En svängning och reaktionskortet teknik presenterades för att uppskatta tröghets egenskaper nedan-knäproteser. Detta system godkänts och visat sig vara tillförlitliga vid uppskattningen tröghets egenskaper kända geometriska fasta ämnen (Bilaga A). Protes lem tröghets egenskaper för en grupp av ensidiga, transtibial amputerade beräknades på två sätt: a) genom direkt mätning med hjälp av svängning och reaktions ombord tekniker, och b) med hjälp av standard prediktionsekvationer skapats för intakta lemmar. De resultetröghetsfastighets beräkningar för protes var väsentligt olika för två tillvägagångssätt. Denna skillnad i tröghets fastigheter medförde signifikant olika uppskattningar av gemensamma kinetik under gång, med större skillnader observeras under svingen.
Trots stora skillnader i joint kinetik inträffade under hållning med hjälp av de två olika tröghets uppskattningar parameter, dessa skillnader var sgalleria vid bedömningen av effekterna storlekar för dessa skillnader och i jämförelse med skillnader observerades under svingen. I de flesta studier av mänsklig rörelse kan dessa statistiskt signifikanta skillnader under hållning inte påverka resultaten i studien. Markreaktionskrafter har en stor inverkan på den totala momentmagnituderna av nedre extremiteterna lederna under ståfasen av promenader. 17-19 Även om det fanns signifikanta skillnader i tröghets parametrar för båda modellerna, inte dessa skillnader var tillräckligt för att övervinna vikten av markreaktionskraften bidrar till den gemensamma stunden produktionen under hållning. Miller 25 också tidigare föreslagit att tröghets egenskaper protes sidan hade liten effekt på storleken på de nedre extremiteterna gemensamma kinetik under ståfasen av löpning. Men Miller 25 bara tog hänsyn till skillnaderna i massa och masscentrum placering av lem när förändra prosthetic lem s tröghets egenskaper för invers dynamik modell. Skillnader i tröghetsmoment redovisades inte i modellen, men det föreslogs att även om tröghetsmoment fördubblades eller halveras skulle det sannolikt ha liten effekt på storleken av den gemensamma stunden. Den Iα termen i ekvationen för rörelsen stod för mindre än 3% av den totala gemensamma ögonblick vid varje given tidpunkt under ståfasen av löpning. I absoluta tal var den största förändringen i ögonblicket storlek för vår studie observerade i höftleden stund på ~ 11% av gångcykeln där den genomsnittliga ökningen magnitud var ~ 2 Nm. Det var ungefär hälften av ökningen storleksordning som observerades av Miller 25 under belastningsfasen av löpning. Våra resultat i kombination med de av Miller antyder att direkta mått på protes tröghet, inklusive tröghetsmoment, har endast en liten eller försumbar effekt på de gemensamma ögonblick magnituder i höft och knä under stance etappen av promenader eller löpning.
När det gäller svängfasen av promenader, valet av tröghets modell har en betydande inverkan på storleken av nedre extremiteten gemensamma kinetik. Under swing, det finns ingen stor yttre kraft, som t.ex. markreaktionskraften under hållning. Rörelsen av lemmen är mycket mer beroende av trögheten i systemet och växelverkan mellan segmenten. Detta återspeglades av de stora förändringarna i joint kinetiska storheter som observerats när de två olika tröghets modeller användes i inversa dynamik analysen. Med hjälp av regressionsekvationer baserade på intakt anatomi att modellera protes under svingen, föreslog att en större muskelkraft krävdes än när de faktiska uppmätta tröghets egenskaper protesen användes.
Den teknik som beskrivs i detta dokument för att direkt mäta tröghetsegenskaperna hos en nedanför-knäprotes har flera begränsningar. Vi har beskrivit metoder för ennd gjorde tröghet fastighetsmätningar i benen bara för sagittalplanet analyser. Förbättringar av detta system inkluderar att skapa en inre bur struktur som kan hängas från tre olika axlar så att alla tre huvudtröghetsmoment kunde mätas. Dessutom kan reaktionskortet teknik användas för alla tre plan för att mäta den tredimensionella placeringen av protesen masscentrum. En annan förbättring som skulle kunna göra beräkningar av den kvarvarande lemmen massan något mer exakt skulle vara att använda en volymmässig bedömning som beskrivs av Czerniecki och kollegor 24 där stumpen är suspenderade i en cylinder av vatten för att uppskatta volymen medan en enhetlig vävnad densitet är tillämpas för att uppskatta den lem massa. Dessutom istället för att använda en antagen procentsats för att fördela den totala protesmassan mellan proteshållare och fot, varvid varje protes skulle kunna disarticulated vid ankeln så att varje komponent kan vara weighed oberoende av varandra. En annan begränsning av vår teknik är att den kräver en del ytterligare tid under en försöksperiod. I allmänhet kommer att använda vår teknik för att direkt mäta protesen trögheten sannolikt lägga 30 min till den totala tid som krävs för ett datainsamlingssession.
På grund av vår lilla urval av under-knee proteser med liknande design (dvs., lås och stift suspensioner och dynamisk elastisk respons protes fot), utveckla definitiva rekommendationer för att uppskatta tröghets egenskaper nedan knä proteser som enkla procentsatser av intakta lem tröghets egenskaper är problematisk . Trots att kombinera våra resultat med tröghets beräkningar för nedan-knäproteser från andra studier 20,21,23 och jämföra dessa resultat till tröghet uppskattningar för intakt lemmar, några konsekventa trender blivit uppenbart. Jämfört med intakt lem, är massan av protessidan konsekvent 30-40% mindre, är det COM plats 25-35% cförlorare till knäleden, och MOI är 50-60% mindre kring en tvärgående axel genom knäleden.
Sammanfattningsvis kommer med hjälp av regressionsekvationer för en intakt skaft och fot att modeltröghets egenskaperna för en nedanför-knä protes påverkar storleken av gemensamma kinetiska beräkningar under svingen, men kommer att ha endast en liten eller ringa påverkan på dessa storheter under hållning. Således, för endast forskare med fokus på hållning rörelsedelsfas använda tröghets egenskaper för intakt lem att modelprotessidan kommer sannolikt inte ändra slutsatserna i studien. Men för dem som är intresserade av svingfasen kinetik, direkta åtgärder av protesen trögheter bör beaktas för att undvika att förvränga den verkliga dynamiken i benprotes swing.
Bilaga A
Tillförlitlighet och giltighet av tröghetsmoment och tyngd Uppskattningar
För att bedöma tillförlitligheten och validity av våra experimentella mätningar av protesen tröghetsmoment och masscentrum läge blev två enkla experiment. I det första experimentet var tröghetsmoment och masscentrum platser för fyra objekt experimentellt beräknades i tre separata försök. De fyra objekten var: 1) 9 x 9 x 61 cm block av behandlat virke (massa = 2,8 kg), 2) 9 x 9 x 64 cm block av obehandlat virke (massa = 2,5 kg), 3) 7 x 9 x 65 cm block av obehandlat timmer (massa = 1,8 kg) och 4) 61 cm lång bit av PVC-rör med och inre diameter av 8 cm och en yttre diameter av 9 cm (massa = 0,8 kg). En svängning teknik 12 användes för att uppskatta varje objekts Tröghetsmomentet runt en tvärgående axel genom dess centrum massa. När ett objekt oscillerar kring en fast axel, den svängningsperioden (τ) av objektet är proportionell mot objektets tröghetsmoment med att fast axel. Om svängningsamplituden är mindre än 5 ° i förhållande till ett neutralläge,tröghetsmoment av objektet kan uppskattas baserat på förslaget om en enkel pendel:
 (A.1)
(A.1)
där I-axel är tröghetsmomentet i förhållande till svängningsaxeln, m är massan av systemet, g är tyngdaccelerationen, och d är avståndet mellan svängningsaxeln och masscentrum av systemet.
En reaktion ombord teknik användes för att uppskatta varje objekt masscentrum plats. Statisk jämvikt antogs (Σ Moments = 0) och de moment som produceras av vikten hos föremålet, var vikten hos ramen, och reaktionskraften summeras kring en fast referensaxel. Tröghetsmomentet och masscentrum placeringen av varje objekt var också uppskattas baserat på enkla geometriska ekvationer. Våra experimentella åtgärder jämfördes med dessa geometriska estimations att bedöma giltigheten. Tillförlitligheten i våra uppskattningar för masscentrum plats och tröghetsmoment bedömdes genom att använda två (en för COM-skattning och en för MOI uppskattning), enskild faktor allmän linjär modell ANOVA, med tre upprepade mätningar som speglar de tre försöken. Intraclass korrelationskoefficienter (ICCS) också beräknas för att bestämma repeterbarhet av våra uppskattningar.
I ett andra experiment, bedömde vi tillförlitligheten hos vår svängningsperioden (τ) mätning. τ mättes i 10 försök i följd med endast aluminiumramen upphängd från svängningsaxeln och 10 försök i följd med ett träblock (vikt = 2,8 kg, mått = 9 x 9 x 61 cm) fästs i aluminiumramen och båda avstängd från svängningsaxeln. Under varje försök, var τ mäts under 10 på varandra följande svängningar med hjälp av en fotocell vars utspänning varierar baserat på det reflekterade ljusets intensitet. Tillförlitligheten i vår mätning för τ var enssessed med fyra, enskild faktor allmän linjär modell ANOVA, med 10 upprepade mätningar. Två (en för ram endast prövningar och en för ram + blockera försök) ANOVA användes för att bestämma om τ skilde mellan konsekutiva oscillationer (dvs. datamatrisen startades så att faktorn var på varandra följande perioder av svängning inom en viss rättegång). Då datamatriserna roteras 90 ° så att faktorn var i rad prövningar och två ANOVA användes för att bestämma om τ skilde över varandra följande försök. Intraclass korrelationskoefficienter (ICCS) också beräknas för att bestämma repeterbarhet av våra mätningar.
Resultat av experiment 1 – De fyra objekt
Varje objekts Tröghetsmomentet runt en tvärgående axel genom masscentrum (I_obj_cm) var genomgående överskattade (med ~ 5% för träklossar och med ~ 12% för PVC-rör) jämfört med de uppskattningar som bygger på varje objectR17, s massa och geometri (Iz) (tabell 3). Våra beräkningar var dock extremt tillförlitliga. Det fanns ingen skillnad i medeltröghetsmoment (F 2,6 = 0.154, p = 0.861) för de fyra objekt över de tre försöken. Dessutom avslöjade ICCs att i studierna vår tröghetsmoment uppskattningen var hög repeterbarhet (ICC = 1.00). Även om vår bedömning tenderade att överskatta objektets tröghetsmoment jämfört med den geometriska uppskattningen våra beräkningar var tillförlitliga.
Vår tyngdpunkt plats uppskattning med hjälp av en reaktion styrelse teknik var i överensstämmelse med uppskattningar som bygger på antagande enhetlig täthet och en geometrisk modell. Skillnaderna var mindre än 1%. Det fanns ingen skillnad i den genomsnittliga masscentrum läge (F 2,6 = 1.126, p = 0,384) för de fyra objekt över de tre försöken. Dessutom avslöjade ICCs som i studierna vår tyngdpunkt uppskattningen var hög repeterbarhet (ICC> 0,99). Sålundavårt centrum för mass uppskattningar var giltiga och tillförlitliga.

.. Tabell 3 Våra experimentella uppskattningar av tröghetsmoment och masscentrum för de fyra objekten jämfört med skattningar baserade på massan och geometrin för varje objekt Klicka här för att få en förstorad bild av bordet. Variabla definitioner: mframe = massan av aluminiumramen; mobject = massan av objektet; t_frame = svängningsperioden på endast ramen; svängningsperioden bestämdes som medelvärdet av 10 på varandra följande svängningar och över tre försök i rad. t_object = svängningsperioden för ram och objekt tillsammans; bestämdes på samma sätt som t_frame; I_Frame_osc = I av ramen i förhållande till svängningsaxeln;I_Frame_obj_osc = I i ram plus objekt i förhållande till svängningsaxeln; I_obj_osc = I av objektet i förhållande till svängningsaxeln; I_obj_cm = I av objektet runt en axel genom objektet masscentrum; Iz = teoretisk förutsägelse om jag om objektets CM med hjälp av följande geometriska prediktionsekvationer:
PVC: ![]() ; där R var yttre radie, r var innerradie, och h var längd
; där R var yttre radie, r var innerradie, och h var längd
Trä: ![]() ; där a är längden och b är bredden geometriska CM läge förutsades som 50% av objektet längd.
; där a är längden och b är bredden geometriska CM läge förutsades som 50% av objektet längd.
Bedömning Period Oscillation (τ) – Resultat av experiment 2
När ensam aluminiumramen avbröts från svängningsaxeln och svängde, τ konsekvent och systematiskt minskat (F 9,81 = 123.25, p <0,001) under de första 10 oscilloskopningar med cirka 6 msek i alla 10 svängningsförsök (Figur 5, vänster panel). I studierna, var den genomsnittliga tiden för pendling även funnit att skilja sig avsevärt (F 9,81 = 13,97, p <0,001) när bara ramen var pendlat. Dock visade ICCs att inom en viss rättegång systematisk minskning av τ under de första 10 svängningar var repeterbar (ICC = 0.99). När ramen och träblock (m = 2797 g) svängde ihop, gjorde τ inte förändras under de första 10 svängningar (F 9,81 = 3.031, p = 0,116) och medel τ över 10 studier i följd inte signifikant skiljer sig ( F 9,81 = 3,533, p = 0,093) (Figur 5, höger panel). ICCs för ramen plus objekt studier tyder på att inom en viss rättegång τ är inte repeterbar från pendling till svängning (ICC = 0,17). Dessa data tyder på att för ramen endast prövningar τ är bättre beräknas som ett medelvärde av den första svängningen över en serie av tri als och att när ett objekt med egenskaper som liknar de hos en under-knee protesen pendlade, är τ bättre beräknas som medelvärdet över varandra följande svängningar och över ett antal försök.
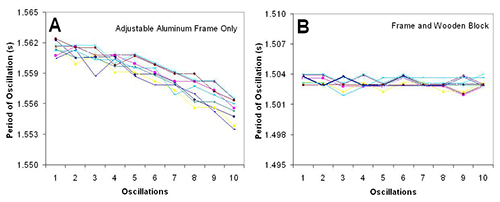
Figur 5. Period svängnings mätt för (A) aluminiumram endast och (B) ram och träblock (block massa = 2,8 kg, blockera mått = 9 x 9 x 61 cm). Varje panel visar 10 separata försök med den första 10 svängningar av varje försök visas. Med bara ramen upphängd från svängningsaxeln (till vänster), τ minskade systematiskt under de första 10 svängningar. Men när ett träblock lades till ramen, τ inte systematiskt varierar över de första 10 svängningar (högra panelen).
Känslighet för tröghetsmoment till Period Oscillation
t "> Eftersom resultaten från experiment 1 tyder våra beräkningar på ett objekts tröghetsmoment konsekvent överskattas och resultat från experiment 2 visar att τ av ramen minskar under de första 10 svängningar, utförde vi en känslighetsanalys för att bestämma den bästa metoden för att kvantifiera . τ för ram endast prövningar och ram plus objekt försök (tabell 4) τ är direkt proportionell mot tröghetsmoment av ett objekt: (A.2)
(A.2)
där I-axel är tröghetsmomentet i förhållande till svängningsaxeln, m är massan av systemet, g är tyngdaccelerationen, och d är avståndet mellan svängningsaxeln och masscentrum av systemet. Därför, om τ minskar, då så gör jag axeln eftersom m, g, och d är konstanter i en viss rättegång. Eftersom vi uppskattmate tröghetsmomentet hos ett föremål som:
Jag obj = jag obj + ram – Om Rame (A.3)
skatta tröghetsmoment av ramen (I frame) kommer att producera en större tröghetsmoment uppskattning för objektet (jag obj), vilket är i linje med våra bedömningar i experiment 1. Figur 6 visar τ från experiment 1 för båda bara ramen prövningar och ram plus objekt prövningar för den lättaste objektet och tyngsta objektet. Denna figur illustrerar att för tyngre föremål (t.ex. under knäprotes) det inte finns någon tydlig minskning av τ under de första 10 svängningar, men för lättare föremål finns det en liten systematisk minskning av τ.

Tabell 4. Jämförelse avfyra olika metoder för bestämning av svängningsperioden. Föremålet som används i denna analys var 9 x 9 x 61 cm block av behandlat virke. Skick C producerade den bästa uppskattningen av objektets tröghetsmoment i jämförelse med en alternativ teoretisk uppskattning baserad på objektets massa och geometri. Klicka här för att få en förstorad bild av tabellen. Anmärkningar: Variabla definitioner är samma som tabell 3 skick. A: t_frame och t_object beräknades som medeltiden svängning av 10 på varandra följande svängningar över 3 försök Villkor B:. var t_frame och t_object beräknas som medelvärdet av den första perioden av svängning över 3 separata prövningar skick C:. var t_frame bestäms som i villkor B; t_object bestämdes som i skick A. skick D: t_frame bestämdes som iVillkor A; t_object bestämdes som i skick B.
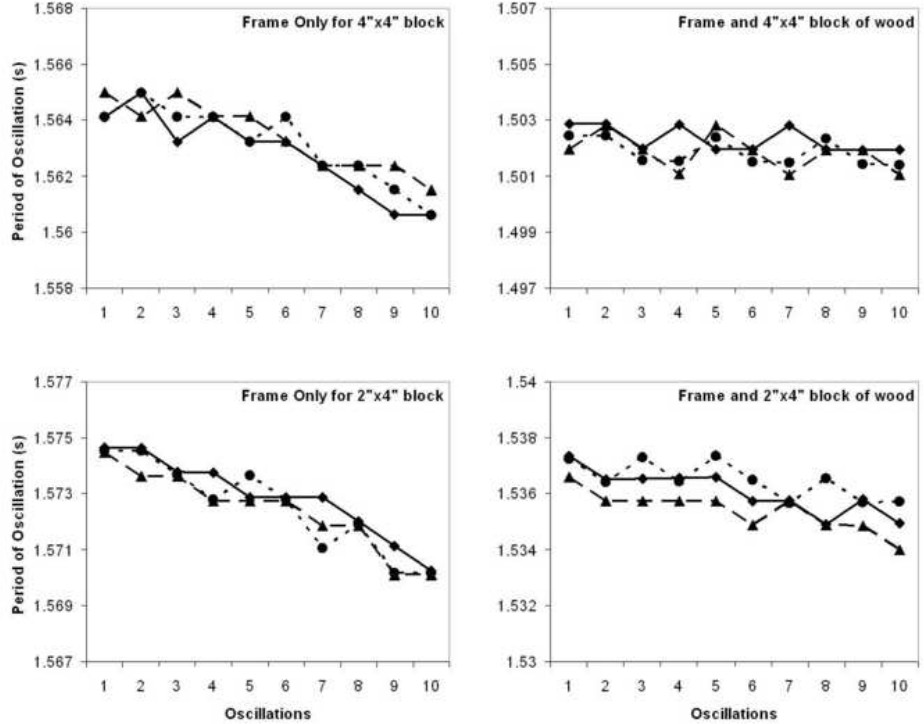
Figur 6. Perioder av pendling för de tyngsta och lättaste objekten. Den vänstra panelen visar de första 10 perioder av svängning av tre försök för bara ramen, och de högra panelerna visa samma för ramen plus objekt prövningar. Precis som i experiment 2, finns det en systematisk minskning av τ under de första 10 svängningar när bara ramen oscilleras. När den tunga objektet pendlat (m = 2.797 kg), fanns det ingen systematisk minskning i τ. Dock en liten minskning av τ observeras när ljusobjekt (m = 0.716 kg) pendlat. Typisk nedan-knäprotes massan har rapporterats variera från 1,2 till 2,1 kg 20,21. Även för de lättaste viktproteser, τ bör inteuppvisar en kraftig minskning under de första 10 svängningar.
Slutsats
När ensam aluminiumramen är pendlade kommer svängningsperioden bestämmas som medelvärdet av den första svängningen från 10 svängningsförsök. När aluminiumram och protes oscilleras kommer svängningsperioden bestämmas som medelvärdet av 30 svängningar (3 försök, 10 på varandra följande svängningar inom varje försök).
