NOTE: Matlab and Simcenter Amesim (referred to as system simulation platform hereafter) were used in this protocol and are listed in the Table of Materials. However, the proposed protocol is not limited to implementation in these two software applications.
1. Selecting and classifying the EVDP design parameters (Step 1 in Figure 2).
- Dismantle the architecture of the EVDP in Figure 1 into a piston pump unit, a ball screw, a gearbox, a PMSM, and a controller. Check the performance requirements of the EVDP.
NOTE: Particularly in this paper, the requirements included power capacity, control performance, thermal performance, lifetime, reliability, efficiency, and weight. - Summarize the size parameters and specifications of the components of the EVDP. Analyze the parameters and specifications and select those related to the specified EVDP performance requirements.
NOTE: The selected component parameters and specifications are the design parameters in the EVDP preliminary design, as shown in Table 1. Table 1 also includes the parameter classification results that were obtained through Step 1.3. - Classify the design parameters into active, driven, and empirical categories21, as listed in Table 120.
- Assign the independent parameters or specifications that are most representative of each component to the active category.
- Assign the parameters that can be derived from the active parameters to the driven category.
- Assign the other parameters that are calculated using empirical functions to the empirical category.
NOTE: The thermal resistances are the group of parameters for thermal network modeling. Each thermal path is assigned with a thermal resistance. The quantity and values of the thermal parameters are finally decided upon by the thermal network architecture.
2. Developing the estimation models of the driven and empirical parameters (Step 2 in Figure 2).
NOTE: Carry out the estimation models of the driven and empirical parameters using Matlab based on the following methods. An individual script is built for each driven or empirical parameter.
- Estimate the pump and motor-driven parameters from the active parameters using scaling laws22,23.
NOTE: The pump and motor-driven parameters are mostly geometry or weight-related, which usually meet the requirement of material and geometry similarities for using scaling laws.- Define the scaling ratio of one arbitrary component parameter x as:
 (1)
(1)
where x is the concerned parameter and xref is the corresponding parameter of a reference component. Relate the active and driven parameters to the characteristic dimension of the component as:
 (2)
(2)
where Y* is the scaling ratio of one active or driven parameter, l* is the scaling ratio of the characteristic dimension of the component, and α is the coefficient of the scaling ratio. - Relate each driven parameter of the component to the active parameter by combining the respective Equation (2) of the specific driven parameter and the active parameters.
NOTE: Some exemplified results are22,23:
 (3)
(3)
where the symbols of the equations refer to Table 1. Refer to the Table of Materials for the details of the piston pump and motor used in this protocol.
- Define the scaling ratio of one arbitrary component parameter x as:
- Estimate the driven parameters for the gearbox and the ball screw from the active parameters using component catalogs.
NOTE: The active parameters of the gearbox and the ball screw are discrete values. Continuous variation of the active parameters is not possible due to mechanism constraints or high costs. Therefore, using off-the-shelf gearboxes or ball screws is preferable.- Estimate the driven parameters of the gearbox by extracting those parameters from the gearbox datasheet that best match the defined ratio and nominal torque. Particularly in this paper, the gearhead (Table of Materials) was used for building the gearbox library in Matlab software. Use the nominal torque before the defined ratio for matching the gearbox based on the portfolio organization method of the specified gearhead (Table of Materials).
- Estimate the driven parameters for the ball screw by extracting those parameters from the ball screw datasheet that best match the defined lead and nominal load. Particularly in this paper, the ball screw (Table of Materials) was used for building the ball screw library in Matlab. Use the nominal load before the defined lead for matching the ball screw based on the portfolio organization method of the specified ball screw (Table of Materials).
- Estimate the pump, the gearbox, and the ball screw efficiencies by empirical functions.
NOTE: The efficiency parameters are not provided by the datasheets of the pump, the gearbox, and the ball screw, so they are estimated by an empirical function-based method.- Assume the pump volumetric efficiency and the pump mechanical efficiency at the nominal working point are 0.95 and 0.90, respectively. Use these two values to fit the empirical functions of the leakage and viscous friction at the nominal working point, as in Equation (4) and Equation (5)24. Then derive the coefficients, Epv and Epm of the empirical functions. As a result, use the derived empirical functions to simulate the efficiency characteristics under full working conditions:
 (4)
(4)
 (5)
(5)
where Δp is the pump pressure difference, Tpo is the temperature of the oil in the pump, Dp is the instant pump displacement, and Sp is the pump speed.
NOTE: The efficiency data at the nominal working point of the off-the-shelf pumps can be obtained from the manufacturer, even though it was not the case in this paper. Then, the efficiency data can be used instead of the assumed data to improve the fidelity. The derived coefficients, which are under the nominal working point, are further regulated according to the instant working conditions (i.e., the displacement and the temperature). - Use the maximum efficiency data of the gearbox or the ball screw to fit the viscous friction function under maximum load and maximum speed, as in Equation (6). Then, derive the viscous friction coefficient f. As a result, model the instant gearbox or ball screw efficiency as in Equation (7):
 (6)
(6)
 (7)
(7)
where Emax, Smax, and Fmax are the maximum efficiency, the maximum speed, and the maximum force of the gearbox or the ball screw obtained from the datasheet, respectively; E, S, and F are the instant efficiency, the instant speed, and the instant force of the gearbox or the ball screw during the simulation, respectively; and f is the viscous friction coefficient of the gearbox or the ball screw.
NOTE: Assume the maximum efficiency of the ball screw is 0.90 due to the absence of any efficiency-related data. Update the efficiency function of the ball screw once efficiency-related data become available.
- Assume the pump volumetric efficiency and the pump mechanical efficiency at the nominal working point are 0.95 and 0.90, respectively. Use these two values to fit the empirical functions of the leakage and viscous friction at the nominal working point, as in Equation (4) and Equation (5)24. Then derive the coefficients, Epv and Epm of the empirical functions. As a result, use the derived empirical functions to simulate the efficiency characteristics under full working conditions:
- Estimate the thermal resistance parameters. Estimate the thermal resistances for the thermal network model developed in Step 3.3. using the empirical functions from thermodynamics theory. Classify the thermal resistances into two types: forced convection and conduction.
NOTE: Define the thermal resistance between the EVDP shell and the environment as a constant value. This is because the current stage investigates the thermal characteristics inside the pump, while the detailed heat dissipation performance of the shell is the focus of the future thermal design.- Estimate the thermal conduction resistance between the solid parts using Equation (8), which is based on the scaling law23:
 (8)
(8)
where Rsst is the thermal resistance between two solid parts, and Tmn is the nominal torque of the servo motor.
NOTE: Equation (8) is used only for estimating the thermal resistance of the winding-shell thermal conduction as it is the only solid-solid contact in the thermal network model. - Estimate the thermal resistance of the forced convection between a solid part and a fluid part using Equation (9)25,26:
 (9)
(9)
where Rsft is the thermal resistance between a solid part and a fluid part; λf is the thermal conductivity of the fluid; La is the characteristic length of the heat exchange; CRe and m are coefficients depending on the Reynolds number Re; Pr is the Prandtl number; and At is the heat exchange area.
NOTE: La and other structural dimensions are estimated based on scaling laws, and the fluid velocity across the heat exchange area is instantly calculated from the simulation results of the pump flow.
- Estimate the thermal conduction resistance between the solid parts using Equation (8), which is based on the scaling law23:
3. Building the system simulation model (Step 5 in Figure 2).
NOTE: Build a multidisciplinary coupling model of the EVDP that can examine its full performance. The model architecture is shown in Figure 3, and the model is carried out in the co-simulation environment based on Matlab and the system simulation platform. Firstly, build the individual lumped model of each component or discipline. Then, assemble the component/discipline models according to Figure 3.
- Build the weight model of the EVDP in Matlab.
- Calculate the weight of the EVDP by adding up the weights of each component, which are obtained from the weight estimation models in Step 2.
- Conduct dynamic lumped parameter modeling of the EVDP in the system simulation platform.
- Build the electro-magnetic-motion model of the servo motor, the motion model of the mechanical transmission, the hydraulic-motion model of the piston pump unit, and the load torque model of the swashplate, as previously described20.
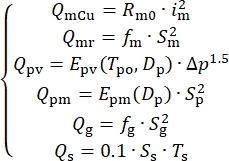
- Model the system losses as in Equation (10):
 (10)
(10)
where QmCu is the copper loss of the servo motor; Qmr is the rotor loss of the servo motor; Qpv and Qpm are the volumetric loss and mechanical loss of the pump, respectively; Qg is the gearbox loss; Qs is the ball screw loss; im is the servo motor current; Sm is the servo motor speed; Δp is the pump pressure difference; Tpo is the temperature of the oil in the pump; Dp is the pump displacement; Sp is the pump speed; fg is the viscous friction coefficient of the gearbox; Ss is the gearbox input speed; and Ts is the torque of the ball screw. - Model the fluid properties as in Equation (11). Identify the coefficients by fitting the fluid datasheet to Equation (11):
 (11)
(11)
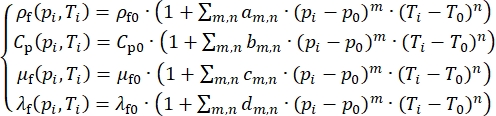
where ρf and ρf0 are the instant and reference density, respectively; Cp and Cp0 are the instant and reference specific heat, respectively; μf and μf0 are the instant and reference absolute viscosity, respectively; λf and λf0 are the instant and reference thermal conductivity, respectively; pi is the instant pressure of the ith fluid node; Ti is the instant temperature of the ith fluid node; p0 and T0 are the reference pressure and temperature of the fluid properties; and am,n, bm,n, cm,n, and dm,n are the coefficients. - Model the pressure dynamics of the fluid volumes as in Equation (12)27,28. Model the orifice as in Equation (4):
 (12)
(12)
where p is the pressure of the fluid volume; B is the fluid bulk modulus; ρ is the fluid density; V is the fluid volume; and
and  are the incoming and outgoing mass flow rate of the fluid volume, respectively; αp is the volumetric expansion coefficient of the fluid; and T is the temperature of the fluid volume.
are the incoming and outgoing mass flow rate of the fluid volume, respectively; αp is the volumetric expansion coefficient of the fluid; and T is the temperature of the fluid volume. - Model the controller using a triple loop PID controller, as in Figure 46. Tune the control parameters through several simulation trials when the simulation model and other simulation parameters are ready. Tune the control parameters from the inner loop to the outer loop by gradually increasing the gain values.
- Add a rotary spring and damper model between the driving speed source and the rotor of the pump. Add a linear spring and damper model between the input speed and the load mass of the ball screw.
NOTE: This step enables equation causality in the piston pump unit model and ball screw model. Set the spring stiffness and damper rating to constant values that can drive the effects of these two blocks ignorable.
- Conduct thermal modeling of the EVDP in the system simulation platform.
- Set a thermal network for the EVDP20. Add the thermal load in Equation (10), except for Qpv, to the corresponding thermal nodes.
- Model the thermal resistances for solid-solid heat exchange and solid-fluid heat exchange using the parameter functions in Step 2.4. Model the heat exchange of fluid-fluid nodes through exchanging their external enthalpy flow rates (refer to Step 3.3.4.)29.
NOTE: A reference thermal exchange structure and the dimensions of the EVDP are necessary for obtaining the parameters in Equation (9) based on scaling laws. The used EVDP thermal exchange structure is depicted in Figure 5. - Model the temperature dynamics of the solid thermal nodes as in Equation (13):
 (13)
(13)
where , m, and cp are the heat flow rate, mass, and the specific heat of the solid node, respectively.
, m, and cp are the heat flow rate, mass, and the specific heat of the solid node, respectively. - Model the temperature dynamics of the fluid volumes as in Equation (14)27,28:
 (14)
(14)
where p, m, cp, and αp are the pressure, the mass, the specific heat, and the volumetric expansion coefficient of the fluid node, respectively; V and h are the volumes and the enthalpy of the fluid node, respectively; and hde are mass flow rate and the enthalpy of the incoming flow, respectively; is the heat exchange rate; and Ws is the shaft work of the fluid node. - Model the temperature dynamics of the orifices as in Equation (15). This also determines the heat load effects of Qpv. Model the orifices as an ideal enthalpy transfer node, which transfers the incoming enthalpy directly to the outgoing enthalpy.
 (15)
(15)
where αp, ρ, and cp are the volumetric expansion coefficient, the density, and the specific heat of the fluid, respectively. - Model the enthalpy transfers inside the pump as in Equation (16):
 (16)
(16)
where dmhout and dmhde are the outgoing and incoming enthalpy flow rate, respectively; and Dp, Δp, and Sp are the displacement, the pressure difference, and the speed of the pump, respectively.
- For lifetime and reliability modeling, set the ball screw and the piston pump unit as the lifetime and reliability critical components. Use the smaller value of the evaluated lifetime/reliability of these two components as the EVDP lifetime/reliability performance. Carry out the models using the Matlab scripts.
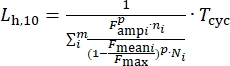
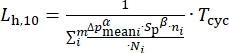
- Use the fatigue life of the ball screw as its lifetime. Use the wear life of the piston pump unit as its lifetime. Model the ball screw and piston pump unit lifetime as in Equation (17) and Equation (18)13,30:
 (17)
(17)
 (18)
(18)
where Fampi and Fmeani are the load force amplitude and mean load of the ball screw derived from the load simulation results of the ball screw using rainflow counting; Fmax is the maximum allowable load force of the ball screw; Δpmeani is the mean load pressure of the pump derived from the load pressure simulation results of the pump using rainflow counting; Sp is the pump speed; m is the quantity of the different cycles that are counted; ni is the quantity of the ith cycle; Ni is the quantity of ith cycle that can run out of the component life; Tcyc is the duty cycle duration, from which the m cycles are identified; and p, α, and β are the experimental constants.
NOTE: Ni is obtained by fitting its associated load stress, , to the linear log-log S-N curve, which is established using the maximum load data and nominal load-life data of the specific component. The log-log S-N curve can be improved when more lifetime data become available.
, to the linear log-log S-N curve, which is established using the maximum load data and nominal load-life data of the specific component. The log-log S-N curve can be improved when more lifetime data become available. - Assume the reliability of the ball screw and the pump corresponding to its lifetime is 0.90. Define the reliability as calculated at the 50,000th working hour. Model the ball screw and piston pump unit reliability as in Equation (19)13:
 (19)
(19)
where Rref is the reference reliability at the reference lifetime Lh,10 and Lh,10 spec is the specified working time to evaluate the reliability.
- Use the fatigue life of the ball screw as its lifetime. Use the wear life of the piston pump unit as its lifetime. Model the ball screw and piston pump unit lifetime as in Equation (17) and Equation (18)13,30:
- Assemble the model.
- Place all the necessary equations (introduced from Step 3.1-3.4) of each node in Figure 3 together to form the model block for each node. Conclude the input and output variables of each node.
NOTE: Take the theoretical piston pump node as an example; it involves five equations: the driving torque considering the mechanical losses, the output flow without considering leakage (leakage is modeled separately by the orifices), the displacement variation according to the displacement control motion, the enthalpy transportation, and the load torque produced by the swashplate. The derived inputs are the driving speed, the pressure and temperature at the two ports, and the swashplate displacement. The derived outputs are the shaft angle, the load torque of the driving shaft, the output flow, the output enthalpy, and the load torque produced by the swashplate. - Define the inputs and outputs of the overall EVDP model and perform the causality analysis of all the nodes. Add extra nodes when necessary to ensure that all the nodes are causally linked. Then, connect all the nodes to form the overall model of the EVDP, as in Figure 3.
NOTE: The three fluid path nodes and two inner port nodes in Figure 3 were added to ensure the compatibility of the overall model causality. They are modeled as the orifices (Equation [4]).
- Place all the necessary equations (introduced from Step 3.1-3.4) of each node in Figure 3 together to form the model block for each node. Conclude the input and output variables of each node.
4. Partial model verification (Step 5 in Figure 2).
NOTE: Use an EVDP prototype and its test rig to verify the modeling method in Step 3. Step 4 (model verification) was performed in this paper because the EVDP was newly developed, and the models were newly proposed. The EVDP prototype used in this paper was downsized compared to the one simulated in Step 5. The models validated based on the downsized prototype are considered applicable for simulating the same type of EVDP in other sizes. For future modeling and simulation tasks during preliminary design of the same type of EVDP, Step 4 can be omitted.
- Conduct experimental setup.
- Build an EVDP prototype according to the schematics in Figure 1. Adapt the existing components to form the sub-components of the EVDP, such as the piston pump unit, the gearbox, the ball screw, and the servo motor.
NOTE: a 7-piston pump featuring 7.4 mL/rev displacement was used for building the prototype in this paper. The maximum inclination of the swashplate was 18°. The nominal speed was 7000 rev/min, and the nominal pressure was 21 MPa. The ball screw lead was 1.59 x 10-3 m, and the gearbox ratio was 2.47. The EVDP prototype is shown in Figure 6. - Install the EVDP on a test rig consisting of a loading part and a control part31, as shown in Figure 7. Connect the three EVDP ports to the hydraulic circuit of the loading part. Connect the EVDP electric cables to the control part.
- Build an EVDP prototype according to the schematics in Figure 1. Adapt the existing components to form the sub-components of the EVDP, such as the piston pump unit, the gearbox, the ball screw, and the servo motor.
- Conduct prototype testing.
- Start the auxiliary hydraulic power (9) by pushing the start button on the panel.
- Set the displacement of the EVDP to 2.5° in the textbox of the displacement command using the UI. Energize the mode valve (10) and tune the load control valves (12) to 3.5 MPa load pressure using the panel. Read and record the output flow of the EVDP from the panel.
- Set the EVDP displacement to -18°, -15°, -12°, -10°, -8°, -5°, -2.5°, 2.5°, 5°, 8°, 10°, 12°, 15°, and 18°, respectively. Record each output flow of the EVDP under each set displacement, as shown in Figure 8A.
- Set the EVDP displacement at 2.5° and adjust the load pressure to around 3.3 MPa, 5 MPa, 8 MPa, 10 MPa, 13 MPa, 15 MPa, 17 MPa, 18 MPa, 19 MPa, 20 MPa, and 21 MPa, respectively. Record the output flow of the EVDP under each pressure. Set the EVDP displacement at 5°, 8°, and 18°, respectively, and repeat the pressure setting of the 2.5° displacement test for each new displacement. Record the EVDP output flow under each testing point, as shown in Figure 8B.
- Deactivate the mode valve (10) by pushing the button on the panel. Set the sweeping frequency displacement command (from 0.02 Hz to 20.5 Hz at 2.5° amplitude) to the EVDP in the textbox of the UI. Record the EVDP displacement response and derive its magnitude and phase characteristics, as shown in Figure 9A.
- Analyze the experimental results.
- Set the active parameters of the EVDP prototype to the built model in Step 3. The model generates other required simulation parameters automatically. Set the environment temperature and initial EVDP temperature at 40 °C. Run the simulation model under the same conditions as in the EVDP prototype test in Step 4.2 and record the simulation results.
- Plot the experimental results and simulation results of each condition group in the same figure, as shown in Figure 8 and Figure 9.
NOTE: The maximum flow simulation error (2.2 L/min) happened at 2.5° displacement, which was 4.35% of the full EVDP flow. The simulation results of the frequency characteristics achieved good consistency with the experimental results under 10 Hz commands and showed higher errors over 10 Hz commands. The simulation accuracy was satisfactory.
NOTE: The higher errors of the frequency characteristic simulation results over 10 Hz commands in Figure 9A arose from the parameter generation tools of the proposed model package. The simulation results achieved good accuracy when using real prototype parameters, as shown in Figure 9B. The parameter generation tools resulted in errors because the reference components used for estimating the parameters were not in the same series as the components of the prototype (in-house components were used for the EVDP prototype). Therefore, the simulation errors are not a concern when the selected components are in the same series as the reference components, but parameter uncertainties are also discussed in Step 5.
5. Simulation analysis (Step 5 in Figure 2).
NOTE: Perform the simulation analysis of the EVDP design option previously obtained by performing Steps 3 and 4 (optimization design) in Figure 2. Break down the simulation process, as shown in Figure 10.
- Set active parameters and simulation settings.
- Use a set of previously obtained active parameters of the EVDP for the first simulation, where the EVDP nominal speed is 7000 rpm, the EVDP nominal pressure is 28 MPa, the maximum EVDP displacement is 12.3 mL/rev, the servo motor nominal voltage is 28 VDC, the servo motor nominal torque is 0.386 Nm, the gearbox is omitted, the ball screw nominal force is 5460 N, and the ball screw lead is 0.005 m.
- Use GJB1177-1991 15# aerospace hydraulic fluid as the working fluid in the simulation. Set the environment at a critical temperature of 70 °C. The heat exchange coefficient between the EVDP shell and the environment is constant at 20 W/m2/K.
- Set the duty cycle20. Add a fluid heat sink to collect the EVDP return flow and supply flow to the inlet of the EVDP.
NOTE: The heat sink emulates the downstream components in the real application. It contains 10 L fluid with a 5 m2 heat exchange area, which maintains a 50 W/m2/K heat exchange coefficient with the environment. The strong heat dissipation of the fluid heat sink is used for dissipating all the EVDP output power as the EVDP output power is all converted into heat by the load control valve. - Set the design parameters to ranges that cover the design space for performing the sensitivity analysis. Use the gearbox ratio as the exemplified parameter in this paper. Set the gearbox ratio range as 1-3.5 to investigate the effects of using continuous varying values for the gearbox ratio.
NOTE: The range of the gearbox ratio was set by using the last series number as the lower bound and using the next series number as the upper bound. In this way, the effects of using continuous varying values of the gearbox ratio could be analyzed. As ratio 1 (not using gearbox) was the optimized gearbox ratio, the last series gearbox ratio did not exist. The lower bound of the range had to be 1 in this study. Ratio 3.5 did not need to be simulated again because it was already compared with the ratio of 1 in the previous optimization design and was discarded. At last, ratios 2 and 3 were selected for the sensibility analysis. Size the other components to comparable EVDP displacement control performance once the new gearbox ratio is defined to ensure a fair comparison32. - Set the design parameters to ranges that cover their tolerances to perform the uncertainty analysis. Use the servo motor torque constant and the moment of inertia of the servo motor as the exemplified parameters in this paper. Set the range of the servo motor torque constant and the moment of inertia of the servo motor as 1 – 20% and 1 + 20% of their estimated values to check their estimation error effects on the EVDP frequency characteristics33.
- Run the simulation.
- Set the dynamic model and thermal model proposed in Step 3 (implemented in the system simulation platform) according to Step 5.1.2. Click on Parameter Mode > TFFD3-1 > filename for simple fluid characteristic data to import the oil property file. Click on Parameter Mode > THGCV0-1/THGCV0-2 > Temperature of the Fluid to set the environment temperature at 70 °C. Click on Parameter Mode > THGCV0-1/THGCV0-2 > Convective Heat Exchange Coefficient to set the environment temperature at (20 W/m2/K) / (50 W/m2/K).
- Input the active parameters in Step 5.1.1. to the parameter estimation models (implemented using Matlab) proposed in Step 2. Click on EDITOR > Run to run the script for generating all the necessary simulation parameters, as shown in Table 2.
NOTE: The control parameters are obtained as illustrated in Step 3.2.5. rather than being automatically generated. - Click EDITOR > Run in Matlab to run the script for calculating the weight and activating the dynamic and thermal models with the simulation parameters. The simulation results are automatically obtained by this script.
- Click EDITOR > Run in Matlab to run the script for calculating the EVDP lifetime and reliability performance from the saved simulation results.
- Click Simulation Mode in the system simulation platform to check the simulation results. Derive other EVDP performance results from these time-domain simulation results (e.g., the swashplate control accuracy and bandwidth, the EVDP working temperature, the EVDP efficiency, and the EVDP power level).
- Click Parameter Mode in the system simulation platform to set the simulation parameters specified in Steps 5.1.4. and 5.1.5. Click EDITOR > Run in Matlab to run the script for activating the dynamic and thermal models.Click Simulation Mode in the system simulation platform to check the simulation results of the sensitivity and uncertainty analyses.
This section presents the results obtained from performing all the protocol steps, which constitute part of Step 1, all of Step 2, and all of Step 5 of the EVDP preliminary design method in Figure 2. The input information in the protocol includes the EVDP schematics in Figure 1, the optimized active parameters (clarified in Step 5.1.1.) of the EVDP from Step 4 of Figure 2, and the EVDP performance simulation tasks, which relate to the EVDP design requirements. The results of the protocol are the final preliminary design results of the EVDP, including the values of the EVDP design parameters and the predicted EVDP performance under these design parameters. Particularly, the parameter estimation models built in protocol Step 1 and Step 2 produce the results of the design parameters. Protocol Step 3 and Step 4 produce the simulation model for the final examination of the EVDP. Protocol Step 5 predicts the EVDP performance under the specific design parameters. These are clarified below in detail.
The parameter estimation results based on the active parameters in Step 5.1.1. are shown in Table 2. These parameters were sufficient for running the simulation model proposed in Step 3. Also, they will be distributed to the component manufacturers to be used as the component requirements. Subsequently, the EVDP mass was obtained easily by adding the separate component weights together, resulting in 10.82 kg.
After performing Step 5.2.2. using the aforementioned parameters and settings, the raw dynamic and thermal simulation results were obtained. Figure 11 presents the temperature dynamics of different EVDP parts, which strongly support the thermal performance evaluation of the selected EVDP design. The results indicate the highest fluid temperature (175 °C) was at the drain volume, which outlines the future thermal design requirements. The fluid in the leakage line (drain, transmission, and motor) displayed a temperature wave, which was mostly caused by the different leakage flow rates. Therefore, the leakage should not only be considered in the efficiency design but also the thermal design. The solid parts demonstrated a much slower thermal constant, but they did not change the EVDP temperature significantly as the generated heat and the solid mass were not comparable with the fluid side.
Figure 12A illustrates the EVDP efficiency under a full duty cycle. Under the full load condition (first 3 s), the EVDP achieved a total efficiency of around 80%, which is defined as output fluid power / (shaft input power + servo motor input power). The efficiency dropped significantly when the load decreased. This is because the EVDP always runs at its nominal speed, which causes continuous friction losses, but the absolute losses of the EVDP dropped (from 8.4 kW to 2.3 kW) along with the efficiency decrease in Figure 12A. These are common characteristics of most power transformation devices (i.e., partial load conditions result in lower efficiency but the absolute losses also decrease), so they do not cause concern about the EVDP performance. The 80% efficiency in the full load condition of the EVDP is basically a satisfactory result. It is also worth noting that the efficiency results fluctuated at 2-3 s. During this period, the power of the input shaft and the electro-mechanical displacement control part were at a comparable level (1 kW). Furthermore, the electro-mechanical displacement control part showed fast change and recuperation of the power consumption within this period due to the high internal pressure dynamics of the EVDP. Therefore, according to the efficiency definition, the efficiency at this period fluctuates significantly, even be beyond the 0%-100% range.
The sweeping frequency response (2.5° amplitude from 8 Hz to 20 Hz) examines the EVDP dynamic performance. As shown in Figure 12B, the swashplate inclination followed the command well during the sweeping frequency range (-0.3 dB, -43° as the lowest), which indicates more than 20 Hz of EVDP bandwidth. The high dynamic performance was easily obtained due to the low inertia control apparatus design of the EVDP (i.e. the electro-mechanical control device). This shows the dynamic advantages of variable-displacement EHA using the EVDP compared to the variable-speed EHA. The variable-speed EHA needs to dynamically rotate the high inertia main shaft of the motor-pump, which was found to be a big challenge in the studied application (35 kW power level).
Finally, Step 5.2.3. and Step 5.3. transform the raw simulation data into the projected performance of the EVDP, complying with the specification style, as shown in Table 3. A good control accuracy (0.09 degree error) was predicted. The pump lifetime and reliability were found to be the weakest, and these are specified in Table 3. Then, a full performance picture was drawn for the previously designed EVDP, which represents a significant output of this preliminary design.
The results in Table 4 were obtained after simulating the settings in Step 5.1.4. The gearbox was dismissed in the previously designed EVDP (gearbox ratio of 1). This simulation confirmed that a customized gearbox ratio between 1-3.5 (minimum off-the-shelf gearbox ratio) may be helpful. The servo motor was sized to an optimum value once a new gearbox ratio was used. Then, a fair comparison between the different gearbox ratios was achievable. The results showed that ratios 2 and 3 could achieve some accuracy and weight advantages, but not at a significant level, so it is not necessary to select the customized gearbox, considering its benefits may not compensate for its cost.
The parameter uncertainty effects of the servo motor torque constant and the moment of inertia are displayed in Table 5. The 20% uncertainty of these two parameters did not cause major variation in the EVDP control performance. This indicates that 20% tolerance of these two parameters is acceptable for the final servo motor specifications; this is also an important instruction for the component manufacturers. The uncertainty analysis should also be performed on other uncertain parameters.
In conclusion, the design parameters and the EVDP performance were obtained by performing the protocol. Furthermore, the sensibility analysis and robustness analysis further enhance the confidence and applicability of the design results. These constitute the preliminary design results of the EVDP. The proposed method enables a practical EVDP preliminary design method by developing the parameter estimation models and multi-domain EVDP simulation model. The quality of the design results has been improved and the design cycle has been shortened. These benefits strengthen the EVDP's competence, in addition to providing their own technical advantages.
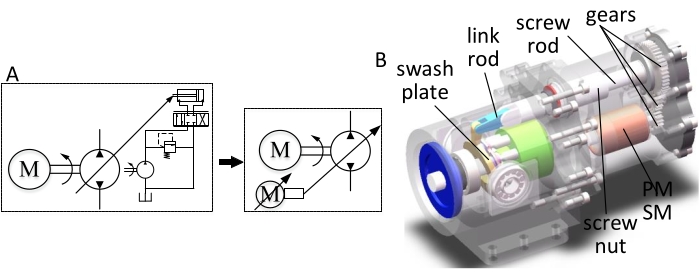
Figure 1: The EVDP concept. (A) The schematics transferring the conventional variable displacement pump into the electro-variable displacement pump. (B) A structure illustration of the EVDP. Please click here to view a larger version of this figure.
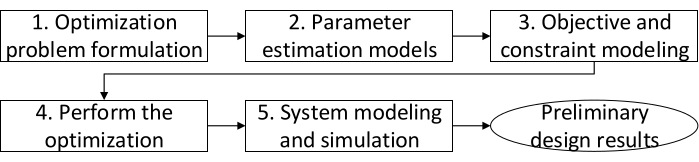
Figure 2: The preliminary design process of the EVDP. The EVDP architecture and design requirements are taken as input, and the system-level sizing and the preliminary design performance results are the outputs. The process consists of two major steps: optimization design and verification by simulation. The parameter estimation models strongly support the two steps. Please click here to view a larger version of this figure.
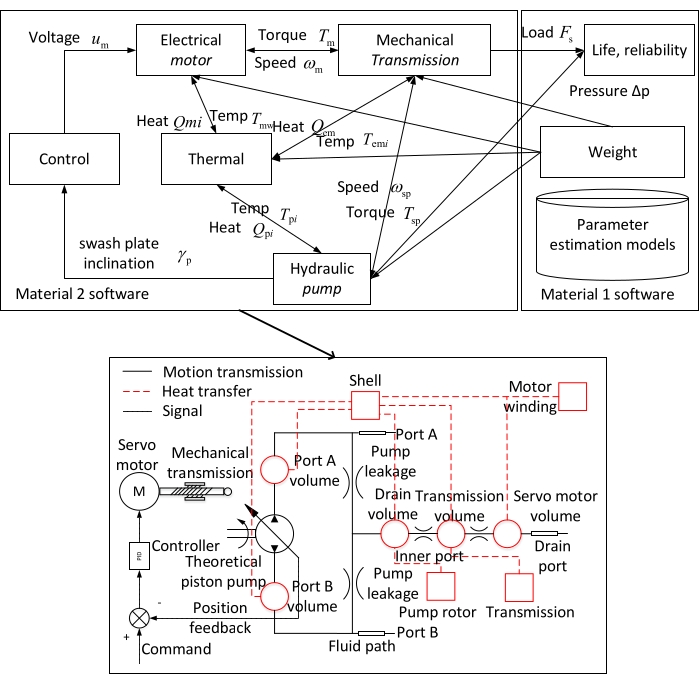
Figure 3: The multidisciplinary coupling model architecture of the EVDP. This model is used for the final design verification in the preliminary design. The disciplines are coupled for evaluating all the general design requirements at a high level of fidelity. The model is developed in a co-simulation platform using an object-oriented method. Particularly, the model involves the parameter generation function to address the challenge of parameter acquirement. Please click here to view a larger version of this figure.
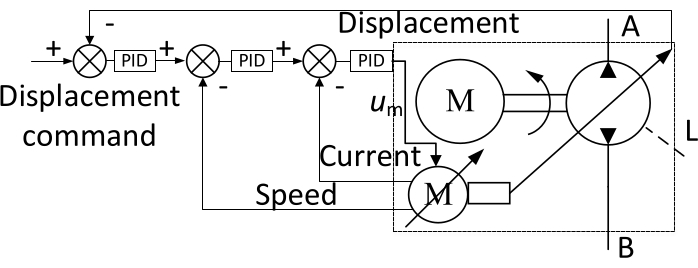
Figure 4: The controller of the EVDP. A triple loop PID controller is used for the EVDP displacement control, where the inner loop is the servo motor current control, the middle loop is the servo motor speed control, and the outer loop is the EVDP displacement control. The EVDP main shaft is driven at a constant speed. Please click here to view a larger version of this figure.
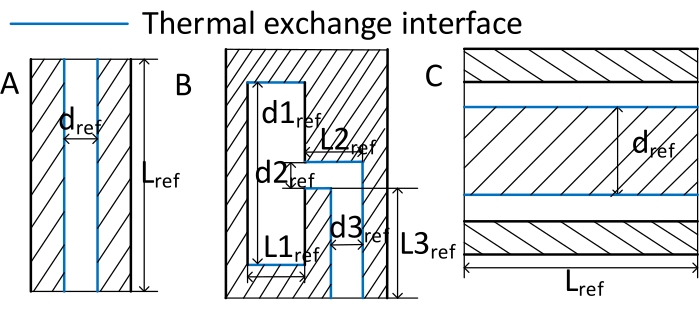
Figure 5: The reference EVDP thermal exchange structure for estimating the parameters in Equation (9) based on scaling laws. (A) Thermal exchange structure of the two ports.(B) Thermal exchange structure of the drainage volume. (C) Thermal exchange structure of the pump rotor assembly. EVDPs of different sizes all refer to these same thermal exchange structures. Then, the thermal exchange-related dimensions of different EVDP designs can be calculated based on scaling laws. The thermal exchange coefficients can hereby be calculated using Equation (9). Please click here to view a larger version of this figure.
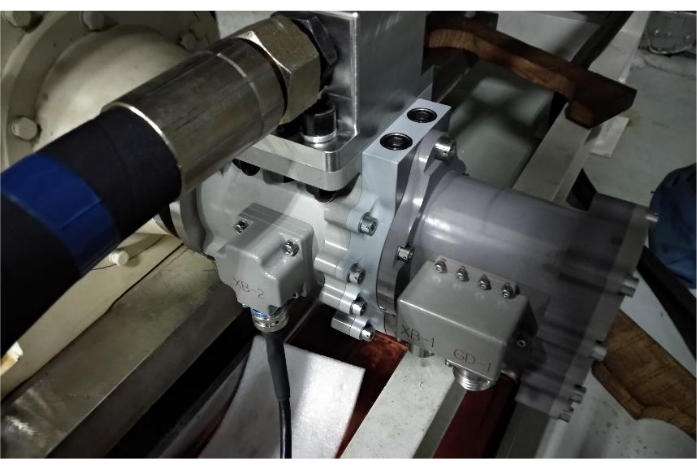
Figure 6: The tested prototype of the EVDP. The prototype is built according to the schematics in Figure 1, with parameters of 7.4 mL/rev displacement, 7000 rev/min nominal speed, 21 MPa nominal pressure, 1.59 x10-3 m ball screw lead, and 2.47 gearbox ratio. Please click here to view a larger version of this figure.
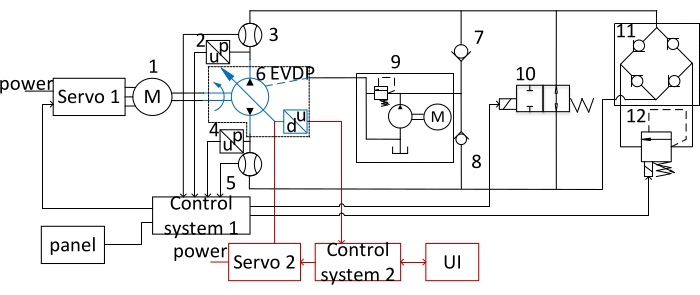
Figure 7: The test rig of the EVDP. The black lines are the loading part of the test rig. The red lines are the control part of the test rig. The blue lines are the EVDP prototype. 1. Driving motor, 2. Pressure sensor, 3. Flowmeter, 4. Pressure sensor, 5. Flowmeter, 6. EVDP prototype, 7. Check valve, 8. Check valve, 9. Auxiliary hydraulic power, 10. Mode valve, 11. Check valve group, 12. Pressure control valve. Please click here to view a larger version of this figure.
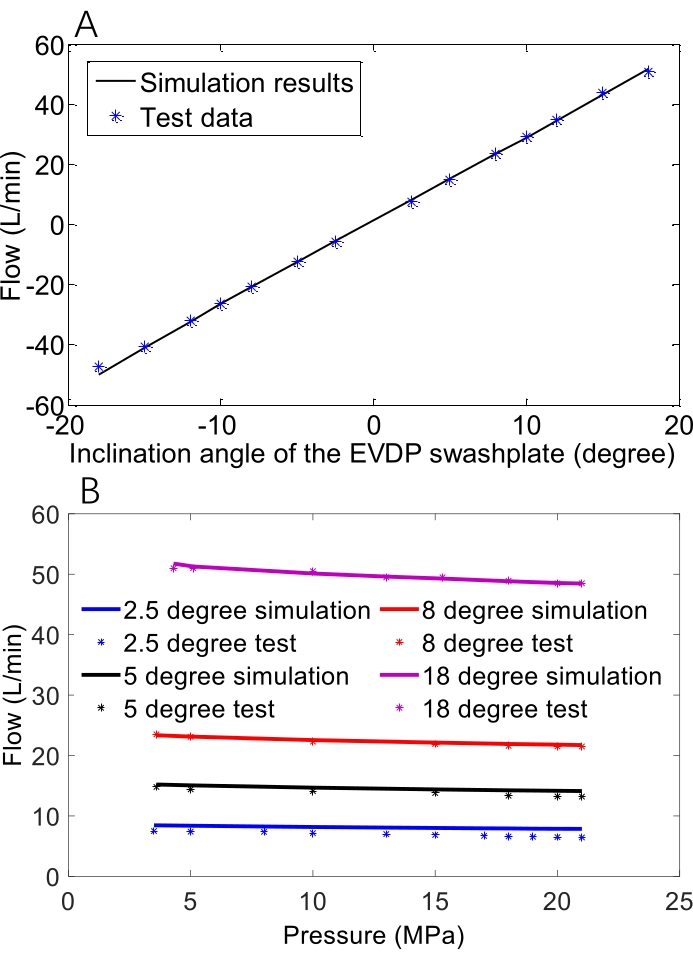
Figure 8: Experimental and simulation results of the EVDP flow responses. (A) The flow responses under different swashplate inclination conditions at constant 3.5 MPa load pressure. (B) The flow responses under different swashplate inclination and load pressure conditions. Please click here to view a larger version of this figure.
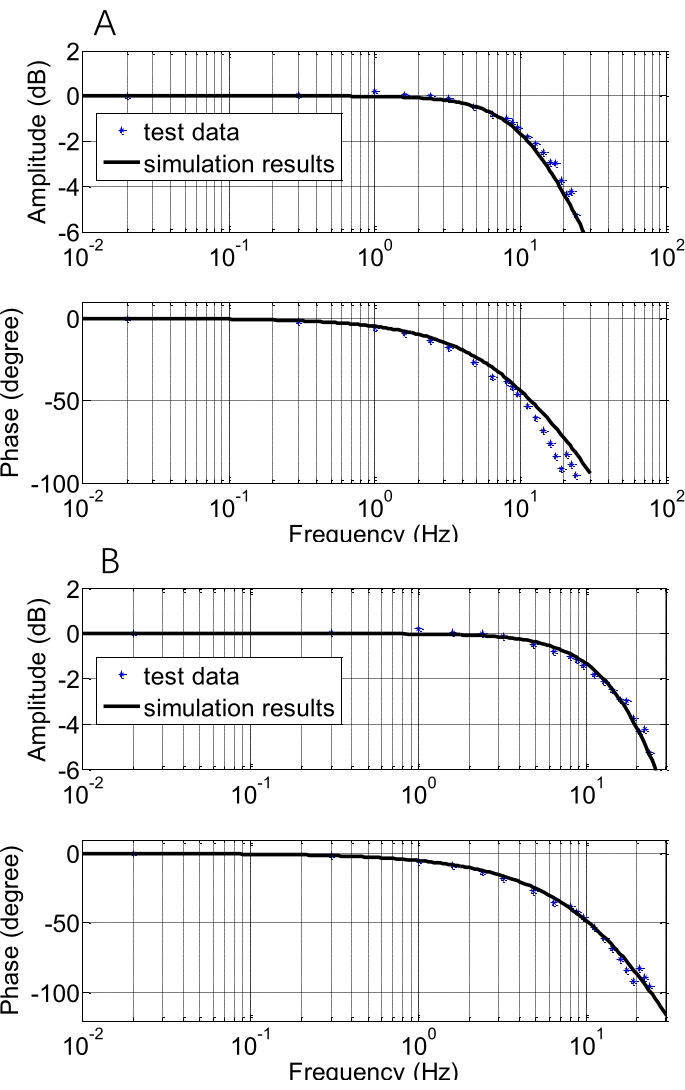
Figure 9: Experimental and simulation results of the frequency characteristics of the swashplate inclination control. (A) The comparison results when the simulation model uses automatically generated parameters. (B) The comparison results when the simulation model uses the real parameters of the prototype. The results are obtained by setting the sweeping frequency command to the EVDP displacement and transforming the time domain responses into magnitude and phase responses. The magnitude and phase responses are used for illustrating the comparison results. Please click here to view a larger version of this figure.
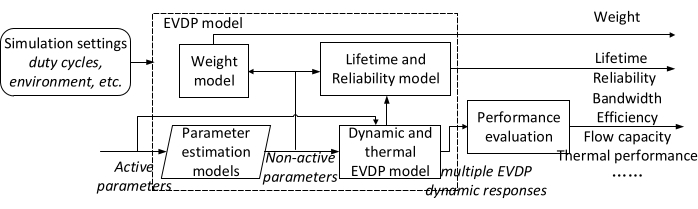
Figure 10: Simulation analysis process. This is a sub-step of Step 5 in Figure 2. Different duty cycles and the simulation object (a group of active parameters) are defined first. Then, the proposed model can be used to run the simulation. Lastly, the simulation results are derived into the EVDP specifications. Please click here to view a larger version of this figure.
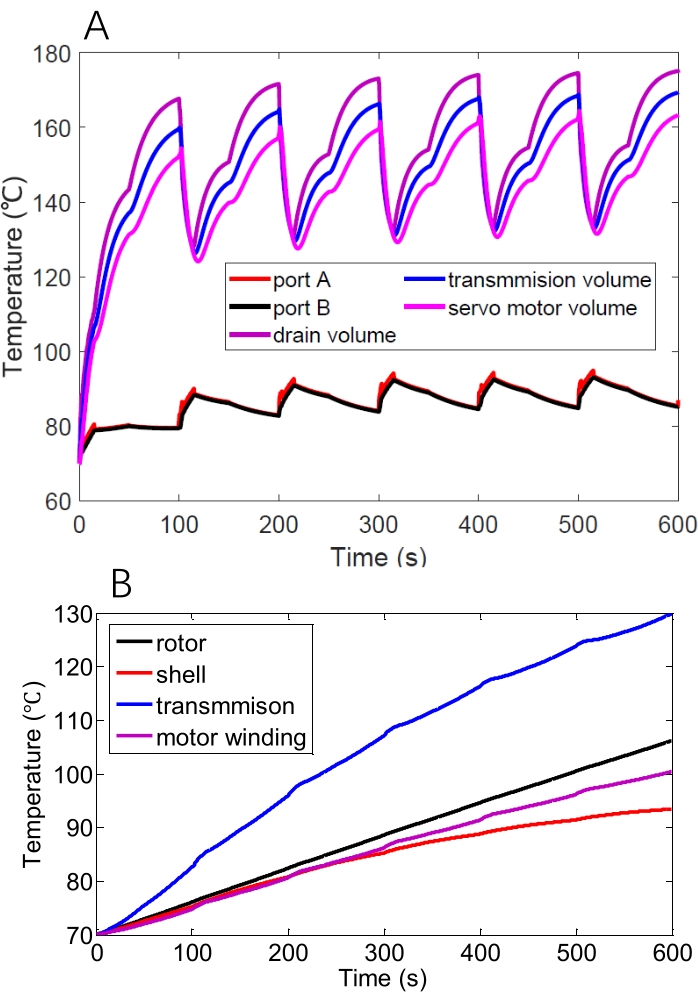
Figure 11: The simulation results of the EVDP temperature. (A) The fluid volume temperature.(B) The solid node temperature.The drain, transmission, and servo motor volumes form the leakage passage and result in higher temperatures. The two ports transport fluid from the fluid heat sink, so their temperatures are much lower. The thermal constants of the inner solid parts are quite big due to their small heat exchange coefficients, but they do not change the final EVDP temperature much because they are a small proportion of the EVDP mass and losses. Please click here to view a larger version of this figure.
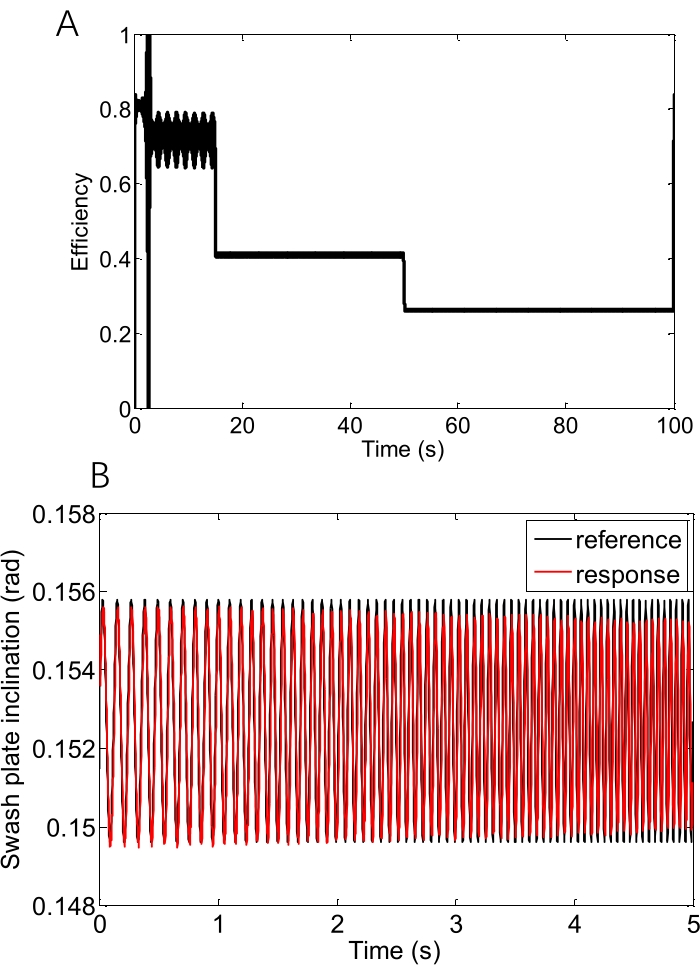
Figure 12: The EVDP efficiency and dynamic performance. (A) The EVDP efficiency under one duty cycle. (B). The EVDP responses to the sweeping frequency command. The efficiency drops along with decreases in output power. This is because the EVDP always runs at the nominal speed and hereby continuously dissipates an amount of energy, but this is not a concern for the EVDP performance because the absolute losses decrease along with the output power decreases. The EVDP swashplate follows the 8-20 Hz, 2.5° amplitude sweeping frequency command well (-0.3 dB, -43° as the lowest), indicating that the EVDP displacement control has a bandwidth greater than 20 Hz. Please click here to view a larger version of this figure.
Table 1: Classified design parameters of the EVDP. The design parameters of each component are classified into active, driven, and empirical categories. The independent parameters or specifications that are most representative of each component are the active parameters. The parameters that can be derived from the active parameters are the driven parameters. The other parameters that are calculated using empirical functions are the empirical parameters. This Table 1 is an extension of the one in Han et al.20. Please click here to download this Table.
Table 2: The parameter estimation results based on the active parameters. v is the instant fluid velocity. Some parameters are modified to a more illustrative form (e.g., the efficiency of the ball screw is modified into the viscous coefficient). These parameters are the preliminary design results and will be distributed to the component manufacturers as specifications. Please click here to download this Table.
Table 3: The designed performance of the EVDP. The raw time-domain simulation results are derived into the EVDP specifications, which are the main output of the EVDP preliminary design. Please click here to download this Table.
Table 4: The EVDP sensibility to the customized gearbox ratio. 1 is the original design value, while 2 and 3 are the compared values (customized values). The servo motor needs to be sized to an optimum value when using a new gearbox ratio so that the comparison between different ratios is fair, but a customized gearbox ratio was found to be unnecessary as the benefits were limited. Please click here to download this Table.
Table 5: The uncertainty effects of the servo motor torque constant and the moment of inertia. 20% errors of the servo motor torque constant and the moment of inertia do not show negative effects on the EVDP control performance. This indicates that a 20% tolerance of the investigated parameters can be specified for the component manufacturers. Please click here to download this Table.
