Epidemiologische gegevens geven aan dat er wereldwijd elk jaar ~17 miljoen nieuwe gevallen van beroerte zijn, met een toename van de incidentie in lage- en middeninkomenslanden. Het aantal nieuwe gevallen zal naar schatting toenemen tot 77 miljoen in 20302. Motorische stoornissen als gevolg van een beroerte beïnvloeden vaak de mobiliteit van de patiënt en de deelname aan dagelijkse activiteiten, wat bijdraagt aan een lage kwaliteit van leven. Traditionele motorische revalidatie omvat manuele therapie, maar in de afgelopen decennia zijn robotsystemen voor revalidatie ontwikkeld. Deze systemen kunnen therapie leveren met hoge intensiteit, dosis, kwantificeerbaarheid, betrouwbaarheid, herhaalbaarheid en flexibiliteit3 en hebben potentieel getoond als effectieve revalidatiebehandelingen voor zowel acute als chronische patiënten met een beroerte 4,5,6. Naast het leveren van therapie kunnen robotsystemen voor revalidatie worden gebruikt als evaluatie-instrumenten, omdat ze kunnen worden uitgerust met sensoren die kinematische/kinetische gegevens van de beweging van de patiënt kunnen meten 7,8. Voor motorische revalidatie van de bovenste ledematen is niet alleen bewezen dat dergelijke gegevens nuttig zijn voor het beoordelen van het niveau van motorisch herstel van de patiënt dat wordt uitgelokt door robottherapie en dienden ze als een aanvullend hulpmiddel bij traditionele klinische beoordelingen 9,10, maar hebben ze ook bijgedragen aan het bevorderen van het begrip van het proces van motorisch herstel na een beroerte11, 12 evenals neurale controle van beweging en motorisch leren bij gezonde proefpersonen 3,13,14. Als gevolg hiervan hebben deze bevindingen een basis gelegd voor het verbeteren van revalidatiebehandelingen15.
In de afgelopen twee decennia zijn er veel robotapparaten voor neurorevalidatie van de onderste ledematen voorgesteld, variërend van exoskeletten die het lichaamsgewicht van de patiënt ondersteunen tijdens het lopen (bijv. over een loopband, zoals Lokomat16) tot stationaire robotsystemen waarmee de patiënt de enkel, knie of voet kan trainen zonder te lopen (zoals de Rutgers Ankle17, de High-Performance Ankle Rehabilitation Robot18 en de enkel-/voetrevalidatierobot van het Gwangju Institute of Science and Technology (GIST)19) of actieve voetorthesen die worden aangedreven exoskeletten die door de patiënt worden gedragen om over de grond of over een loopband te lopen (zoals de Powered Gait Orthosis20 en de MIT Anklebot21). Zie 22,23,4 voor een recensie over robots voor revalidatie van de onderste ledematen.
De resultaten van klinische onderzoeken naar robotapparaten voor revalidatie van de onderste ledematen bij patiënten met een beroerte zijn bemoedigend en hebben aangetoond dat deze systemen het bewegingsbereik (ROM), de spierkracht of het looppatroon van de gewrichten kunnen verbeteren, afhankelijk van het specifieke apparaat en het klinische protocol (zie 24,25 voor een overzicht van de werkzaamheid van robots van de onderste ledematen voor revalidatie). Hoewel is gepostuleerd dat robotondersteunde therapie neuroplastische veranderingen bevordert, die uiteindelijk resulteren in verbeterde motorische vaardigheden26, blijft het grotendeels onduidelijk hoe het proces van motorisch herstel van een beroerte precies plaatsvindt en welke robottrainingsprotocollen het proces van herstel van de motorische vaardigheden van de onderste ledematen optimaliseren. In feite is er een significante, groeiende ongelijkheid tussen de toenemende ontwikkeling van revalidatierobots (door academische onderzoekers of commerciële entiteiten) en het beperkte begrip van de neurofysiologische mechanismen die ten grondslag liggen aan motorisch herstel4. Metingen van bewegingskinematica of gewrichtskoppels die met ingebouwde sensoren zijn uitgevoerd, hebben bijgedragen aan het kwantitatief beschrijven van motorische gedragsveranderingen die optreden wanneer patiënten de motorische vaardigheden van de onderste ledematen herstellen 27,28,29, waardoor deze leemte gedeeltelijk wordt opgevuld. De neurale correlaten die aan dergelijke veranderingen ten grondslag liggen, zijn echter minder onderzocht. Dit heeft verschillende redenen.
Functionele beeldvorming van de hersenen is tijdrovend en soms moeilijk te voltooien in de context van klinische onderzoeken, waarbij de belasting van de patiënt vaak minimaal moet worden gehouden om de kans te maximaliseren dat de patiënt zich aan het onderzoek houdt. Dit geldt met name voor personen die een beroerte hebben gehad, gezien het feit dat vermoeidheid en spierzwakte na een beroerte vaak worden waargenomen30. Ook beeldvormingsmodaliteiten die gebaseerd zijn op magnetische velden, zoals functionele Magnetic Resonance Imaging (fMRI), vereisen dat zowel patiënt- als robothardware magneetveilig is.
Van de niet-invasieve beeldvormingsmodaliteiten is functionele nabij-infraroodspectroscopie (fNIRS) een beeldvormingstechniek die bijzonder geschikt is voor het beoordelen van hersenactiviteitsgebieden bij proefpersonen die robottherapie ondergaan. Net als fMRI meet fNIRS de zuurstoftoevoer/deoxygenatie in het bloed in de hersenen. In tegenstelling tot fMRI is fNIRS echter volledig compatibel met robothardware en is het vaak draagbaar en zelfs bruikbaar aan het bed. fNIRS heeft ook lage kosten en minder gevoeligheid voor bewegingsartefacten 31,32,33.
Ondanks de duidelijke voordelen en het wijdverbreide gebruik in veel klinische omgevingen sinds de eerste introductie in de late jaren 7034, hebben slechts enkele onderzoeken fNIRS gebruikt om hersenactiviteit te kwantificeren die verband houdt met bewegingen van de onderste ledematen en motorisch herstel van een beroerte. FNIRS-studies gericht op het ophelderen van mechanismen van neurale controle van beweging en/of mechanismen of evaluatie van motorisch herstel na een beroerte hebben meestal bewegingen van één gewricht onderzocht (bijv. dorsaalflexie, plantairflexie of knie-extensiebewegingen35,36,37), lopen 38,39,40,41,42,43 of fietsen 44. Zie45 voor een recensie. Evenzo hebben fNIRS-onderzoeken naar robotondersteunde therapie voor de onderste ledematen zich vooral gericht op robotondersteunde looprevalidatie; Zie46 voor een recensie. Een paar studies hebben zich gericht op het gebruik van fNIRS als onderdeel van een Brain-Computer Interface (BCI)-systeem om besturingssignalen voor robotapparaten af te leiden47,48; hoewel dit onderzoeksgebied ook afhankelijk is van de verwerking van fNIRS-signalen, is het doel anders en voornamelijk gericht op het decoderen van de intenties van patiënten (bijv. patiënten met ernstige motorische handicaps).
De hierin gepresenteerde pilotstudie maakt deel uit van een eerste poging om de effecten van een robotsysteem voor revalidatie van de onderste ledematen te onderzoeken. De robot kan doelgerichte revalidatie van de onderste ledematen leveren, waarbij wordt getraind in dagelijkse bewegingen met meerdere gewrichten, en therapie geven aan afzonderlijke gewrichten (bijv. knie of enkel) van de onderste ledematen (d.w.z. een bottom-up revalidatieprogramma implementeren).
De studie had tot doel de haalbaarheid te onderzoeken van een experimenteel protocol dat de verwerving van fNIRS-gegevens vereiste tijdens het uitvoeren van gerichte bewegingen van de onderste ledematen, met meerdere gewrichten. De duur van de data-acquisitieperiode in deze studie, die beperkt was tot 6 minuten, is korter dan bij typische fNIRS-protocollen. Dit was een bewuste keuze met als doel de bruikbaarheid en klinische toepasbaarheid van dit onderzoek te vergroten, met name bij patiënten met beperkte mobiliteit of kracht. Het identificeren van fNIRS-correlaten van dergelijke complexe bewegingen met meerdere gewrichten en het verkrijgen van inzicht in hoe hersenactiviteit werd gemoduleerd door robotassistentie waren ook aandachtspunten. Hiervoor werden twee experimenteersessies uitgevoerd met dezelfde deelnemers: één zonder robotassistentie en één met robotassistentie. Ten slotte is het belangrijk op te merken dat deze studie zich richtte op gezonde proefpersonen om een basis te leggen voor toekomstig onderzoek in termen van de haalbaarheid van het registratieprotocol en de evaluatie van hersenactiviteit tijdens bewegingen die het doelwit zijn van robottherapie.
Apparaat
Een draagbare robot die is ontworpen om revalidatie van de onderste ledematen te leveren (zie figuur 1) werd gebruikt om onze experimenten uit te voeren. De robot heeft een 3D-bereikbare werkruimte en is compact en licht, met een gewicht van ongeveer 35 lb., waardoor hij gemakkelijk te vervoeren en te installeren is.
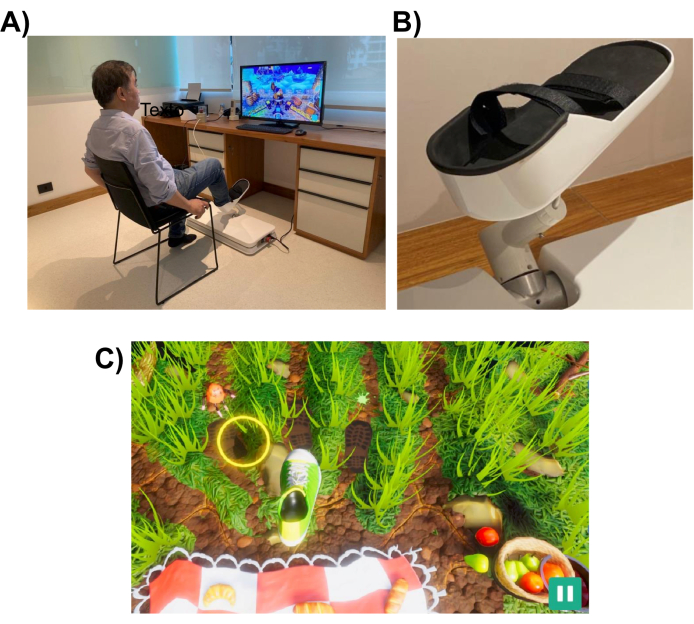
Figuur 1: Experimentele opstelling. (A) Het robotsysteem (geïnstalleerd op de vloer) ontworpen voor de onderste ledematen. Een vrijwilliger wordt getoond die de interface met zijn rechtervoet gebruikt. (B) Ondersteuningsstructuur voor de voet van de proefpersoon die bevestiging aan het robotsysteem mogelijk maakt. (C) Een screenshot van het Picnic-spel. Het doel van het spel is om de voet (groene en witte schoen) naar het doel (gele cirkel) te verplaatsen. Klik hier om een grotere versie van deze figuur te bekijken.
Het robotsysteem is ontworpen om een patiënt te helpen bij het uitvoeren van bewegingen van de onderste ledematen die vergelijkbaar zijn met die van alledaagse taken, zoals wijzen of schoppen. Het maakt gebruik van interactieve virtual reality-games, die worden weergegeven op een computermonitor of een televisiescherm dat voor het robotapparaat is geplaatst (zie figuur 1). De effector aan het uiteinde van de robot wordt bevestigd aan de onderste ledematen van de patiënt (bijv. enkel) en de positie ervan wordt toegewezen aan de positie van een cursor op het scherm. Een typisch spel toont de bewegingsdoelen van de patiënt (bijv. het object waarnaar moet worden gewezen of waar de bal moet worden geschopt).
Om de bewegingstaak te voltooien, kan de robot de patiënt helpen met een niveau van ondersteuning dat kan variëren van volledige hulp tot geen. Het niveau van robotondersteuning wordt aan het begin van elke revalidatiesessie gekozen op basis van de mate van motorische beperking van de patiënt. De bewegingen die door de proefpersoon worden uitgevoerd, worden door het spel gebruikt om de prestaties van de patiënt te scoren en hen feedback te geven over hun prestaties (bijv. ROM, aantal bewegingen en niveau van robotassistentie). De spellen zijn ontworpen om interactief en vermakelijk te zijn om de interesse en aandacht van de patiënt vast te houden. In dit onderzoek speelden de deelnemers het “Picnic-spel”, waarbij de speler moest voorkomen dat de insecten de handdoek bereikten en het voedsel stalen (zie figuur 1, onderste paneel, voor een screenshot).
Data-acquisitie werd uitgevoerd met een draagbaar fNIRS-acquisitiesysteem met twee verschillende optodes met continue golven (760 nm en 850 nm), 8 dual-tip LED-bronnen en 8 dual-tip actieve detectoren. De signalen werden verkregen met behulp van een bemonsteringsfrequentie van 10,17 Hz. Een laptop werd gebruikt voor de kalibratie-optimalisatie en signaalregistratie met behulp van een Wi-Fi-netwerk dat door het fNIRS-systeem werd gecreëerd.
Een dop werd gebruikt om de optodes op de vooraf bepaalde locaties vast te houden. De bronnen en detectoren werden volgens het 10-10 internationale EEG-systeem in een raster ruimtelijke verdeling geplaatst. Elk fNIRS-kanaal werd gedefinieerd door een bron-detectorpaar met interoptode-afstanden van ongeveer 30 mm. De optodes werden geplaatst over de aanvullende motor-, premotor- en motorgebieden op de locaties die worden weergegeven in figuur 2. Het totale aantal kanalen was 28, waarvan 8 korteafstandskanalen die aan elke bron waren gekoppeld met behulp van een glasvezeladapter aan een enkele detector. Gezien de multiplexing-opstelling van de hardware, is het mogelijk om informatie over korte afstanden uit alle bronnen te verkrijgen met slechts één detector.
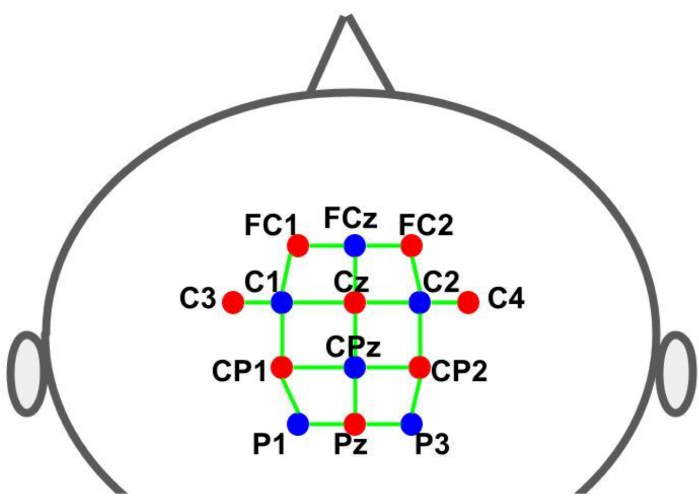
Figuur 2: Montagelay-out met behulp van het 10-10 EEG-systeem. De letters en cijfers geven de locaties van de bron/detector aan. De rode en blauwe stippen vertegenwoordigen respectievelijk de bron- en detectoroptodes. De groene lijnen vertegenwoordigen de fNIRS-kanalen die bestaan uit bron- en detectorparen. Klik hier om een grotere versie van deze figuur te bekijken.
Experimenteel ontwerp
Het experiment werd uitgevoerd onder twee verschillende experimentele omstandigheden, die verschilden in het niveau van assistentie dat door de robot werd geboden voor de bewegingen van de proefpersoon. In de eerste toestand was de robot geprogrammeerd om geen hulp te bieden aan de bewegingen van de proefpersoon, terwijl in de tweede toestand de robot de voet- en beenbewegingen van de proefpersoon bestuurde (robotondersteunde beweging).
Elk experiment volgde een blokontwerpparadigma met afwisselende cycli van een motorische taak (het spelen van het spel – 30 s) en rusten (30 s), zoals geïllustreerd in figuur 3. Het begin en einde van elke fase (spel/spel of rust) werden via het computerscherm visueel aan de proefpersoon gesignaleerd. Tijdens de rustfase werd een bericht weergegeven dat een pauze aangaf. Elke cyclus (spelen/spel + rust) duurde 60 s en werd zes keer herhaald, wat resulteerde in een totale looptijd van 360 s (6 min).
De deelnemers speelden het “Picknickspel”, waarbij het doel was om te voorkomen dat insecten bij de handdoek zouden komen en voedsel zouden stelen. Dit spel omvatte een opeenvolging van bewegingen van de onderste ledematen, beginnend bij een aangewezen thuisdoel (beginpositie) en zich uitstrekkend naar een van de drie buitenste doelen voordat ze terugkeerden naar het thuisdoel. Op het scherm werden de buitenste doelen visueel weergegeven als geanimeerde bewegende insecten, die de deelnemers moesten bereiken en erop moesten stappen. Er waren drie naar buiten reikende doelen, elk willekeurig een gelijk aantal keren gepresenteerd, naast een gemeenschappelijk thuisdoel voor elke beweging. De afstand die de voet nodig had om van het thuisdoel naar de positie van de buitenste doelen te reizen, vormde een boog van ongeveer 26 cm. De motorische taak vereiste de uitvoering van bewegingen met meerdere gewrichten, waarbij coördinatie tussen knieflexie/-extensie, plantairflexie en dorsaalflexiebewegingen vereist was.
De fNIRS-gegevensregistraties werden gesynchroniseerd met de visuele stimuli die door het spel aan de proefpersoon werden gepresenteerd via een transistor-transistor-logic (TTL)-puls die door de robot werd gegenereerd. Pulsen werden gegenereerd aan het begin van elke fase (spel/spel en rust). Zo werd alle timingcontrole uitgevoerd door het spel, dat visuele aanwijzingen (doelen) aan de deelnemer gaf om elke beweging te starten, TTL-signalen naar het fNIRS-systeem stuurde om de opnames van de hersenactiviteit te markeren en, indien nodig voor het experiment, signalen naar het robotbesturingssysteem stuurde om bewegingsondersteuning te starten.
