci nedenidir ve dünya çapında 1,4 milyon ölüme yol açan1. 2018 yılında trafik kazalarının %39,2’sini ulaşımda motorlu kara taşıtları, %7,2’sini ise arkadan çarpmalar meydana aldı. Araç ve yol güvenliğini artırmak için bir çözüm, potansiyel tehlikeleri olan sürücüleri uyarmak için gelişmiş bir sürüş destek sisteminin (ADAS) geliştirilmesidir. Veriler, ADAS’ın arkadan çarpma oranını büyük ölçüde azaltabileceğini ve bir otomatik fren sistemi ile donatıldığında daha da etkili olduğunugöstermiştir 2. Buna ek olarak, otonom araçların geliştirilmesiyle, aracı kontrol etmek için daha az insan katılımı gerekecek ve otonom araç kendini düzenleyemediğinde devralma talebi (TOR) uyarı sistemini bir gereklilik haline getirecektir. ADAS ve TOR uyarı sisteminin tasarımı artık sürücülerin birkaç saniye içinde yakın kazalardan kaçınmaları için önemli bir teknoloji parçası. Örnek deney, potansiyel bir ADAS ve TOR uyarı sistemi olarak vibrotactile uyarı sistemi kullanıldığında hangi konumun en iyi sonucu vereceğini araştırmak için bir sürüş simülasyon platformu ile birlikte titreşimli bir araç seti kullandı.
Algısal kanallara göre kategorize edilen, genellikle görsel, işitsel ve dokunsal olmak üzere üç tür uyarı yöntemi vardır. Her uyarı modalitesinin kendi yararları ve sınırlamaları vardır. Görsel uyarı sistemleri kullanımdayken, sürücüler görsel aşırı yüklenmeden muzdarip olabilir3, dikkatsiz körlük nedeniyle sürüş performanslarını bozar4,5. İşitsel bir uyarı sistemi sürücülerin görsel alanını etkilemese de, etkinliği büyük ölçüde arka plan müziği ve sürüş ortamındaki diğer sesler gibi çevreye bağlıdır6,7. Bu nedenle, diğer dış işitsel bilgileri veya önemli gürültüyü içeren durumlar dikkatsiz sağırlığa yol açabilir8,9, işitsel uyarı sisteminin etkinliğini azaltabilir. Buna karşılık, dokunsal uyarı sistemleri sürücülerin görsel veya işitsel işlemleriyle rekabet etmez. Dokunsal uyarı sistemleri, sürücülere vibrotactile uyarıları göndererek görsel ve işitsel uyarı sistemlerinin sınırlamalarını aşıyor.
Önceki çalışmalar, dokunsal uyarıların fren tepki sürelerini kısaltarak sürücülere fayda sağlayabileceğini göstermiştir. Dokunsal uyarı sistemlerinin belirli durumlarda görsel10 , 11ve işitsel12 ,13,14uyarı sistemleri üzerinde daha etkili bir sonuç verdiği de tespit edildi. Bununla birlikte, sınırlı araştırmalar dokunsal bir uyarı cihazı yerleştirmek için en uygun yeri araştırmaya odaklanmıştır. Duyusal korteks hipotezi15 ve duyusal mesafe hipotezi16‘ya göre, örnek çalışma dokunsal bir uyarı cihazı yerleştirmek için deneysel yerler olarak parmak, bilek ve şakak alanlarını seçti. Sunulan protokol ile titreşimli bir uyarının frekansı ve teslim süresi ve titreşimli takım setinin titreşimleri arasındaki aralıklar deneysel gereksinimlere uyacak şekilde yapılandırılabilir. Bu titreşimli araç seti bir ana çip, bir voltaj regülatör çipi, bir çoklayıcı, bir USB -Transistör-Mantık (TTL) adaptörü, bir Metal-Oksit-Yarı İletken Alan-Efektli Transistör (MOSFET) ve bir Bluetooth modülünden oluşuyordu. Titreşimli modüllerin sayısı da araştırmacıların ihtiyaçlarına göre değişebilir ve aynı anda dört modül titreşebilir. Titreşimli araç setini sürüşle ilgili deneylerde uygularken, deneysel ayarlara uyacak şekilde yapılandırılabilir ve sürüş simülasyonunun kodları revize edilerek sürüş performansı verileriyle senkronize edilebilir.
Araştırmacılar için, sanal bir platformda bir sürüş deneyi yapmak, ilgili risk ve maliyet nedeniyle gerçek dünyada olduğundan daha mümkündür. Örneğin, performans göstergelerini toplamak zor olabilir ve gerçek dünyada deneyler yapılırken ilgili çevresel faktörleri kontrol etmek zordur. Sonuç olarak, birçok çalışma son yıllarda pc’lerde çalışan sabit tabanlı sürüş simülatörlerini yolda sürüş çalışmaları yapmaya alternatif olarak kullanmıştır. Sürüş araştırma topluluğunda 11 yılı aşkın bir süredir öğrendikten, geliştirdikten ve araştırdıktan sonra, açık kaynaklı bir sürüş simülasyon yazılımı ve direksiyon simidi ve şanzıman, üç pedal, üç monte projektör ve üç projektör ekranı içeren bir donanım kitini içeren gerçek bir otomobil ile bir sürüş simülasyon platformu kurduk. Sürüş simülasyon yazılımı sadece tek bir ekranı desteklerken, sunulan protokol deneyi yapmak için yalnızca merkezi projektör ve projektör ekranını kullandı.
Sunulan sürüş simülasyon platformunu kullanmanın iki önemli avantajı vardır. Bu platformun bir avantajı, açık kaynaklı bir yazılım kullanmasıdır. Kullanıcı dostu açık kaynaklı platformu kullanarak, araştırmacılar simülasyon ve titreşimli araç setini benzersiz araştırma ihtiyaçları için herhangi bir kod geliştirme olmadan basit yazılım yapılandırması yaparak özelleştirebilirler. Araştırmacılar, kodları revize ederek, otomobil türleri, yol tipleri, direksiyonun direnci, yanal ve boyuna rüzgar türbülansı, harici yazılım senkronizasyonu için zaman ve fren olayı uygulama programı arayüzleri (API’ler) ve araba takip görevi ve N-Back görevi gibi davranışsal paradigmaların uygulanması konusunda birçok seçenekle gerçeğe göre doğruluğu sağlayan sürüş simülasyonları oluşturabilirler. Bir sürüş simülatöründe sürüşle ilgili araştırmalar yapmak gerçek dünyada sürüşü tam olarak çoğaltamasa da, bir sürüş simülatörü aracılığıyla toplanan veriler makuldür ve araştırmacılar tarafından yaygın olarak benimsenmiştir17,18.
Önerilen sürüş simülatörünün bir başka avantajı da düşük maliyetidir. Daha önce de belirtildiği gibi, tanıtılan sürüş simülasyon yazılımı, kullanıcılara ücretsiz olarak sunulan açık kaynaklı bir yazılımdır. Buna ek olarak, bu protokoldeki tüm donanım kurulumunun toplam maliyeti, tipik yüksek kaliteli ticari sürüş simülatörlerine kıyasla daha düşüktür. Şekil 1 a ve b, maliyeti 3000 ila 30000 $ arasında değişen iki sürüş simülatörünün tam kurulumunu göstermektedir. Buna karşılık, tipik yüksek kaliteli ticari sürüş simülatörleri (sabit tabanlı) genellikle yaklaşık 10.000 ila 100.000 $ ‘a mal olur. Son derece uygun fiyatı ile, bu sürüş simülatörü sadece akademik araştırma amaçları için değil, aynı zamanda sürüş sınıfları19 ve sürüş ile ilgili teknolojilerin gösterimi için popüler bir seçim olabilir20,21.
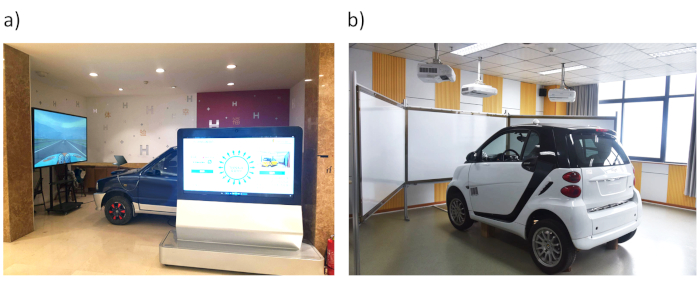
Şekil 1: Sürüş simülatörlerinin bir görüntüsü. Her iki sürüş simülatörü de direksiyon simülatörü ve şanzıman, üç pedal ve bir araçtan oluşuyordu. (a) 3840 × 2160 çözünürlüğe sahip 80 inç LCD ekran kullanan 3000 dolarlık bir sürüş simülatörü kurulumu. (b) Her biri 223 x 126 cm boyuta sahip üç monte projektör ve üç projektör ekranı kullanan 30000 $ sürüş simülatörü kurulumu. Projeksiyon ekranları yerden 60 cm yüksekte ve aracın önünden 22 cm uzağa yerleştirildi. Mevcut deney için sadece merkezi projektör ve projektör ekranı kullanıldı. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
Önerilen yöntemdeki sürüş simülasyon yazılımı ve titreşimli araç seti, araştırmacılarımız tarafından önceki çalışmalarda22 , 23 , 24,25,26,27,28,29tarafından zaten kullanılmıştır. ISO standardı30’u takip eden bu kendi geliştirdiği titreşimli takımseti,titreşim frekansı ve yoğunluğu ayarlanarak31,32 farklı alanlarda uygulanabilir. Titreşimli araç setinin daha yeni bir sürümünün geliştirildiğini ve aşağıdaki protokolde tanıtıldığını belirtmek önemlidir. Ayarlanabilir bir voltaj adaptörü kullanarak titreşim frekansını ayarlamak yerine, yeni versiyon beş farklı titreşim frekansı ile donatılmıştır ve Ek Kodlama Dosyası 1’desağlanan kodlar kullanılarak daha kolay ayarlanabilir. Ayrıca, sunulan sürüş simülatörü araştırmacılara sürüşle ilgili çeşitli araştırmaları araştırmak için güvenli, ucuz ve etkili bir yol sağlar. Bu nedenle, bu protokol sınırlı bir bütçeye sahip ve deneysel sürüş ortamlarını özelleştirmek için güçlü bir ihtiyacı olan araştırma laboratuvarları için uygundur.
