Many structural health monitoring techniques rely on changes in measured frequency response functions (FRFs) to detect damage within a structure. However, few of these methods address how to determine sensor placements and/or input force locations that will maximize the effectiveness of the method to detect damage. Embedded sensitivity functions (ESFs) can be used to determine the sensitivity of an FRF to a local change in a structure's material properties. Therefore, because damage typically results in a local change in stiffness, damping, or mass of the structure, ESFs provide a method for determining the best sensor and force locations for FRF-based health monitoring techniques.
The purpose of this video and manuscript is to detail the data acquisition process and best practices for determining ESFs for a structure. The process includes determining various FRFs from modal impact testing, which is performed by exciting a structure with a modal impact hammer and measuring its response with accelerometers. In this work, the structure being tested is a 1.2 m residential-scale wind turbine blade. The goal of the testing and analysis is to identify sensor locations which are most sensitive to damage to the blade. These sensor locations could then be used in a structural health monitoring scheme to monitor the blade for damage.
Besides the use of ESFs to determine the most effective sensor locations to use in a structural health monitoring scheme, several optimal sensor placement algorithms can also be found demonstrated in the literature. In [Kramer], Kramer iteratively evaluates the ability of a set of sensors to observe the modes of a system. More recently, genetic algorithms 1-3 and neural networks 4 have been developed to identify optimal sensor locations. In 5, a Bayesian approach is used that takes into account the risk of different types of errors and the distribution of damage rates. In 6, a finite element model was leveraged to identify the sensor locations most likely to detect damage. In most of the sensor placement algorithms presented in the literature, data from the damaged structure, whether simulated or measured, is required. One advantage of the embedded sensitivity approach is that the sensor locations can be determined from the healthy structure.
Another advantage of ESFs is that material properties need not be explicitly known. Instead, the material properties are "embedded" in the expressions for the system's FRFs. Therefore, all that is needed to calculate ESFs are a set of measured FRFs at particular input/output locations. Specifically, the sensitivity of the FRF (Hjk) calculated from a response measured at point j to an input at point k, to a change in stiffness (Kmn) between points m and n is

where  is the ESF as a function of frequency, ω 7-9. The procedure for measuring the FRFs required to calculate the right-hand side of equation (1) is detailed in the next section and demonstrated in the video.
is the ESF as a function of frequency, ω 7-9. The procedure for measuring the FRFs required to calculate the right-hand side of equation (1) is detailed in the next section and demonstrated in the video.
Figure 1 shows a typical embedded sensitivity function. Similar to an FRF, the ESF has peaks near the natural frequencies of the structure. The higher the value of the ESF, the more sensitive the location is to damage between points m and n. Each of the thirty points tested on the wind turbine blade has a unique ESF. These ESFs can be compared to determine which sensor location would be most sensitive to damage. For example, Figure 2 shows the amplitudes of the ESFs near 142 Hz. From this plot, it is clear that sensor locations corresponding to the squares in the first and third columns are most sensitive to the damage. Note that these locations are determined from data acquired from the healthy blade.
Figure 3 shows the measured difference in FRFs between the FRFs determined from data from the healthy blade and those determined from data from the damaged blade. The similarities between the difference in FRFs and the ESFs show the effectiveness of the ESFs to predict the locations at which the largest changes in FRFs due to damage will be exhibited.
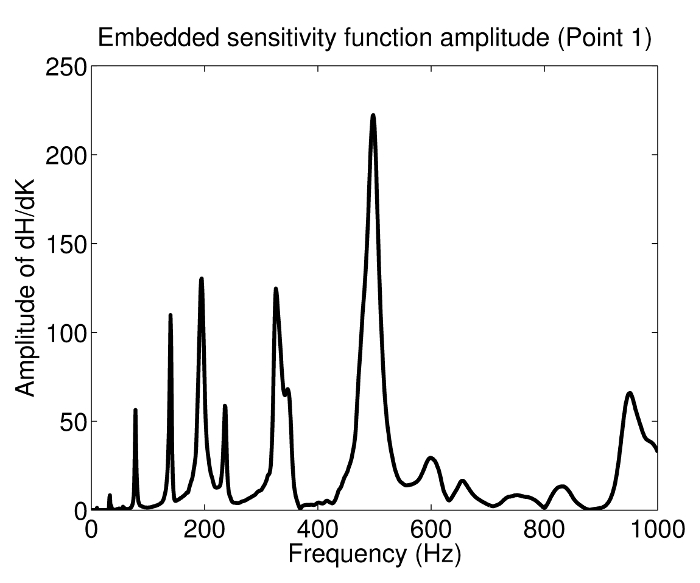
Figure 1. The amplitude of the embedded sensitivity function for point 1. The value of the ESF corresponds to the sensitivity of the FRF at point 1 to damage in the structure at the chosen location. The values change as a function of frequency. Peaks in the ESF tend to correspond to natural frequencies of the structure. Please click here to view a larger version of this figure.
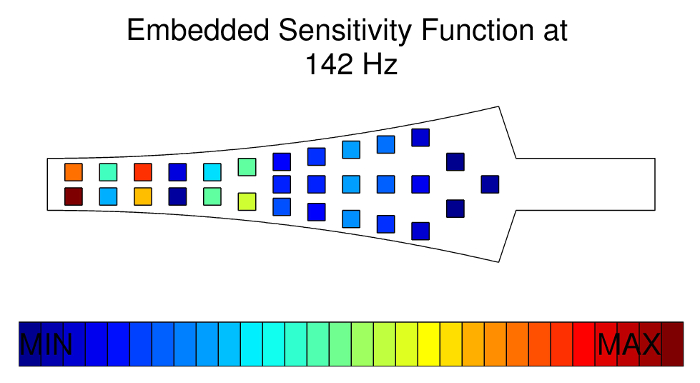
Figure 2. The amplitudes of the ESFs for all thirty points at 142 Hz. Each colored square corresponds to the value of the ESF at 142 Hz for each spatial location tested. Hot colors correspond to points at which the ESFs predict the largest change in FRF due to damage. Cooler colors indicate that the change in FRF at that point will be relatively small. Please click here to view a larger version of this figure.
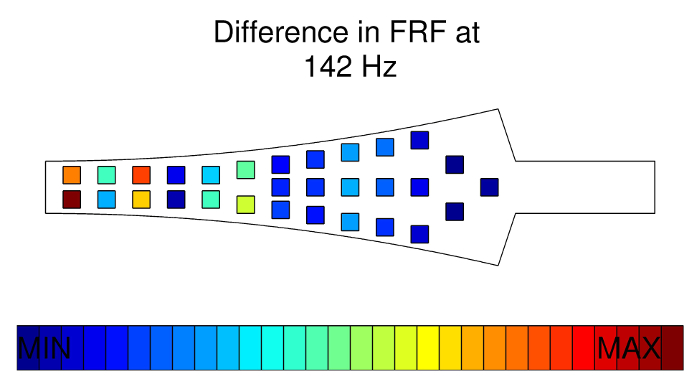
Figure 3. The difference in the FRFs, Hjk, for all thirty points at 142 Hz. The differences were calculated by subtracting the FRFs determined from the healthy and damaged blades. Hot colors indicate large differences in FRFs. Cool colors indicate small changes in FRFs. Please click here to view a larger version of this figure.
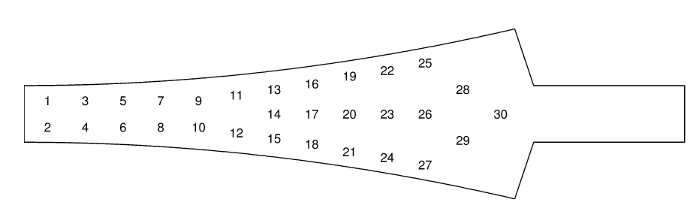
Figure 4. Impact points used during testing. Points were chosen to span the blade. Please click here to view a larger version of this figure.
