First, it is shown how the accelerations registered near the CoM of the individuals can be used to characterize the consequent GRFs. The results are discussed here for a walking individual3. Fully comparable observations are made when rhythmical human activities, i.e., jumping and bobbing, are considered. Figure 7A and 7B show that the amplitude spectrum of the continuous vertical foot forces and the corresponding acceleration levels registered near the CoM of the pedestrian are qualitatively highly similar, i.e., in shape and frequency. The average pacing rate of the activity can be identified as the frequency of the first dominant peak in these spectra. Analysis of the registered GRFs and accelerations of the CoM shows that the same average pacing rate is in this way identified up to ±0.1%. Subsequently, the timing of nominally identical events is identified from the GRFs and the accelerations near the CoM, respectively. This procedure is illustrated in Figure 8 where the GRFs and the accelerations of the CoM are normalized to the weight of the person and gravity of Earth (g = 9.81 m/sec²), respectively. Analysis of the different trials shows that in this way, the period of each cycle and, thus, the time-variant pacing rate of the activity, can be identified from the accelerations of the person's CoM with a 95% confidence interval that is lower than 3% in comparison to the one as identified from the registered GRFs (see Table 1)3. Accounting in addition for the start time of the initial loading cycle, allows to compute the onset of all loading cycles.
Next, this information is applied to simulate the GRFs using the PediVib toolbox8. Figure 9 visualizes small quantitative and qualitative differences between the measured and simulated vertical single-step foot forces. These small dissimilarities are the result of applying a generalized single-step load model as defined in literature9 and could be minimized by applying the averaged vertical single-step foot force of the considered person for the corresponding walking speed. However, direct force measurements are generally not available for the persons involved in the experiments in situ. In addition, in comparison to small variations in the pacing rate, the sensitivity of the induced structural response to small variations in force amplitude or contact time can be considered neglegible3,11. Figure 9 also shows that the timing of the footsteps, and therefore, the time-variant pacing rate, is accurately identified from the registered motion of the pedestrian. Figure 10 presents the amplitude spectrum of the simulated and measured GRFs. In contrast to the perfectly periodic forces that are exclusively composed of the harmonics of the step frequency, the small variations in pacing rate result into a distribution of forces around the dominant harmonics12,13. By taking into account the identified variable pacing rate, these narrow band forces are also present in the simulated forces (Figure 10). Two scalar quantities are subsequently used to represent the similarity between the amplitude spectrum of the measured  and the simulated forces
and the simulated forces  : (1) the linear rank or correlation
: (1) the linear rank or correlation  [-] which varies between 0 and 1 and for which 1 reflects a perfect correlation, and (2) the normalized 2-norm [%]:
[-] which varies between 0 and 1 and for which 1 reflects a perfect correlation, and (2) the normalized 2-norm [%]:
The amplitude spectra are compared in the frequency range relevant for low-frequency civil structures (0-10 Hz). Figure 10 shows that a high correlation coefficient of more than 0.96 is found. Assuming the walking behavior to be perfectly periodic, results into a linear correlation of less than 0.5. The normalized 2-norm is approximately 20%, where this remaining discrepancy is primarily the result of applying a generalized single-step load model. For reference purposes it is noted that when the GRFs are simulated with the identified average single-step walking load, the correlation increases up to 0.99 and the corresponding 2-norm with respect to the actual registered forces decreases to less than 8 percent. In this way, analysis of the different trials shows that simulations based on the generalized load models and the identified time-variant pacing rate, allow for a good approximation of the imperfect real GRFs induced by the human motion.
In addition to the characterization of the individual induced loads, the time synchronization of the wireless motion trackers allows to analyze the synchronization rate among the participants. The synchronization rate  [-] is defined as:
[-] is defined as:
where Ts [sec] is the period of the activity and Δts [sec] is the time shift between the cycles of different participants. This synchronization rate is only relevant when comparable load cycles are involved. The time shifts Δts are therefore only considered for the cycles occurring within the relevant time window [t - ½Ts < t < t + ½Ts]. As a result, the synchronization rate can vary between zero and unity, whereby the latter depicts perfect synchronization. This procedure is illustrated for the experiments involving six pedestrians for which the same step frequency is imposed using a metronome (see Figure 5B). Figure 11A represents the identified onset of each loading cycle of every participant by a single vertical line. Coinciding lines, as observed during the first 40 sec, indicate a high rate of synchronization. Scattered lines, as observed between 50 and 60 sec of the considered trial, indicate a low rate or loss of synchronization among the participants. Similar observations can be made from Figure 11B presenting the corresponding synchronization rate and Figures 11C and 11D where the identified time-variant pacing rate is applied to simulate the induced vertical loads.
Finally, the protocol is applied to perform a detailed analysis of the vibrations induced by human activities on the Eeklo footbridge (see Figure 5). Figure 12 presents the modal characteristics of the first six modes of the structure. The experiments involve people walking3, jumping and bobbing with a pacing rate imposed by a metronome and targeted at the fundamental or second natural frequency. The response of the structure is registered using five triaxial sensors (see Figure 3 and 5B). Subsequently, the measured structural response is compared with the numerical simulations that account for the calibrated numerical model of the structure, the experimentally identified modal damping ratios and the characterized in-field pedestrian behavior.
First, the results are discussed for the experiments involving six pedestrians whose step frequency is chosen to match the first (fs = f1 = 1.71 Hz) and the second mode (fs = f2/2 = 1.49 Hz) of the structure. The pedestrians are arranged asymmetrically (all lined up one by one) or symmetrically (two by two) with respect to the longitudinal axis of the structure to maximize the excitation of the first and the second mode, respectively (see Figure 12). To illustrate the impact of the actual imperfect walking behavior of the participants, the structural response is first predicted assuming perfectly periodic walking forces. Second, intra- and inter-person variabilities are taken into account by considering the identified time-variant pacing rate and, thereby, also the true synchronization among the pedestrians.
Figure 13A presents the measured and simulated vertical acceleration at midspan for the persons walking two by two, with a pacing rate targeted at f2/2. This figure illustrates that when the walking behavior is assumed to be perfectly periodic, the structural response is overestimated by more than a factor of four. Accounting for the true imperfect walking behavior improves the agreement with the measured response significantly although the predicted vibration levels are three times larger.
Figure 13B presents the measured and simulated acceleration at midspan for the persons walking on one side of the bridge, with a pacing rate targeted at fs = f1. In this case, the registered and simulated lateral response at midspan is presented, i.e., the dominant component of the first mode. Figure 13B shows that when the moving force model is applied and perfectly periodic walking behavior is assumed, the peak value of the acceleration response is overestimated by a factor of two. A decrease in the measured acceleration is observed after about 40 sec due to a reduced synchronization of the pedestrians. A similar tendency is also reflected in the simulated response when accounting for the identified time-variant pacing rates. The latter leads to a much better qualitative agreement with the measured response that is, however, still slightly overestimated.
Figures 14 and 15 present a similar comparison of the measured and simulated structural response involving jumping and bobbing, respectively. Again, it is observed that the structural response is highly overestimated when the human-induced loads are assumed to be perfectly periodic. Accounting for the identified time-variant pacing rate leads to a much better qualitative agreement with the measured response.
The remaining discrepancy between the measured and simulated structural response may be due to errors in the model regarding (a) the structural behavior and (b) the pedestrian-induced load. Involving the structural model, the main uncertainty concerns the modal damping ratios. However, the covariance of the modal parameters as obtained from the SSI-cov14 were low and, in addition, the free decay analyses show that the modal damping ratios hardly depend on the vibration amplitudes3. Concerning the pedestrian excitation, the identified time-variant pacing rate is an approximation of the real imperfect walking behavior whereby small differences may arise due to the application of the generalized force model. The difference in amplitude between the predicted and the measured response in Figures 13-15 is striking and cannot simply result from these remaining uncertainties. It can, however, be explained by an increased damping, i.e., due to the changes in the dynamic properties of the coupled human-structure system in comparison to those of the empty structure. However, accounting for the involved time-variant pacing rates allows to quantify the remaining discrepancy that is due to these human-structure interaction (HSI) effects10,15-17. In this way, the methodology presented here provides essential input for the verification of the human-induced loads and quantification of HSI-effects.
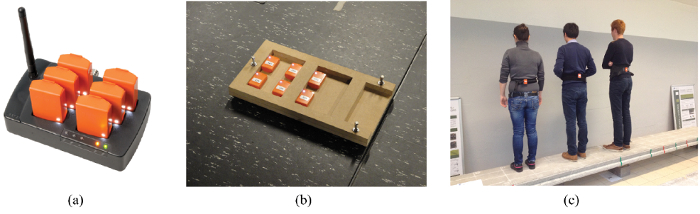
Figure 1. (A) The Xsens – Mtw Development Kit consisting of multiple wireless inertial units (MTw's)2, (B) platform designed to define the orientation reference frame, and (C) the specially designed click-in full body straps2. Please click here to view a larger version of this figure.
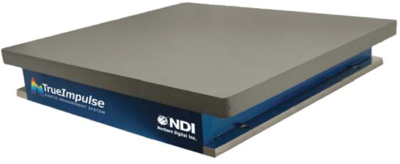
Figure 2. The force plate4 applied to register the GRFs during jumping/bobbing. Please click here to view a larger version of this figure.

Figure 3. Wireless triaxial Geosig sensors5 applied to register the structural accelerations. Please click here to view a larger version of this figure.

Figure 4. Configuration setup for the laboratory experiments involving human rhythmical experiments. Please click here to view a larger version of this figure.
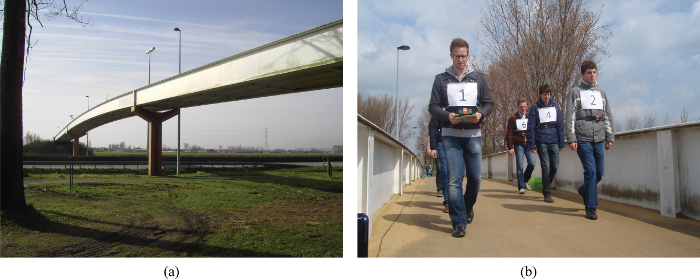
Figure 5. (A) The Eeklo footbridge and (B) synchronized walking of six participants (this figure has been modified from [3]). Please click here to view a larger version of this figure.
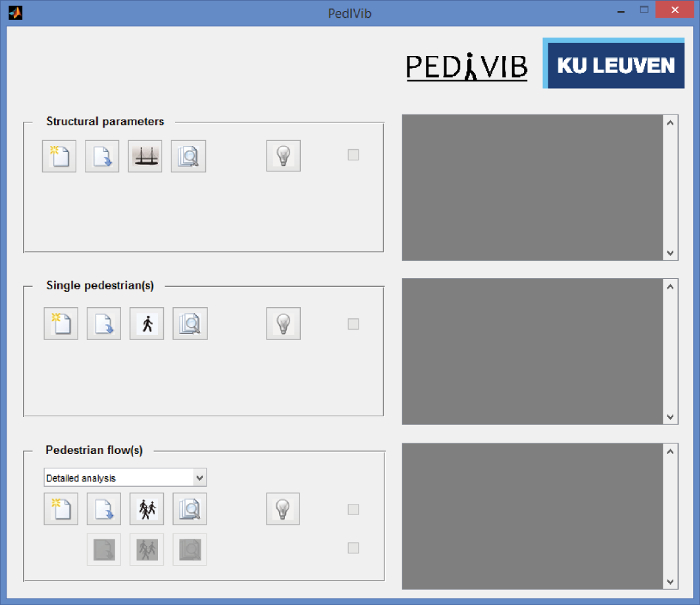
Figure 6. The PediVib Toolbox8 applied to simulate the human-induced vibrations. Please click here to view a larger version of this figure.
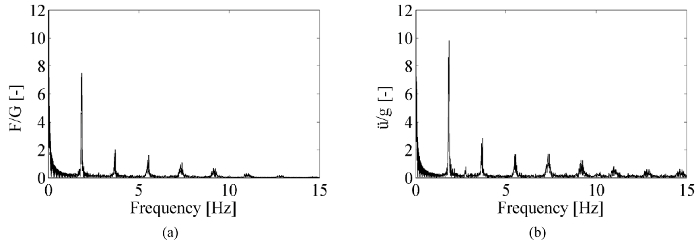
Figure 7. The linear spectrum of (A) the vertical GRFs (sum of left and right foot) and (B) the corresponding acceleration levels near the CoM (this figure has been modified from [3]). Please click here to view a larger version of this figure.
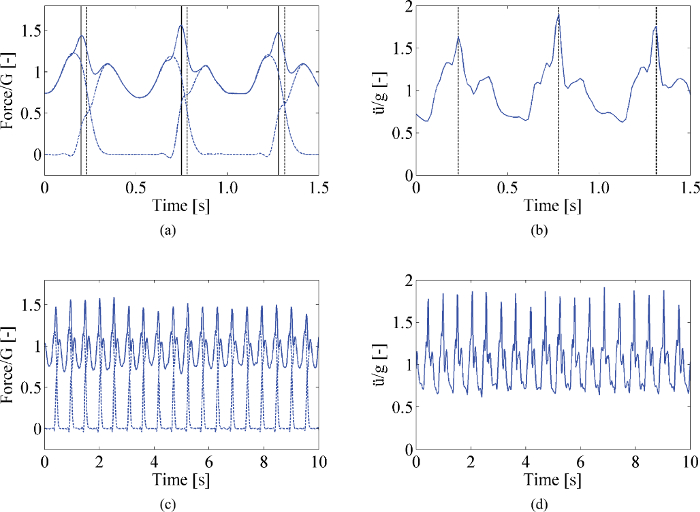
Figure 8. The normalized (A-C) vertical single step (dashed) and continuous (solid) GRFs (B-D) the normalized accelerations near the CoM and (A-B) the identified timing of nominally identical events (vertical line) from the GRFs (solid) and the accelerations near the CoM (dashed) (this figure has been modified from [3]). Please click here to view a larger version of this figure.
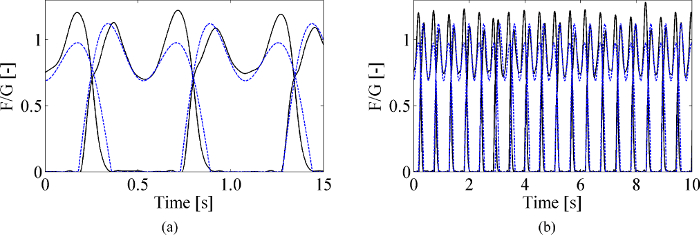
Figure 9. The normalized measured (solid) and corresponding simulated (dashed) vertical GRFs during walking (this figure has been modified from [3]). Please click here to view a larger version of this figure.
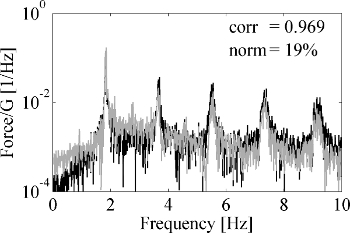
Figure 10. The amplitude spectrum of the measured (black) and simulated (grey) vertical GRFs (this figure has been modified from [3]). Please click here to view a larger version of this figure.
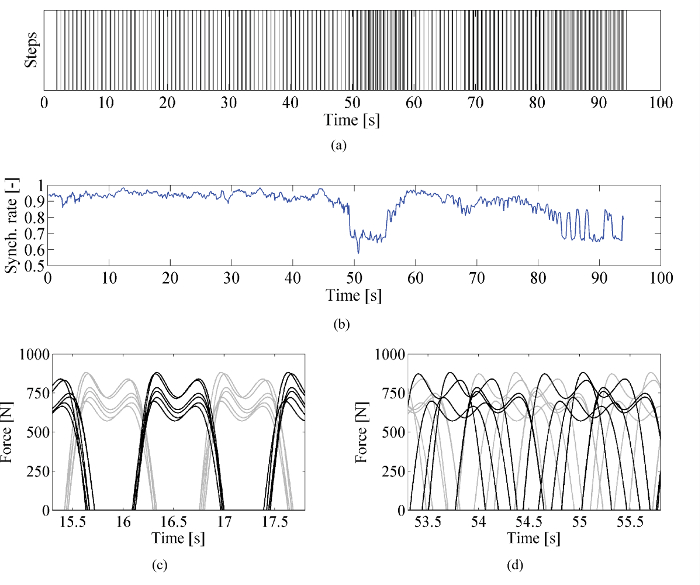
Figure 11. The identified walking behavior of six pedestrians: (A) each step of every person indicated by a single vertical line (B) the synchronization rate, and (C-D) corresponding simulated vertical forces induced by left (grey) and right (black) foot (this figure has been modified from [3]). Please click here to view a larger version of this figure.
Figure 12. The experimentally identified modal parameters of the first six modes of the Eeklo footbridge: natural frequency (fj), modal damping ratio (ξj) and mode shape: (A) mode 1 (f1 = 1.71 Hz, ξ1 = 2.3%); (B) mode 2 (f2 = 2.99 Hz, ξ2 = 0.2%); (C) mode 3 (f3 = 3.25 Hz, ξ3 = 1.5%); (D) mode 4 (f4 = 3.46 Hz, ξ4 = 3.0%); (E) mode 5 (f5 = 5.77 Hz, ξ5 = 0.2%); and (F) mode 6 (f6 = 5.82 Hz, ξ6 = 0.2%). Please click here to view a larger version of this figure.
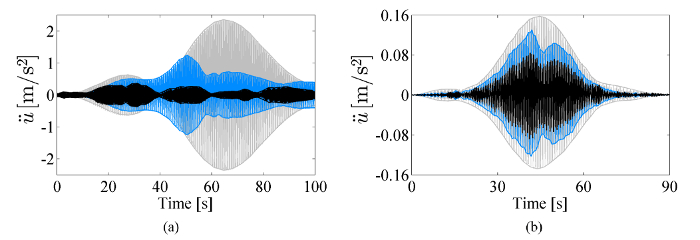
Figure 13. The accelerations at midspan for persons walking (A) two by two at a pacing rate targeted at fs = f2/2 and (B) in single file at a pacing rate fs = f1: measured (black) and predicted response without (grey) and with (blue) the in situ identified pacing rate (this figure has been modified from [3]). Please click here to view a larger version of this figure.
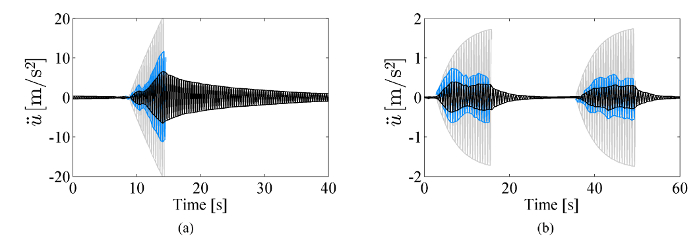
Figure 14. The accelerations at midspan for persons jumping at a pacing rate targeted at (A) fs = f2/2 and (B) fs = f1: measured (black) and predicted response without (grey) and with (blue) the in situ identified pacing rate. Please click here to view a larger version of this figure.
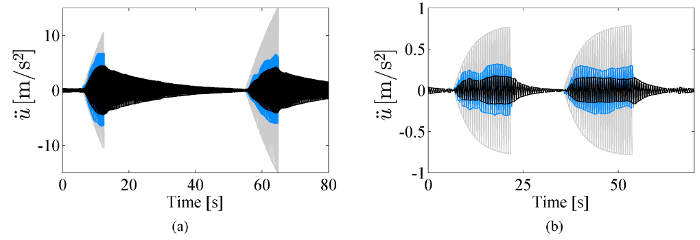
Figure 15. The accelerations at midspan for persons bobbing at a pacing rate targeted at (A) fs = f2/2 and (B) fs = f1: measured (black) and predicted response without (grey) and with (blue) the in situ identified pacing rate. Please click here to view a larger version of this figure.
| Walking speed | Step frequency | # steps | CoM |
| [km/hr] | [Hz] | [-] | 2σ [%] |
| 3.0 | 1.55 | 166 | 2.8 |
| 3.5 | 1.68 | 178 | 2.3 |
| 4.0 | 1.75 | 1.82 | 2.1 |
| 4.5 | 1.85 | 182 | 2.0 |
| 5.0 | 1.92 | 193 | 2.1 |
| 5.5 | 2.00 | 215 | 2.0 |
| 6.0 | 2.06 | 217 | 2.1 |
Table 1. For each trial: the different walking speeds, the mean step frequency, the number of registered steps and the 95% confidence interval of the identified onset of each step based on the motion registered near the CoM (this table has been modified from [3]).
