12 animals were randomly assigned to one of two groups: the unloading group (UL, n = 6) or the control group (Ctrl, n = 6). For the UL group, the hindlimbs of the animals were unloaded by the tail for 2 weeks (UL period), whereas the Ctrl group animals were left free. 2 weeks after unloading, the UL group showed a distinct gait pattern compared with the Ctrl group. Figure 1 shows normalized joint trajectories of representative subjects. During the stance phase, the UL group exhibited further extensions in the knee and ankle (i.e., plantarflexion for the ankle) than the Ctrl group, called "toe walking"3,16. The goal of this study was to determine the comprehensive characteristics of these motion deteriorations. To elucidate quantitative measures out of these overall outcomes, three parameters were implemented as stated above: KSt, knee angle at the midstance; ASt, ankle angle; MHD, metatarso hip distance (vertical distance between the fifth metatarsophalangeal joint and hip joint), which is virtually equivalent to the height of the hip joint at midstance.
At 2 weeks (2 weeks after unloading), both the KSt and ASt of the UL group were significantly greater than those of the Ctrl group (Figure 2A,B, unpaired t-test: p < 0.01). In addition, MHD was considerably higher in the UL group (Figure 3, unpaired t-test: p < 0.01). The paw position during midstance is shown in Supplementary Figure 1.
Less activity through unloading might cause neural alterations22,23,24,25. Those alterations could lead to deterioration in functional features of locomotor systems3,4 and musculoskeletal features. Significant changes in the parameters described above may be attributed to those neural alterations.
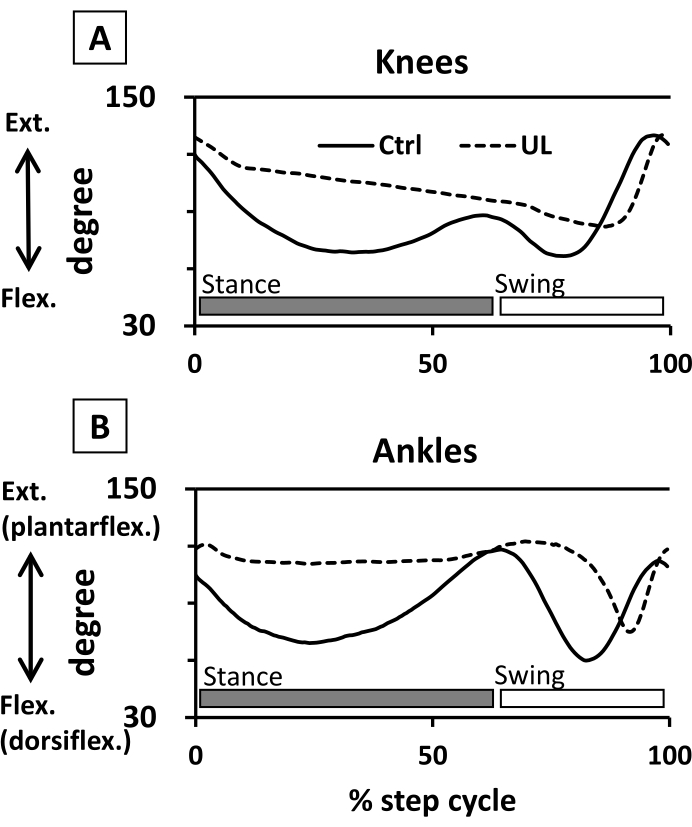
Figure 1: Normalized joint trajectories of the representative subjects. The ordinate is adjusted so that the trajectories in the diagram appear approximately in the center. (A) Knee and (B) ankle joints in the unloading group exhibited further extension (plantar flexion for the ankle) than the control group during the stance phase. Please click here to view a larger version of this figure.
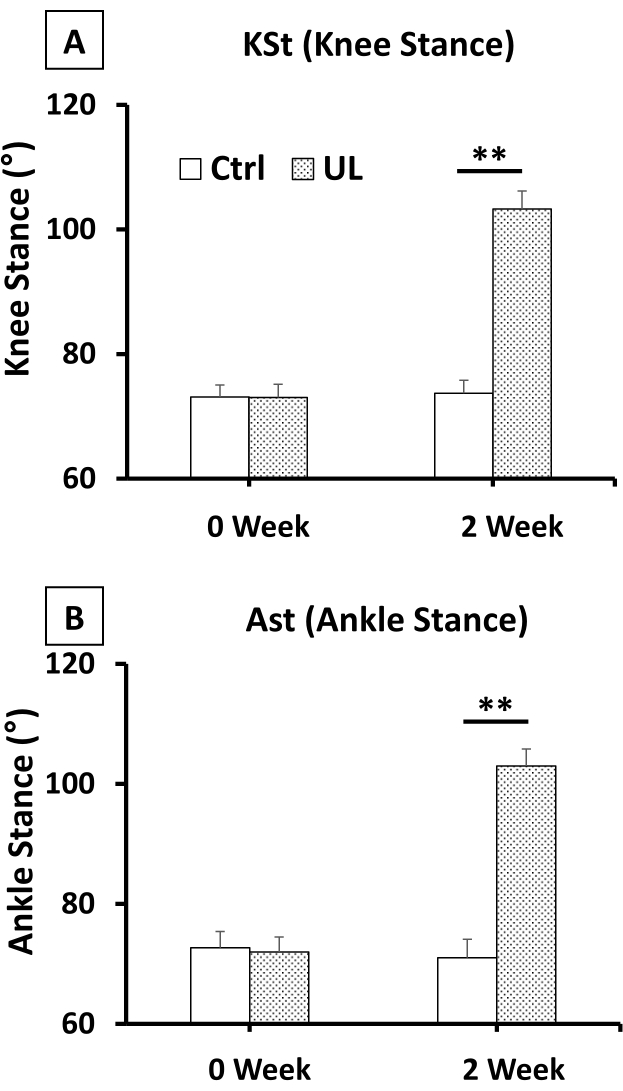
Figure 2: Joint angles of the knee and ankle at midstance. The unloading group showed significantly greater angles both in (A) KSt (knee) and (B) Ast (ankle) than the control group (unpaired t-test: p < 0.01). The error bar represents the 95% confidence interval. Please click here to view a larger version of this figure.
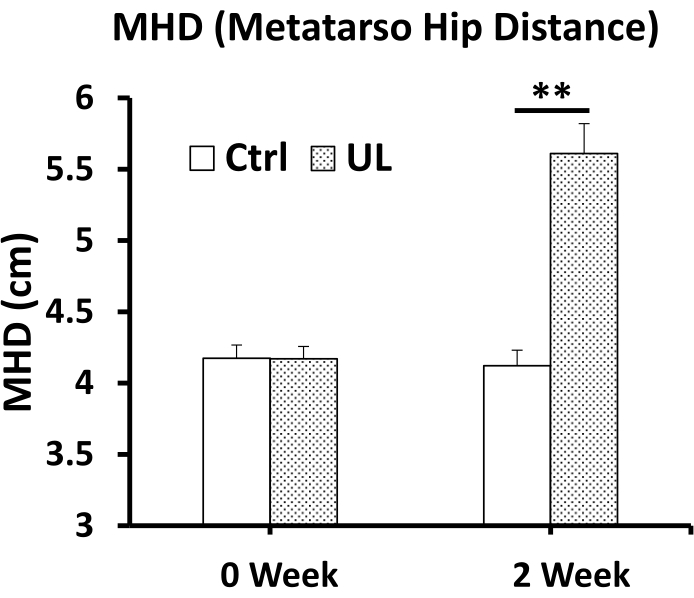
Figure 3: Height of the hip joint at midstance. The metatarso hip distance of the unloading group was significantly higher than that of the control group (unpaired t-test: p < 0.01). The error bar represents the 95% confidence interval. Please click here to view a larger version of this figure.
Supplementary File 1: A schematic representing the sequence of procedures. Please click here to download this File.
Supplementary Figure 1: The paw position of the rat during midstance. Please click here to download this File.
Supplementary Video 1: Footstep tracking from the bottom. Please click here to download this Video.
Supplementary Video 2: Evaluation of reaching motions. Please click here to download this Video.
