एक कंपन और प्रतिक्रिया बोर्ड तकनीक से नीचे घुटने कृत्रिम अंग की Inertial गुणों के आकलन के लिए प्रस्तुत किया गया था. इस प्रणाली को मान्य है और जाना जाता ज्यामितीय ठोस (परिशिष्ट ए) के Inertial गुणों का आकलन जब विश्वसनीय होना दिखाया गया था. एक) प्रत्यक्ष माप से दोलन और प्रतिक्रिया बोर्ड तकनीक का उपयोग कर, और ख) बरकरार अंगों के लिए बनाया मानक भविष्यवाणी समीकरण का उपयोग: एकतरफा, transtibial amputees के एक समूह के लिए कृत्रिम अंग अंग Inertial गुण दो मायनों में अनुमान लगाया गया था. कृत्रिम अंग के लिए जिसके परिणामस्वरूप Inertial संपत्ति का अनुमान दो दृष्टिकोणों के लिए काफी अलग थे. Inertial गुणों में यह अंतर बड़ा मतभेद स्विंग के दौरान देखा जा रहा है, चलने के दौरान संयुक्त कैनेटीक्स का काफी अलग अनुमानों में हुई.
संयुक्त कैनेटीक्स में काफी अंतर दो अलग Inertial पैरामीटर अनुमानों का उपयोग रुख दौरान हुई हालांकि, इन मतभेदों के थेप्रभावों पर विचार जब मॉल इन मतभेदों के लिए और स्विंग के दौरान मनाया मतभेद के साथ तुलना में आकार. मानव आंदोलन की सबसे अध्ययन में, रुख दौरान इन सांख्यिकीय महत्वपूर्ण मतभेद अध्ययन में परिणामों पर प्रभाव पड़ता है नहीं हो सकता है. भूमि प्रतिक्रिया बलों चलने का रुख चरण के दौरान कम सिरा जोड़ों के समग्र पल परिमाण पर एक बड़ा प्रभाव है. दोनों मॉडलों के लिए Inertial मानकों में महत्वपूर्ण मतभेद थे 17-19 हालांकि, इन मतभेदों के महत्व पर काबू पाने के लिए पर्याप्त नहीं थे रुख दौरान संयुक्त क्षण उत्पादन के लिए भूमि प्रतिक्रिया बल योगदान. मिलर 25 भी पहले कृत्रिम पक्ष की Inertial गुण चलाने का रुख चरण के दौरान कम सिरा संयुक्त कैनेटीक्स का परिमाण पर खास असर नहीं पड़ा है कि सुझाव दिया. प्रो फेरबदल हालांकि, जब मिलर 25 केवल खाते में बड़े पैमाने पर और अंग के द्रव्यमान स्थान के केंद्र में मतभेद ले लियाउलटा गतिशीलता मॉडल के लिए sthetic अंग के Inertial गुण. जड़ता के क्षण में मतभेद मॉडल के लिए जिम्मेदार नहीं थे, लेकिन यह जड़ता का क्षण दोगुनी या आधा था, भले ही यह संभावना संयुक्त पल की भयावहता पर खास असर नहीं होता है कि सुझाव दिया गया था. गति के समीकरण में Iα अवधि चलाने का रुख चरण के दौरान किसी भी बिंदु पर समग्र संयुक्त पल के लिए कम से कम 3% के लिए जिम्मेदार है. निरपेक्ष संदर्भ में, हमारे अध्ययन के लिए पल परिमाण में सबसे बड़ा परिवर्तन औसत परिमाण वृद्धि ~ 2 एन · मीटर था जहां चाल चक्र के 11% ~ पर कूल्हे पल में मनाया गया. यह लगभग चलाने का रुख चरण के दौरान मिलर 25 से मनाया गया कि परिमाण वृद्धि का आधा था. मिलर की उन के साथ संयुक्त हमारे परिणाम जड़ता के पल सहित कृत्रिम अंग जड़ता के प्रत्यक्ष उपायों, stanc दौरान कूल्हे और घुटने के जोड़ों के पल परिमाण पर केवल एक छोटा सा या नगण्य प्रभाव है कि सुझाव हैचलना या चलाने की ई चरण.
चलने के झूले चरण के संबंध में, Inertial मॉडल का चुनाव निचले छोर संयुक्त कैनेटीक्स का परिमाण पर एक महत्वपूर्ण प्रभाव पड़ता है. स्विंग के दौरान, इस तरह के रुख के दौरान जमीन प्रतिक्रिया बल के रूप में कोई बड़ा बाहरी बल, वहाँ है. अंग की गति प्रणाली में जड़ता और वर्गों के बीच बातचीत पर बहुत अधिक निर्भर है. यह दो अलग Inertial मॉडल उलटा गतिशीलता विश्लेषण में इस्तेमाल किया गया जब मनाया संयुक्त गतिज परिमाण में बड़े परिवर्तन से झलक रहा था. स्विंग के दौरान कृत्रिम अंग मॉडल पर बरकरार शरीर रचना विज्ञान पर आधारित प्रतिगमन समीकरण का उपयोग कर, एक बड़ी पेशी प्रयास कृत्रिम अंग के वास्तविक मापा Inertial गुण का उपयोग किया गया है जब से अपेक्षित था कि सुझाव दिया.
सीधे एक से नीचे घुटने कृत्रिम अंग की Inertial गुणों को मापने के लिए इस पत्र में वर्णित तकनीक कई सीमाएं हैं. हम तरीकों एक का वर्णन किया हैएन डी बाण के समान विमान का विश्लेषण करती है केवल के लिए पैरों की जड़ता संपत्ति मापन किया. इस प्रणाली में सुधार जड़ता की सभी तीन प्रमुख क्षणों मापा जा सकता है ताकि तीन अलग कुल्हाड़ियों से निलंबित किया जा सकता है कि एक आंतरिक पिंजरे संरचना बनाने में शामिल हैं. इसके अलावा, प्रतिक्रिया बोर्ड तकनीक जन की कृत्रिम अंग केन्द्र की तीन आयामी स्थान को मापने के लिए सभी तीन विमानों के लिए इस्तेमाल किया जा सकता है. Czerniecki और एक समान ऊतक घनत्व है जबकि अवशिष्ट अंग इसकी मात्रा का अनुमान लगाने के लिए पानी की एक सिलेंडर में निलंबित कर दिया है, जहां उनके सहयोगियों ने 24 से वर्णित के रूप में बड़े पैमाने पर थोड़ा और अधिक सटीक अवशिष्ट अंग का अनुमान कर सकता है कि एक और सुधार एक बड़ा आकलन का इस्तेमाल होगा अंग के द्रव्यमान का अनुमान लगाने के लिए आवेदन किया. बजाय कृत्रिम सॉकेट और पैर के बीच कुल कृत्रिम अंग जन को वितरित करने के लिए एक ग्रहण प्रतिशत का उपयोग कर के प्रत्येक घटक weighe हो सकता है तो इसके साथ ही, प्रत्येक कृत्रिम अंग टखने में disarticulated किया जा सकता हैस्वतंत्र रूप से घ. हमारी तकनीक की एक और सीमा यह एक प्रायोगिक सत्र के दौरान कुछ अतिरिक्त समय की आवश्यकता होती है. सामान्य में, सीधे कृत्रिम अंग जड़ता को मापने के लिए हमारी तकनीक का उपयोग होने की संभावना एक डेटा संग्रह सत्र के लिए आवश्यक कुल समय 30 मिनट बढ़ जाएगा.
क्योंकि बरकरार अंग जड़ता गुणों के घुटने कृत्रिम अंग के रूप में नीचे सरल प्रतिशत की Inertial गुणों के आकलन के लिए निश्चित की सिफारिशों के विकास के समान डिजाइन (यानी, ताला और पिन निलंबन और गतिशील लोचदार प्रतिक्रिया कृत्रिम पैर), के साथ नीचे घुटने कृत्रिम अंग के लिए हमारे छोटे नमूने के समस्याग्रस्त है . फिर भी, अन्य अध्ययनों 20,21,23 से नीचे घुटने कृत्रिम अंग के लिए Inertial अनुमान के साथ हमारे परिणाम के संयोजन और बरकरार अंगों के लिए अनुमान जड़ता को इन परिणामों की तुलना, कुछ संगत रुझानों से स्पष्ट हो गया है. बरकरार अंग की तुलना में, कृत्रिम ओर से बड़े पैमाने पर लगातार 30-40% से भी कम है, COM स्थान 25-35% सी हैसंयुक्त घुटने, और MOI के हारे हुए संयुक्त घुटने के माध्यम से एक अनुप्रस्थ अक्ष के बारे में 50-60% कम है.
अंत में, एक से नीचे घुटने कृत्रिम अंग की Inertial गुण मॉडल के लिए एक अक्षुण्ण टांग और पैर के लिए प्रतिगमन समीकरण का उपयोग स्विंग के दौरान संयुक्त गतिज अनुमान के परिमाण को प्रभावित करेगा, लेकिन रुख दौरान इन परिमाणों पर केवल एक छोटा या कम से कम प्रभाव पड़ेगा. इस प्रकार, शोधकर्ताओं ने कृत्रिम पक्ष मॉडल पर बरकरार अंग की Inertial गुणों का उपयोग हरकत का रुख चरण पर ही ध्यान केंद्रित कर लिए जाने की संभावना अध्ययन के निष्कर्ष में परिवर्तन नहीं होगा. हालांकि, झूले चरण कैनेटीक्स में रुचि रखने वालों के लिए, कृत्रिम अंग Inertial संपत्तियों की प्रत्यक्ष उपायों कृत्रिम पैर स्विंग का सच गतिशीलता misrepresenting से बचने के लिए विचार किया जाना चाहिए.
परिशिष्ट A
मास अनुमानों की जड़ता और केंद्र की पल की विश्वसनीयता और वैधता
विश्वसनीयता और validit आकलन करने के लिएजड़ता और जन स्थान के केन्द्र के कृत्रिम अंग पल के हमारे प्रयोगात्मक माप के वाई, दो सरल प्रयोगों का प्रदर्शन किया गया. पहले प्रयोग में, जड़ता और चार वस्तुओं का द्रव्यमान स्थानों के केंद्र के क्षणों प्रयोगात्मक तीन अलग परीक्षणों में अनुमान लगाया गया था. चार वस्तुओं थे: इलाज लकड़ी (जन = 2.8 किलो), अनुपचारित लकड़ी के 2) 9 एक्स 9 एक्स 64 सेमी ब्लॉक (जन = 2.5 किलो), 3) 7 एक्स 9 एक्स 65 का 1) 9 एक्स 9 एक्स 61 सेमी ब्लॉक सेमी अनुपचारित लकड़ी (जन = 1.8 किलो), और 8 सेमी के व्यास और 9 सेमी (जन = 0.8 किलो) की एक बाहर व्यास के साथ और अंदर पीवीसी पाइप के 4) 61 सेमी लंबा टुकड़ा के ब्लॉक. एक कंपन तकनीक 12 इसके केंद्र जन के माध्यम से एक अनुप्रस्थ अक्ष के बारे में जड़ता की प्रत्येक वस्तु के क्षण का अनुमान किया गया था. एक वस्तु वस्तु की एक निश्चित धुरी, दोलन (τ) की अवधि के बारे में झूल रहे जब कि तय अक्ष के बारे में जड़ता की वस्तु की पल के लिए आनुपातिक है. दोलन आयाम कम से कम एक तटस्थ स्थिति के सापेक्ष 5 डिग्री, है तोवस्तु की जड़ता के क्षण का अनुमान एक सरल पेंडुलम की गति के आधार पर किया जा सकता है:
 (A.1)
(A.1)
मैं दोलन अक्ष के सापेक्ष जड़ता का क्षण है अक्ष जहां, एम प्रणाली के बड़े पैमाने पर, जी गुरुत्वाकर्षण के कारण त्वरण है, और डी दोलन अक्ष और प्रणाली के द्रव्यमान का केंद्र के बीच की दूरी है.
एक प्रतिक्रिया बोर्ड तकनीक बड़े पैमाने पर स्थान की प्रत्येक वस्तु के केंद्र का अनुमान किया गया था. स्टेटिक संतुलन मान लिया गया था (Σ लम्हें = 0) और वस्तु के वजन से उत्पादित क्षणों, फ्रेम का वजन, और प्रतिक्रिया बल एक निश्चित संदर्भ अक्ष के बारे में अभिव्यक्त किया गया. जड़ता और प्रत्येक वस्तु का द्रव्यमान स्थान के केन्द्र के पल भी अनुमान लगाया सरल ज्यामितीय समीकरणों पर आधारित थे. हमारे प्रयोगात्मक उपायों इन ज्यामितीय estimatio की तुलना में थेवैधता का आकलन करने एनएस. जन स्थान और जड़ता के पल के केंद्र के लिए हमारे अनुमानों की विश्वसनीयता एकल कारक सामान्य रेखीय मॉडल ANOVAs तीन परीक्षणों को दर्शाती 3 दोहराया उपायों के साथ,, (COM आकलन के लिए एक और MOI आकलन के लिए एक) दो का उपयोग कर मूल्यांकन किया गया था. Intraclass सहसंबंध गुणांक (ICC देखने) भी हमारे अनुमानों के repeatability निर्धारित करने के लिए अभिकलन थे.
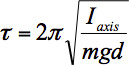
एक दूसरे प्रयोग में, हम दोलन की हमारी अवधि (τ) माप की विश्वसनीयता का आकलन किया. τ एक लकड़ी के ब्लॉक एल्यूमिनियम फ्रेम में सुरक्षित (जन = 2.8 किलो, आयाम = 9 एक्स 9 एक्स 61 सेमी) और दोनों से निलंबित साथ दोलन अक्ष और लगातार 10 परीक्षणों से निलंबित ही एल्यूमिनियम फ्रेम के साथ लगातार 10 परीक्षणों के लिए मापा गया था दोलन अक्ष. प्रत्येक परीक्षण के दौरान, τ जिसका उत्पादन में वोल्टेज विविध परिलक्षित प्रकाश की तीव्रता के आधार पर एक photocell का उपयोग लगातार 10 दोलनों के लिए मापा गया था. Τ के लिए हमारे माप की विश्वसनीयता एक था10 दोहराया उपायों के साथ, चार, एक कारक सामान्य रेखीय मॉडल ANOVAs का उपयोग ssessed. दो (फ्रेम केवल परीक्षणों के लिए एक और फ्रेम + ब्लॉक परीक्षण के लिए एक) ANOVAs τ लगातार दोलनों (कारक एक दिया परीक्षण के भीतर दोलन की लगातार अवधियों था कि इतनी यानी, डाटा मैट्रिक्स सेटअप था) के बीच मतभेद है कि क्या यह निर्धारित करने के लिए इस्तेमाल किया गया. कारक लगातार परीक्षण था और दो और ANOVAs τ लगातार परीक्षण के पार मतभेद है कि क्या निर्धारित किया गया है, ताकि फिर डेटा matrices 90 डिग्री तक घुमाया गया. Intraclass सहसंबंध गुणांक (ICC देखने) भी हमारे माप repeatability निर्धारित करने के लिए अभिकलन थे.
प्रयोग 1 परिणाम – चार वस्तुओं
जन के अपने केंद्र (I_obj_cm) के माध्यम से एक अनुप्रस्थ अक्ष के बारे में जड़ता की प्रत्येक वस्तु का क्षण लगातार प्रत्येक objectR पर आधारित अनुमानों की तुलना में (लकड़ी के ब्लॉक के लिए ~ 5% की और पीवीसी पाइप के लिए 12% ~) द्वारा overestimated गया था17; जन और ज्यामिति (iz) (3 टेबल). हमारे अनुमानों, तथापि, अत्यंत विश्वसनीय थे. जड़ता का मतलब क्षण में कोई अंतर नहीं था (एफ 2,6 = 0.154, पी = .861) तीन परीक्षणों में चार वस्तुओं के लिए. इसके अलावा, ICC देखने परीक्षण के पार जड़ता आकलन के हमारे पल (आईसीसी = 1.00) उच्च repeatable था कि पता चला. हमारे आकलन जड़ता की वस्तु के पल overestimate हो जाती थी, हालांकि इस प्रकार, ज्यामितीय अनुमान की तुलना में हमारे अनुमानों विश्वसनीय थे.
एक प्रतिक्रिया बोर्ड तकनीक का उपयोग बड़े पैमाने पर स्थान आकलन के हमारे केंद्र वर्दी घनत्व और एक ज्यामितीय मॉडल संभालने पर आधारित अनुमानों के अनुरूप था. मतभेद कम से कम 1% थे. जन स्थान का मतलब केन्द्र में कोई अंतर नहीं था (एफ 2,6 = 1.126, पी = 0.384) तीन परीक्षणों में चार वस्तुओं के लिए. इसके अलावा, ICC देखने परीक्षण के पार जन आकलन के हमारे केंद्र (आईसीसी> 0.99) उच्च repeatable था कि पता चला. इस प्रकार,जन अनुमानों के बारे में हमारी केन्द्र वैध और विश्वसनीय थे.

.. 3 तालिका जड़ता और चार वस्तुओं के लिए जन स्थानों के केंद्र के क्षणों की हमारी प्रायोगिक अनुमानों द्रव्यमान और प्रत्येक वस्तु की ज्यामिति पर आधारित अनुमानों की तुलना में तालिका के एक बढ़े हुए देखने के लिए यहाँ क्लिक करें. चर परिभाषाएँ: mframe = जन की एल्यूमिनियम फ्रेम; mobject = वस्तु की मात्रा; t_frame = केवल फ्रेम के दोलन की अवधि; दोलन की अवधि लगातार 10 दोलनों का मतलब के रूप में और लगातार तीन परीक्षणों में निर्धारित किया गया था. t_object = फ्रेम के दोलन की अवधि और एक साथ आपत्ति; t_frame के रूप में ही निर्धारित; I_Frame_osc = दोलन धुरी के फ्रेम रिश्तेदार की मैं;I_Frame_obj_osc = दोलन धुरी के फ्रेम के साथ साथ वस्तु के सापेक्ष मैं; I_obj_osc = दोलन अक्ष पर आपत्ति रिश्तेदार की मैं; जन की वस्तु के केंद्र के माध्यम से एक धुरी के बारे में वस्तु की I_obj_cm = मैं; निम्नलिखित ज्यामितीय भविष्यवाणी समीकरण का उपयोग कर वस्तु के मुख्यमंत्री के बारे में मैं के Iz = सैद्धांतिक भविष्यवाणी:
परमवीर चक्र: ![]() ; आर बाहरी त्रिज्या था जहां, आर आंतरिक त्रिज्या था, और ज लंबाई था
; आर बाहरी त्रिज्या था जहां, आर आंतरिक त्रिज्या था, और ज लंबाई था
लकड़ी: ![]() ; एक लंबाई है और ख है जहां चौड़ाई जियोमेट्रिक मुख्यमंत्री स्थान वस्तु की लंबाई के 50% के रूप में भविष्यवाणी की थी.
; एक लंबाई है और ख है जहां चौड़ाई जियोमेट्रिक मुख्यमंत्री स्थान वस्तु की लंबाई के 50% के रूप में भविष्यवाणी की थी.
2 प्रयोग के परिणाम – दोलन की अवधि (τ) आकलन
अकेले एल्यूमिनियम फ्रेम दोलन धुरी से निलंबित कर दिया और आ रहा था, τ लगातार और योजनाबद्ध तरीके (एफ = 123.25 9,81, पी <0.001) की कमी हुई पहले 10 oscil खत्मसभी 10 दोलन परीक्षण में लगभग 6 मिसे (; पैनल छोड़ दिया चित्रा 5) से रिश्तों. परीक्षण के पार, दोलन का मतलब अवधि भी काफी अलग पाया गया था (एफ 9,81 = 13.97, पी <0.001) ही फ्रेम डोलती गया था. हालांकि, ICC देखने किसी दिए गए परीक्षण के भीतर पहले 10 दोलनों अधिक τ में व्यवस्थित कमी (आईसीसी = 0.99) repeatable था कि पता चला. फ्रेम और लकड़ी के ब्लॉक (एम = 2797 छ) एक साथ आ रहे थे, τ पहले 10 दोलनों के साथ बदल नहीं किया था (एफ 9,81 = 3.031, पी = .116) और लगातार 10 परीक्षण के पार मतलब τ काफी अलग नहीं किया था ( एफ 9,81 = 3.533, पी = 0.093) (चित्रा 5, सही पैनल). फ्रेम प्लस वस्तु परीक्षण के लिए ICC देखने के लिए एक दिया परीक्षण τ भीतर दोलन से दोलन (आईसीसी = 0.17) के लिए repeatable नहीं है कि सुझाव है. इन आंकड़ों फ्रेम के लिए केवल परीक्षणों τ बेहतर त्रि की एक श्रृंखला भर पहले दोलन का एक मतलब के रूप में अनुमान लगाया गया है कि सुझाव है एक से नीचे घुटने कृत्रिम अंग के उन लोगों के लिए इसी तरह की विशेषताओं के साथ एक वस्तु डोलती है जब ए एल एस और कि, τ बेहतर लगातार दोलनों भर में मतलब के रूप में और परीक्षणों की संख्या में अनुमान लगाया गया है.
(ए) एल्यूमिनियम फ्रेम केवल और (बी) के फ्रेम और लकड़ी के ब्लॉक (ब्लॉक जन = 2.8 किलो, ब्लॉक आयाम = 9 एक्स 9 एक्स 61 सेमी) के लिए मापा दोलन की चित्रा 5. अवधि. प्रत्येक पैनल पहले 10 से 10 अलग परीक्षणों से पता चलता है प्रत्येक परीक्षण के दोलनों का प्रदर्शन किया. दोलन अक्ष (बाएं पैनल) से निलंबित ही फ्रेम के साथ, τ योजनाबद्ध तरीके से पहले 10 दोलनों से अधिक की कमी हुई. एक लकड़ी के ब्लॉक फ्रेम करने के लिए जोड़ा गया था हालांकि, जब τ योजनाबद्ध तरीके से पहले 10 दोलनों (सही पैनल) में अलग अलग नहीं किया था.
दोलन की अवधि को जड़त्व के पल की संवेदनशीलता
टी "> प्रयोग 1 से परिणाम जड़ता का एक उद्देश्य के पल के हमारे अनुमानों लगातार overestimated और प्रयोग 2 से परिणाम फ्रेम के τ पहले 10 दोलनों में, हम बढ़ाता के लिए सबसे अच्छा तरीका निर्धारित करने के लिए एक संवेदनशीलता विश्लेषण प्रदर्शन कम हो जाती है सुझाव है कि कर रहे हैं सुझाव है क्योंकि . फ्रेम केवल परीक्षण और फ्रेम प्लस वस्तु परीक्षणों (तालिका 4) τ के लिए τ एक वस्तु की जड़ता के पल के लिए आनुपातिक है: (A.2)
(A.2)
मैं दोलन अक्ष के सापेक्ष जड़ता का क्षण है अक्ष जहां, एम प्रणाली के बड़े पैमाने पर, जी गुरुत्वाकर्षण के कारण त्वरण है, और डी दोलन अक्ष और प्रणाली के द्रव्यमान का केंद्र के बीच की दूरी है. Τ कम हो जाती है, तो एम, जी, और डी एक दिया परीक्षण के भीतर स्थिरांक हैं इसलिए, क्योंकि, तब तो मैं अक्ष करता है. हम अनुमान के बाद से: के रूप में एक वस्तु की जड़ता के क्षण दोस्त
मैं = मैं + फ्रेम obj obj – अगर टहनी (A.3)
फ्रेम (मैं फ्रेम) की जड़ता के पल underestimating प्रयोग 1 में हमारे अनुमानों के अनुरूप है जो वस्तु के लिए जड़ता अनुमान का एक बड़ा पल (मैं obj), उत्पादन होगा. 6 दिखाता है फ्रेम ही दोनों के लिए प्रयोग 1 से τ चित्रा परीक्षण और lightest वस्तु और भारी वस्तु के लिए फ्रेम प्लस वस्तु परीक्षणों. यह आंकड़ा (घुटने कृत्रिम अंग नीचे जैसे,) भारी वस्तुओं के लिए पहले 10 दोलनों अधिक τ में कोई स्पष्ट कमी आई है, लेकिन हल्का वस्तुओं के लिए τ में मामूली व्यवस्थित कमी है कि दिखाता है.

तालिका 4. तुलना कादोलन की अवधि का निर्धारण करने के लिए चार अलग अलग तरीकों. इस विश्लेषण में इस्तेमाल किया वस्तु इलाज लकड़ी के 9 एक्स 9 एक्स 61 सेमी ब्लॉक था. वस्तु का द्रव्यमान और ज्यामिति के आधार पर एक विकल्प के सैद्धांतिक अनुमान की तुलना में जब हालत सी जड़ता की वस्तु के क्षण का सबसे अच्छा अनुमान का उत्पादन किया. तालिका के एक बढ़े हुए देखने के लिए यहाँ क्लिक करें. नोट: चर परिभाषाएँ 3 तालिका के रूप में वही कर रहे हैं की स्थिति. एक: t_frame और t_object 3 परीक्षण भर में लगातार 10 दोलनों के दोलन का मतलब अवधि के रूप में गणना कर रहे थे दशा बी:. t_frame और t_object 3 अलग परीक्षण के पार दोलन के पहले की अवधि की औसत के रूप में गणना कर रहे थे दशा सी:. t_frame के रूप में निर्धारित किया गया था हालत बी में; t_object दशा ए दशा विकास के रूप में निर्धारित किया गया था: t_frame में के रूप में निर्धारित किया गया थाहालत एक; t_object दशा बी के रूप में निर्धारित किया गया था
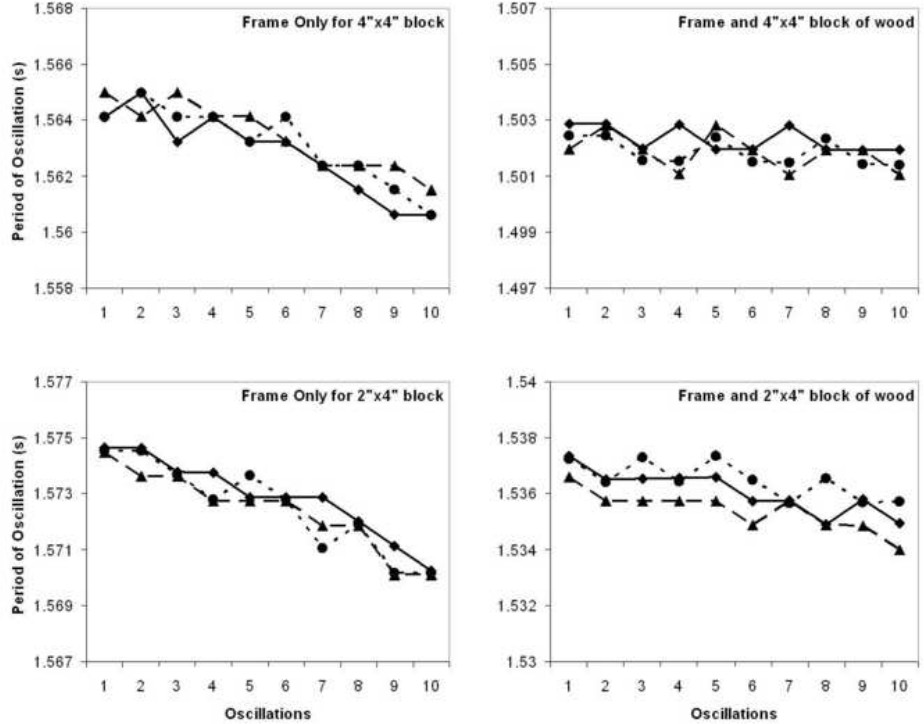
चित्रा 6. भारी और सबसे हल्का वस्तुओं के लिए दोलन की अवधि. छोड़ दिया पैनलों केवल फ्रेम के लिए तीन परीक्षणों के दोलन के पहले 10 अवधियों प्रदर्शित करें, और सही पैनल फ्रेम प्लस वस्तु परीक्षण के लिए एक ही प्रदर्शन. प्रयोग 2 के रूप में, केवल फ्रेम डोलती है जब पहले 10 दोलनों अधिक τ में एक व्यवस्थित कमी आई है. भारी वस्तु (एम = 2.797 किलो) डोलती गया था, τ में कोई व्यवस्थित कमी थी. हालांकि, τ में मामूली कमी प्रकाश वस्तु (एम = 0.716 किलो) डोलती गया था जब मनाया गया. ठेठ नीचे घुटने कृत्रिम अंग जन 1.2 से 2.1 किलो 20,21 करने के लिए सीमा को सूचित किया गया है. इस प्रकार, यहां तक कि सबसे हल्का वजन कृत्रिम अंग के लिए, τ नहीं करना चाहिएपहले 10 दोलनों के ऊपर काफी कमी दिखा रहे हैं.
समापन
अकेले एल्यूमिनियम फ्रेम डोलती है, जब दोलन की अवधि 10 दोलन परीक्षण से पहले दोलन का मतलब के रूप में निर्धारित किया जाएगा. एल्यूमिनियम फ्रेम और कृत्रिम अंग डोलती रहे हैं, दोलन की अवधि 30 दोलनों (3 परीक्षण, प्रत्येक परीक्षण के भीतर लगातार 10 दोलनों) का मतलब के रूप में निर्धारित किया जाएगा.
