The thyroid US images were collected from two hospitals in China from September 2008 to February 2018. The eligibility criteria for including the US images in this study were conventional US examination before biopsy and surgical treatment, diagnosis with biopsy or postsurgical pathology, and age ≥ 18 years. The exclusion criteria were images without thyroid tissues.
The 3,000 ultrasound images included 1,384 malignant and 1,616 benign nodules. The majority (90%) of the malignant nodules were papillary carcinoma, and 66% of the benign nodules were nodular goiter. Here, 25% of the nodules were smaller than 5 mm, 38% were between 5 mm and 10 mm, and 37% were larger than 10 mm.
All the US images were collected using Philips IU22 and DC-80, and their default thyroid examination mode was used. Both instruments were equipped with 5-13 MHz linear probes. For good exposure of the lower thyroid margins, all the patients were examined in the supine position with their backs extended. Both thyroid lobes and the isthmus were scanned in the longitudinal and transverse planes according to the American College of Radiology accreditation standards. All the examinations were carried out by two senior thyroid radiologists with ≥10 years of clinical experience. The thyroid diagnosis was based on the histopathological findings from fine needle aspiration biopsy or thyroid surgery.
In real life, as US images are corrupted by noise, it is important to conduct proper preprocessing of the US images, such as image denoising based on wavelet transform30, compressive sensing31, and histogram equalization32. In this work, we used histogram equalization to preprocess the US images, enhance image quality, and alleviate image quality degradation caused by noise.
In what follows, true positive, false positive, true negative, and false negative are referred to as TP, FP, TN, and FN, respectively. We used mAP, sensitivity, and specificity to evaluate the model's nodule detection performance. mAP is a common metric in object detection. Sensitivity and specificity were calculated using equation (1) and equation (2):
 (1)
(1)
 (2)
(2)
In this paper, TP is defined as the number of correctly detected nodules, which have an intersection over union (IoU) between the prediction box and the ground truth box of >0.3 and a confidence score >0.6. IoU is the intersection over union, which is computed by using equation (3):
 (3)
(3)
We compared several classic object detection networks, including SSD33, YOLO-v334, CNN backbone-based Faster R-CNN27, RetinaNet35, and DETR36. YOLO-v3 and SSD are single-stage detection networks, DETR is a transformer-based object-detection network, and Faster R-CNN and RetinaNet are two-stage detection networks. Table 1 shows that the performance of Swin Faster R-CNN is superior to the other methods, reaching 0.448 mAP, which is 0.028 higher than CNN backbone's Faster R-CNN and 0.037 higher than YOLO-v3. By using Swin Faster R-CNN, 90.5% of thyroid nodules can be detected automatically, which is ~3% higher than CNN backbone-based Faster R-CNN (87.1%). As shown in Figure 2, using Swin Transformer as the backbone makes boundary positioning more accurate.
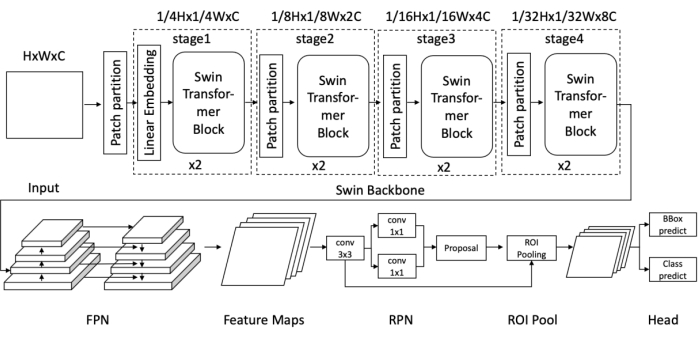
Figure 1: Diagram of the Swin Faster R-CNN network architecture. Please click here to view a larger version of this figure.
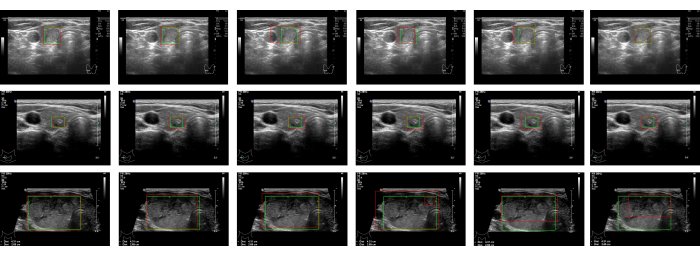
Figure 2: Detection results. The detection results for the same image are in a given row. The columns are the detection results, from left to right, for Swin Faster R-CNN, Faster R-CNN, YOLO-v3, SSD, RetinaNet, and DETR, respectively. The ground truths of the regions are marked with green rectangular boxes. The detection results are framed by the red rectangular boxes. Please click here to view a larger version of this figure.
| Method | Backbone | mAP | Sensitivity | Specificity |
| YOLO-v3 | DarkNet | 0.411 | 0.869 | 0.877 |
| SSD | VGG16 | 0.425 | 0.841 | 0.849 |
| RetinaNet | ResNet50 | 0.382 | 0.845 | 0.841 |
| Faster R-CNN | ResNet50 | 0.42 | 0.871 | 0.864 |
| DETR | ResNet50 | 0.416 | 0.882 | 0.86 |
| Swin Faster R-CNN without FPN | Swin Transformer | 0.431 | 0.897 | 0.905 |
| Swin Faster R-CNN with FPN | 0.448 | 0.905 | 0.909 |
Table 1: Performance comparison with state-of-the-art object detection methods.
Supplemental File 1: Operating instructions for the data annotation and the software used. Please click here to download this File.
Supplemental File 2: Python script used to divide the dataset into the training set and validation set, as mentioned in step 2.4.1. Please click here to download this File.
Supplemental File 3: Python script used to convert the annotations file into masks, as mentioned in step 2.5.1. Please click here to download this File.
Supplemental File 4: Python script used to make the data into a dataset in CoCo format, as mentioned in step 2.5.2. Please click here to download this File.
Supplemental File 5: The modified Swin Transformer model file mentioned in step 3.1. Please click here to download this File.
Supplemental File 6: The Swin Faster R-CNN configuration file mentioned in step 3.2. Please click here to download this File.
