Sandblæsning er et vigtigt skridt i fremstillingsprocessen, fordi den rå metaloverflade fremtrædende reflekterer endoskopet lys, hvilket gør det umuligt for de kredse, der skal detekteres. Det er vanskeligt at skelne de kredse selv med det blotte øje (se figur 5). Bemærk, at overfladen af målet vist allerede blev ætset med en laser. Det betyder dog ikke mindsker lysreflektion.
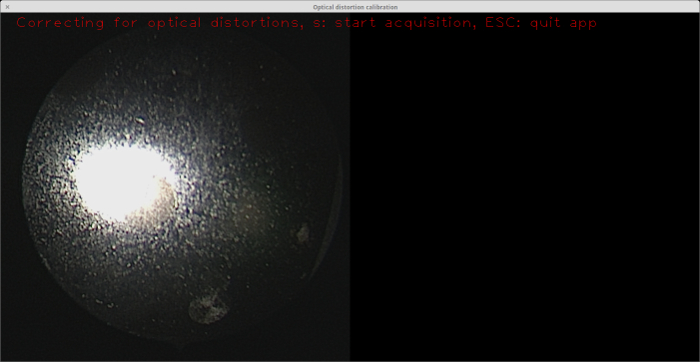
Figur 5: kalibreringsmålet uden sandblæsning anvendt. Som det fremgår af endoskopet syne på venstre, blænding fra endoskopet lys på materialeoverfladen gør det vanskeligt selv for det blotte øje at skelne cirklerne (der er en cirkel lige til den sydøstlige del af det store refleksion). Bemærk, at overfladen af dette mål (dvs. "baggrund") var allerede ætset, men dette er ikke nyttigt i fravær af sandblæsning. Klik her for at se en større version af dette tal.
Før mønster ætsning, er det også vigtigt at ætse overfladen af hele prøven. Dette er nødvendigt, fordi den sandblæste overflade har mange spejlrefleksioner (se figur 6), som interfererer med blob detektion.
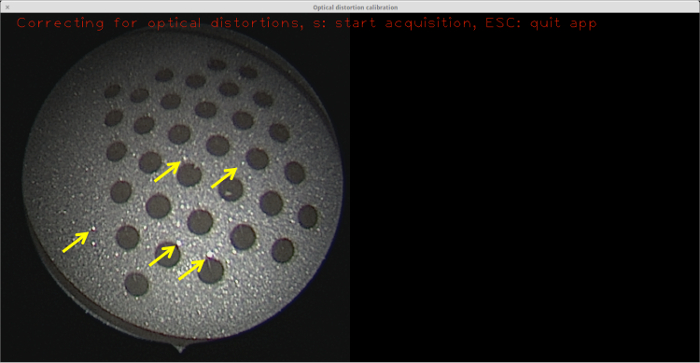
Figur 6: Sandblæst overflade uden ætsning. Selvom ikke så fremtrædende som det rå metaloverflade, de relativt små spejlrefleksioner (hvoraf nogle er fremhævet med gule pile) er stadig tilstrækkelige til at forhindre blob detektion fra lykkes, så ingen kalibrering kan udføres med dette mål.Arget = "_ blank"> Klik her for at se en større version af dette tal.
Anvendelse af laseren ved forskellige hastigheder giver forskellige baggrundsfarver. Farven baggrund spiller en væsentlig rolle i kontrasten mellem cirklerne og baggrunden. Derfor er det afgørende at bestemme den optimale baggrundsfarve. Til dette formål, en plade med cirkler ætset mod et sæt af forskellige baggrunde blev skabt (se figur 7). Baggrundene blev testet under anvendelse af funktionen detekteringsmodul af OpenCV 23, som anvendes i OpenCV kamerakalibrering modul 17. I dette arbejde blev målet af rustfrit stål, da det er den mest almindelige og pålidelige materiale, der anvendes i klinikker til medicinsk udstyr. Dette materiale er frit tilgængeligt, ikke dyre, robust og let at sterilisere. Andre materialer kan potentielt anvendes til kalibreringsmålet, såsom aluminium eller joderede metaller, men det er den SCOPe af det fremtidige arbejde.
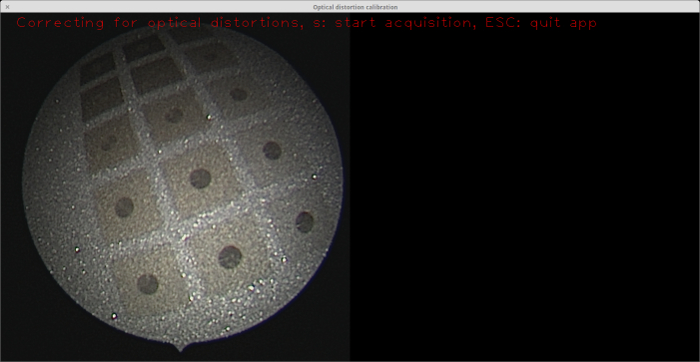
Figur 7: Rustfrit stål plade med en palet af forskellige baggrundsfarver ætset med laseren. Praktiske forsøg blev udført i forbindelse med OpenCV funktionen detekteringsmodulet til at bestemme hvilken baggrundsfarve giver det optimale resultat i form af klat-til-baggrund kontrast 23. Endoskopet udsigt til venstre viser pladen. De moderate baggrundsfarver (dvs. de andre, at de mørkeste og lyseste dem) i denne palet give bedre blob afsløring. Klik her for at se en større version af dette tal.
En af fordelene ved dette arbejde er, at udføre en kalibrering ved hjælp af fremstillede mål tager 2-3 min. Det meste af indsatsen gåes manuelt stabilisere endoskopet at opnå ordentlige visninger af kalibreringen mønster. Ved hjælp af en specialbygget endoskop indehaveren kunne fjerne behovet for manuel stabilisering, hvilket kan forkorte kalibrering tid.

Video 1: Video viser, hvordan optisk forvrængning kalibrering kan udføres ved hjælp af den udviklede kalibreringsmålet sammen med Endocal software. Klik her for at se denne video. (Højreklik for at downloade.)
En fordel ved vores arbejde i forhold til arbejdet i Wengert et al. 15 er, at der kan bruges OpenCV kamera kalibrering modul 17, som er til kalibrering, uden at kræve nogen ændring eller brugerdefinerede Parameterization. Fordi OpenCV er en veletableret og velholdt softwarepakke og er meget populær i computer vision samfund, bruger det eliminerer behovet for at skrive og vedligeholde brugerdefineret software. For at gøre læsningen lettere, er en kompakt GUI applikation billede 16, som læseren nemt kan installere og bruge til at teste nye kalibreringsmål. En ulempe ved vores metode sammenlignet med Wengert et al. 15 er, at deres metode er mere robust over for okklusioner af mønstret, som det ikke kræver påvisning af alle klatter.
Indledningsvis blev en kalibreringsmålet med et skakbrætmønster fremstillet til dette arbejde. Men denne type af kalibreringsmålet viste sig at være uegnede i forsøg på grund af vanskeligheden detektere hjørnerne af skakternede kvadrater. Hjørne afsløring afhængig histogram-baserede image binarisering (se OpenCV kildekoden 24). Denne impligger behovet for en klar farve kontrast mellem mørke og lyse kvadrater, som ikke kunne garanteres med vores skakbrætmønster, delvist på grund af spejlrefleksioner, som dem der vises i figur 6. Sådanne spejlende refleksioner er til stede selv efter baggrund ætsning; imidlertid påvisning af cirklerne synes at være mindre følsomme over for denne mangel.
I den nuværende opsætning, kun vinkelret udsigt over kalibreringsmålet tillader vellykket klat afsløring. Dette skyldes den spejlende reflektioner fra måloverfladen hæmmer blob detektion ved skæve vinkler. Vi arbejder på at forbedre målet, således at for erhvervelse af synspunkter på en bredere vifte af vinkler, som potentielt kan forbedre kvaliteten af udførte kalibreringer 20.
I realtid placenta mosaicing pipeline, der tidligere blev foreslået 11, beregningen af det transeuropæiske transportnetformation, der kortlægger billedfiler par bygger på den vellykkede påvisning og gruppering af funktioner. Optiske forvridninger, på den anden side, forårsager en gruppe af funktioner med en stiv geometri at se anderledes på tværs billeder. Som følge heraf er denne forskel fører til unøjagtigheder i de beregnede transformationer, som forårsager driver i det resulterende billede mosaikker. Fordi de mest fremtrædende optiske forvrængninger er til stede mod kanterne, er endoskopiske billeder øjeblikket beskåret til deres inderste regioner. En god korrektion for optiske forvrængninger vil potentielt give mulighed for inkorporering af en større del af hvert billede i mosaicing processen. Fordelen ved denne metode er todelt. For det første ville det øge antallet af opdagede funktioner i hvert billede, potentielt forbedre beregningen af billedet transformationer. For det andet ville det give for hele anatomiske overflade, der skal rekonstrueres i en kortere tid.
