Rats acquire the skilled reaching task quickly once acclimated to the apparatus, with performance plateauing in terms of both numbers of reaches and accuracy over 1–2 weeks (Figure 5). Figure 6 shows sample video frames indicating structures identified by DeepLabCut, and Figure 7 shows superimposed individual reach trajectories from a single session. Finally, in Figure 8, we illustrate what happens if the paw detection trigger (steps 4.3.4–4.3.6) is not accurately set. There is significant variability in the frame at which the paw breaches the reaching slot. This is not a major problem in terms of analyzing reach kinematics. However, it could lead to variability in when interventions (e.g., optogenetics) are triggered during reaching movements.

Figure 1: The skilled reaching chamber.
Clockwise from top left are a side view, a view from the front and above, the frame in which the actuator is mounted (see step 1.8), and a view from the side and above. The skilled reaching chamber (1) has a door (2) cut into one side to allow rats to be placed into and taken out of the chamber. A slit is cut into the ceiling panel (12) to allow the animal to be tethered and holes are cut into the floor panel (13) to allow litter to fall through. Two infrared sensors (3) are aligned on either side of the back of the chamber. A mirror (4) is mounted above the reaching slot (14) at the front of the reaching chamber and two other mirrors (6) are mounted on either side of the reaching chamber. The skilled reaching chamber sits atop a support box (5). The high-definition camera (7) is mounted onto the support box in front of the reaching slot. Two pieces of black paper (18) are mounted on either side of the camera (7) to enhance contrast of the paw in the side mirrors (6). Below the support box is a frame (8) that supports the linear actuator (16) and pellet reservoir (9). A guide tube encasing the pellet delivery rod (10) is fit into the pellet reservoir and controlled by the linear actuator. Holes are cut into the actuator frame (17) and support box (15) above the pellet reservoir to allow the pellet delivery rod to move up and down freely. The box is illuminated with light panels (11) mounted to the cabinet walls and ceiling. Please click here to view a larger version of this figure.
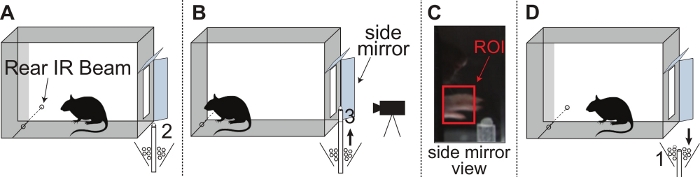
Figure 2: Single trial structure.
(A) A trial begins with the pellet delivery rod (controlled by a linear actuator) positioned at the “ready” position (position 2 – midway between floor and bottom of reaching slot). (B) The rat moves to the back of the chamber to break the infrared (IR) beam, which causes the pellet delivery rod to rise to position 3 (aligned with bottom of reaching slot). (C) The rat reaches through the reaching slot to grasp the pellet. Reaches are detected in real-time using an FPGA framegrabber that detects pixel intensity changes within a region of interest (ROI) in the side mirror view directly in front of the slot. When enough pixels match the user defined “paw intensity”, video acquisition is triggered. (D) Two seconds later the pellet is lowered to position 1, picking up a new pellet from the pellet reservoir before resetting to position 2. Please click here to view a larger version of this figure.
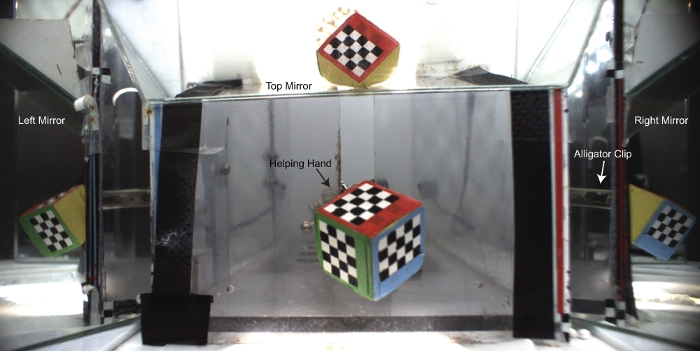
Figure 3: Sample calibration image.
A helping hand is placed inside the skilled reaching chamber. An alligator clip pokes through the reaching slot to hold the calibration cube in place outside of the reaching chamber. The three checkerboard patterns are entirely visible in the direct view and the corresponding mirror views (green: left; red: top; and blue: right). Please click here to view a larger version of this figure.
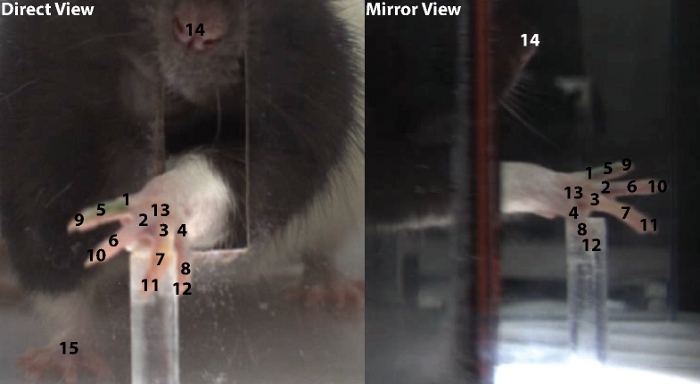
Figure 4: Learning algorithm marker positions.
Left column: direct view; right column: mirror view. Markers 1–4: MCP joints; 5–8: PIP joints; 9–12: digit tips; 13: dorsum of reaching paw; 14: nose; 15: dorsum of non-reaching paw. Marker 16 (pellet) is not visible. Please click here to view a larger version of this figure.
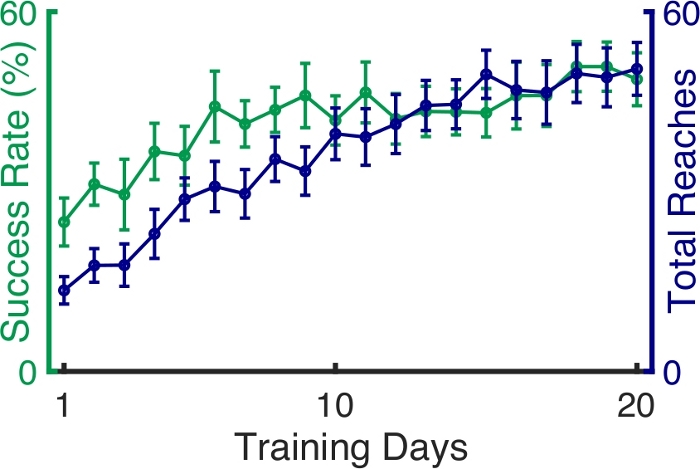
Figure 5: Rats rapidly acquire the automated skilled reaching task.
Average first reach success rate (green, left axis) and average total trials (blue, right axis) over the first 20 training sessions in the automated skilled reaching task (n = 19). Each training session lasted 30 min. Error bars represent standard error of the mean. Please click here to view a larger version of this figure.
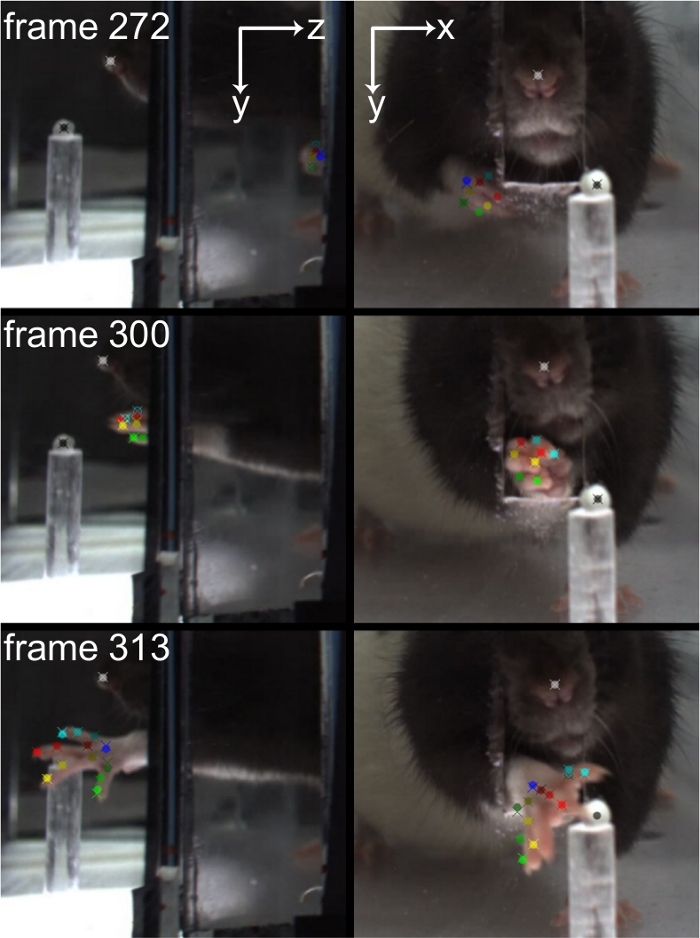
Figure 6: Sample video frames marked by the learning program.
Left column: mirror view; right column: direct view. Cyan, red, yellow, and green dots mark digits 1–4, respectively. The white dot marks the nose, the black dot marks the pellet. Filled circles were identified by DeepLabCut. Open circles mark object positions estimated by where that object appeared in the opposite view. X’s are points re-projected onto the video frames from the estimates of their 3-D locations. This video was triggered at frame 300, as the paw passed through the slot. Top images are from the first frame when the reaching paw was detected. Bottom images are from the frame at which the second digit was maximally extended. These frames were identified by the image processing software. Please click here to view a larger version of this figure.
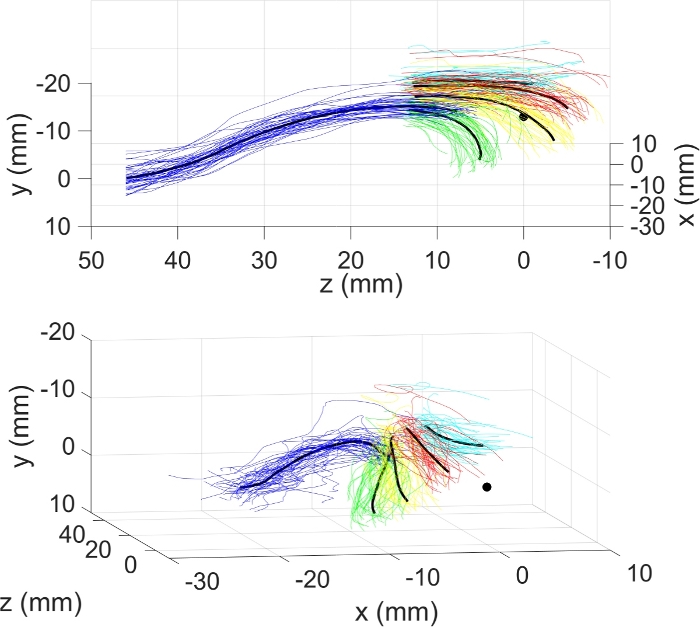
Figure 7: Sample 3-D trajectories from a single test session.
Both axes show the same data, but rotated for ease of presentation. Black lines indicate mean trajectories. Cyan, red, yellow, and green are individual trajectories of the tips of digits 1–4, respectively. Blue lines indicate the trajectory of the paw dorsum. The large black dot indicates the sugar pellet located at (0,0,0). This represents only initial paw advancement for ease of presentation (including retractions and multiple reaches makes the figure almost uninterpretable). However, all kinematic data are available for analysis. Please click here to view a larger version of this figure.
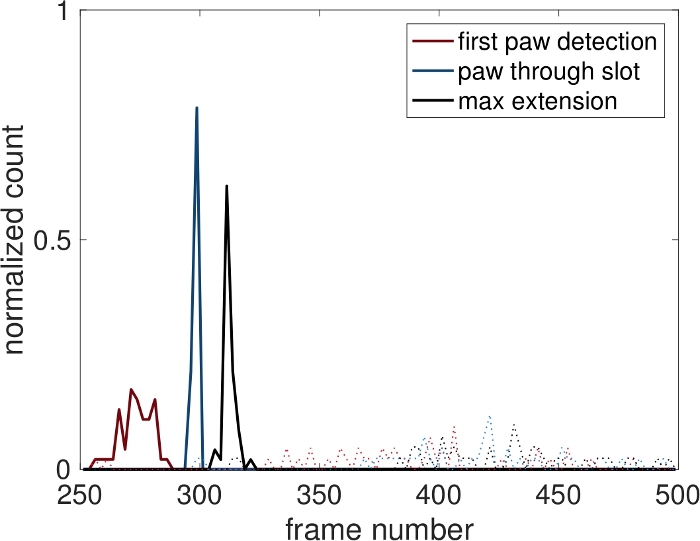
Figure 8: Histograms of frame numbers in which specific reaching phases were identified for 2 different sessions.
In one session (dark solid lines), the ROI trigger values were carefully set, and the paw was identified breaching the slot within the same few frames in each trial. In the other session (light dashed lines), the nose was often misidentified as the reaching paw, triggering video acquisition prematurely. Note that this would have little effect on off-line kinematic analyses unless the full reach was not captured. However, potential interventions triggered by the reaching paw would be poorly timed. Please click here to view a larger version of this figure.
