En svingning og reaksjon bord teknikk ble presentert for estimering av treghet egenskaper under-kneproteser. Dette systemet ble validert og vist seg å være pålitelig ved estimering treghet egenskapene til kjente geometriske faste stoffer (vedlegg A). Protese lem treghet egenskaper for en gruppe av ensidige, transtibial amputerte ble beregnet på to måter: a) ved direkte måling med pendling og reaksjon bord teknikker, og b) ved hjelp av standard prediksjon ligninger opprettet for intakte lemmer. De resulterende treghet eiendoms anslag for protese var vesentlig forskjellig for to tilnærminger. Denne forskjellen i treghets egenskaper resulterte i betydelig forskjellige estimater av leddkinematikk under gange, med større forskjeller blir observert under swing.
Selv om betydelige forskjeller i leddkinematikk skjedde under holdning ved hjelp av de to forskjellige treghetsparameter beregninger, disse forskjellene var ssenteret når de vurderer effektene størrelser for disse forskjellene, og i sammenligning med forskjeller observert under swing. I de fleste studier av menneskelig bevegelse, kan disse statistisk signifikante forskjeller i løpet holdning ikke ha en innvirkning på resultatene i studien. Bakkereaksjonsstyrker har en stor innflytelse på den samlede øyeblikk størrelsene på underekstremitetene leddene under holdning fase av gang. 17-19 Selv om det var signifikante forskjeller i de treghet parametre for begge modellene, var ikke nok til å overvinne betydningen av disse forskjellene bakkereaksjonsstyrke bidrag til den felles øyeblikk produksjon i løpet holdning. Miller 25 også tidligere antydet at treghet egenskapene til protese siden hadde liten effekt på størrelsene på underekstremitetene leddkinematikk under holdning fase av driften. Men Miller 25 bare tok hensyn til forskjellene i masse og tyngdepunkt plassering av lem når endre prosthetic lem sin treghet egenskaper for den inverse dynamikk modell. Forskjeller i treghetsmoment ble ikke regnskapsført i modellen, men det ble foreslått at selv om treghetsmoment ble doblet eller halvert det ville trolig ha liten effekt på omfanget av felles øyeblikk. Den Iα leddet i ligningen av bevegelse utgjorde mindre enn 3% av den totale felles øyeblikk på et gitt punkt i løpet av holdning fase av driften. I absolutte termer, ble den største endringen i moment magnitude for vår studie observert i hofteleddet øyeblikk på ~ 11% av gangart syklus der den gjennomsnittlige omfanget økningen var ~ 2 nm. Dette var om lag halvparten av omfanget økningen som ble observert av Miller 25 under holdning fase av driften. Våre resultater kombinert med de av Miller tyder på at direkte tiltak av protese treghet, herunder treghetsmoment, har bare en liten eller ubetydelig effekt på de felles øyeblikk størrelser på hofte og kne under stance fasen av gange eller løping.
Med hensyn til swing fase av gang, valg av treghet modellen har en betydelig innvirkning på størrelsene av underekstremitetene leddkinematikk. Under sving, er det ingen stor ytre kraft, slik som den første reaksjonskraften under slagstilling. Bevegelsen av lem er mye mer avhengig av tregheten i systemet, og interaksjonene mellom segmentene. Dette ble reflektert av de store forandringer i leddkinetiske magnitudes observert da de to treghets forskjellige modeller ble benyttet i det inverse dynamikk analyse. Bruke regresjonsligninger basert på intakt anatomi å modellere protese under swing, antydet at en større muskulær innsats var nødvendig enn når faktiske målte treghet egenskaper protesen ble brukt.
Teknikken er beskrevet i denne artikkelen for å direkte måle treghet egenskapene til en under-kne protese har flere begrensninger. Vi har beskrevet metoder ennd gjort treghet eiendomsmålinger i bena bare for sagittalplan analyser. Forbedringer i dette systemet inkluderer å skape et indre bur struktur som kan være opphengt fra tre forskjellige akser, slik at alle de tre hovedtreghetsmomenter kunne måles. I tillegg kan reaksjonsbrett teknikk brukes for alle tre plan for å måle tredimensjonal plassering av protesen massesenter. En annen forbedring som kan gjøre de estimater av stumpen massen litt mer nøyaktig ville være å bruke en volumetrisk vurdering som er beskrevet av Czerniecki og kolleger 24, hvor den gjenværende lem er suspendert i en sylinder av vann for å beregne volumet, mens en ensartet vev tetthet er anvendt for å estimere lem masse. I tillegg, i stedet for å bruke en antatt prosent å fordele totalprotese masse mellom protesehylsen og fot, hver protese kan disarticulated ved ankelen, slik at hver komponent kan være weighed uavhengig. En annen begrensning av vår teknikk er at det krever litt ekstra tid under en eksperimentell økt. Generelt, vil ved hjelp av vår teknikk for å direkte måle protesen treghet sannsynlig legge 30 min til den totale tiden som er nødvendig for en datainnsamling økt.
På grunn av vårt lille utvalg av under-kne proteser med lignende design (dvs. lås og pin suspensjoner og dynamisk elastisk respons protese fot), utviklings definitive anbefalinger for beregning treghet egenskaper under kne protese lemmer som enkle prosenter av intakte lem treghet egenskaper er problematisk . Likevel, ved å kombinere våre resultater med treghet estimater for under-kneproteser fra andre studier 20,21,23 og sammenligne disse resultatene å treghet anslag for intakte lemmer, noen konsistente trender bli tydelig. Sammenlignet med det intakte benet, er massen av protesesidegående 30 til 40% mindre, er COM plassering 25-35% closer til kneleddet, og MOI er 50-60% mindre om en tverrgående akse gjennom kneleddet.
I konklusjonen, vil bruk av regresjonsanalyse ligninger for en intakt skaft og fot for å modellere treghet egenskapene til en under-kne protese påvirke størrelsen på de felles kinetiske estimater under swing, men vil bare ha en liten eller minimal innvirkning på disse størrelsene under holdning. Derfor, for forskere å fokusere bare på holdning fase av bevegelse ved hjelp av treghet egenskaper intakt lemmer for å modellere protese side vil trolig ikke endre konklusjonene i studien. Men for de som er interessert i swing fase kinetikk, direkte tiltak av protesen treghet egenskaper bør vurderes for å unngå fordreier den sanne dynamikken i benprotesen swing.
Vedlegg A
Pålitelighet og gyldighet Moment of Inertia og Center of Mass Beregninger
For å vurdere påliteligheten og validity av de eksperimentelle målinger av protesen treghetsmoment og massesenter sted, ble to enkle forsøk utført. I det første eksperimentet, ble treghetsmomenter og sentrum av masse steder av fire gjenstander eksperimentelt anslått i tre separate studier. De fire gjenstander var: 1) 9 x 9 x 61 cm blokk av behandlet trevirke (masse = 2,8 kg), 2) 9 x 9 x 64 cm blokk av ubehandlet trevirke (masse = 2,5 kg), 3) 7 x 9 x 65 cm blokk av ubehandlet trevirke (masse = 1,8 kg), og 4) 61 cm langt stykke av PVC-rør med og innvendig diameter på 8 cm og en utvendig diameter på 9 cm (masse = 0,8 kg). En oscillasjon teknikk 12 ble brukt til å beregne hvert objekts treghetsmoment om en tverrgående akse gjennom sentrum masse. Når et objekt svinger om en fast akse, for svingning av (τ) av objektet er proporsjonal med objektets treghetsmoment om den faste akse. Dersom oscillasjonen amplitude er mindre enn 5 ° i forhold til en nøytral posisjon,treghetsmoment av objektet kan estimeres basert på bevegelsene til en enkel pendel:
 (A.1)
(A.1)
hvor I aksen er treghetsmoment i forhold til de oscilla-aksen, m er massen av systemet, er g akselerasjonen på grunn av tyngdekraften, og d er avstanden mellom svingningsaksen og senteret av massen i systemet.
En reaksjonsbrett teknikk ble anvendt for å beregne hver objektets tyngdepunkt sted. Statisk likevekt ble antatt (Σ øyeblikk = 0) og det øyeblikk som er produsert av vekten av objektet, ble vekten av rammen, og reaksjonskraften summert om en fast referanseakse. Treghetsmoment og massesenter plasseringen av hvert objekt ble også beregnet basert på enkle geometriske ligninger. Våre eksperimentelle tiltak ble sammenlignet med disse geometriske estimations å vurdere gyldigheten. Pålitelighet av våre estimater for tyngdepunkt plassering og treghetsmoment ble vurdert ved hjelp av to (en for COM estimering og en for MOI estimering), enkelt faktor generell lineær modell ANOVAs, med tre gjentatt tiltak som gjenspeiler de tre studiene. Intraclass korrelasjonskoeffisienter (ICCS) ble også beregnet til å bestemme repeterbarhet av våre estimater.
I et andre eksperiment, vurderte vi påliteligheten av vår periode av oscillasjonen (τ) måling. τ ble målt i 10 sammenhengende studier med bare aluminiumsramme suspendert fra svingning aksen og 10 påfølgende forsøk med en trekloss (masse = 2,8 kg, mål = 9 x 9 x 61 cm) festet i aluminiumsramme og begge suspendert fra svingning akse. Under hvert forsøk, ble τ målt for 10 påfølgende svingninger ved hjelp av en fotocelle som utgangsspenning varierte basert på reflektert lys intensitet. Pålitelighet av vår måling for τ var enssessed med fire, enkelt faktor generell lineær modell ANOVAs, med 10 gjentatte tiltak. To (en for frame bare prøvelser og ett for frame + blokkere forsøk) ANOVAs ble brukt til å avgjøre om τ skilte mellom påfølgende svingninger (dvs. datamatrise ble satt opp slik at faktoren var påfølgende perioder på pendling innenfor en bestemt prøvetid). Da data matriser ble rotert 90 grader slik at den faktoren var sammenhengende studier og to flere ANOVAs ble brukt til å avgjøre om τ skilte seg over påfølgende studier. Intra korrelasjonskoeffisientene (ICC-verdiene) ble også beregnet for å bestemme repeterbarhet av våre målinger.
Resultater av Experiment 1 – The Four objekter
Hvert objekt er treghetsmoment om en tverrgående akse gjennom dens tyngdepunkt (I_obj_cm) ble konsekvent overestimert (ved ~ 5% for treklosser, og ved ~ 12% for PVC-rør) i forhold til de beregninger basert på hver objectR17, s masse og geometri (Iz) (tabell 3). Våre beregninger, men var svært pålitelig. Det var ingen forskjell i gjennomsnittlig treghetsmomentet (F 2,6 = 0,154, p = 0,861) for de fire objekter på tvers av de tre forsøkene. I tillegg ICC-verdiene viser at forsøk på tvers vår treghetsmoment estimering var svært repeterbare (ICC = 1,00). Derfor, selv om vår estimering tendens til å overvurdere objektets treghetsmoment i forhold til geometriske estimat våre beregninger var pålitelig.
Vår massesenter plassering estimering ved bruk av et reaksjonsbrett teknikk var i samsvar med beregninger basert på forutsatt ensartet tetthet og en geometrisk modell. Forskjellene var mindre enn 1%. Det var ingen forskjell i midlere massesenter plassering (F 2,6 = 1,126, p = 0,384) for de fire objekter på tvers av de tre forsøkene. I tillegg ICC-verdiene viser at forsøk på tvers senteret av massen estimering var svært repeterbare (ICC> 0,99). Såledesvårt senter for masseberegning var gyldig og pålitelig.

.. Tabell 3. Vår eksperimentelle beregninger av treghetsmomenter og sentrum av masse steder for de fire stedene i forhold til beregninger basert på massen og geometrien av hvert objekt Klikk her for å få et større bilde av bordet. Variable definisjoner: mframe = massen av aluminiumsramme; mobject = massen til objektet; t_frame = periode med pendling av rammen bare; periode av svingningen ble bestemt som gjennomsnittet av 10 etterfølgende svingninger og på tvers av tre påfølgende forsøk. t_object = periode med pendling av ramme og objekt sammen; bestemmes på samme måte som t_frame; I_Frame_osc = I av rammen i forhold til de oscilla-aksen;I_Frame_obj_osc = I i rammen pluss objektet i forhold til de oscilla-aksen; I_obj_osc = I av objektet i forhold til de oscilla-aksen; I_obj_cm = I av gjenstanden om en akse gjennom objektets massesentrum; Iz = Teoretisk prediksjon av jeg om objektets CM hjelp av følgende geometriske prediksjon ligninger:
PVC: ![]() ; hvor R var ytre radius, r var indre radius, og h var lengde
; hvor R var ytre radius, r var indre radius, og h var lengde
Wood: ![]() ; der a er lengden og b er bredden Geometriske CM plassering ble spådd som 50% av objektet lengde.
; der a er lengden og b er bredden Geometriske CM plassering ble spådd som 50% av objektet lengde.
Resultater av Experiment 2 – Periode Oscillation (τ) Assessment
Når aluminiumsramme alene ble suspendert fra de oscilla-akse og svinges, τ gjennomført og systematisk redusert (F 9,81 = 123,25, p <0,001) over det første 10 oscillerendesjoner med ca 6 msek i alle 10 svinging studier (figur 5, venstre panel). Across studiene var gjennomsnittlig periode med pendling også funnet å avvike signifikant (F 9,81 = 13,97, p <0,001) når bare rammen ble svingte. Imidlertid ICC-verdiene viser at innenfor et gitt prøve den systematiske reduksjon i τ i løpet av de første 10 oscillasjoner var repeterbare (ICC = 0,99). Når rammen og trekloss (m = 2797 g) ble svingte sammen, gjorde τ ikke endres i løpet av de første 10 svingninger (F 9,81 = 3,031, p = 0,116) og de slemme τ over 10 påfølgende studier var ikke signifikant forskjellig ( F 9,81 = 3,533, p = 0,093) (Figur 5, høyre panel). ICC-verdiene for ramme pluss objekt studier tyder på at innen en bestemt prøvetid τ er ikke repeterbare fra pendling til oscillasjon (ICC = 0,17). Disse data antyder at for rammen bare forsøk τ er bedre beregnet som et gjennomsnitt av de første svingning på tvers av en serie av tri als og at når et objekt med egenskaper som ligner på de av en under-kne protese oscilleres, er τ bedre beregnet som gjennomsnittet over påfølgende svingninger og på tvers av en rekke prøvelser.
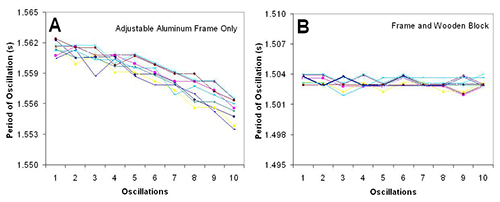
Figur 5. Periode oscillasjon målt for (A) aluminiumsramme bare og (B) en ramme og trekloss (blokk masse = 2,8 kg, blokkdimensjoner = 9 x 9 x 61 cm). Viser Hvert panel 10 separate forsøk med den første 10 svingninger av hvert forsøk vises. Med bare rammen suspendert fra pendling aksen (venstre panel), τ systematisk redusert i løpet av de første 10 svingninger. Imidlertid, når en trekloss ble tilsatt til rammen, τ ikke systematisk varierer på tvers av de første 10 oscillasjoner (høyre panel).
Følsomhet av Moment of Inertia til Periode Oscillation
t "> Fordi resultatene fra eksperimentet en foreslå våre beregninger av et objekts treghetsmoment er konsekvent overvurderte og resultater fra forsøk 2 tyder på at τ av rammen reduseres i løpet av de første 10 svingninger, utførte vi en sensitivitetsanalyse for å finne den beste metoden for å kvantifisere . τ for frame bare prøvelser og ramme pluss objekt studier (Tabell 4) τ er direkte proporsjonal med treghetsmoment av et objekt: (A.2)
(A.2)
hvor I aksen er treghetsmoment i forhold til de oscilla-aksen, m er massen av systemet, er g akselerasjonen på grunn av tyngdekraften, og d er avstanden mellom svingningsaksen og senteret av massen i systemet. Derfor, hvis τ synker, da det gjør jeg aksen fordi m, g, og d er konstanter innenfor et gitt prøve. Siden vi estimerermate treghetsmomentet av en gjenstand som:
Jeg obj = jeg obj + ramme – Hvis Rame (A.3)
underslår treghetsmoment av rammen (I rammen) vil produsere en større treghetsmoment estimat for objektet (jeg obj), som er konsistent med våre beregninger i eksperiment 1. Figur 6 viser τ fra eksperiment 1 for både rammen bare prøvelser og ramme pluss objekt prøvelser for det letteste objektet og tyngste objekt. Denne figuren viser at for tyngre gjenstander (f.eks, under kneet protese) det ikke er noen tydelig reduksjon i τ løpet av de første 10 oscillasjoner, men for lettere gjenstander er det en viss systematisk reduksjon i τ.

Tabell 4 Sammenligning av.fire forskjellige metoder for å bestemme perioden for pendling. Gjenstanden brukt i denne analysen ble 9 x 9 x 61 cm blokk av behandlet trevirke. Tilstand C produserte det beste estimatet av objektets treghetsmoment i forhold til en alternativ teoretisk beregning basert på objektets masse og geometri. Klikk her for å få et større bilde av bordet. Merknader: Variable definisjoner er den samme som Tabell 3 tilstand. A: t_frame og t_object ble beregnet som gjennomsnittet periode med pendling av 10 påfølgende svingninger over tre studier tilstand B:. ble t_frame og t_object beregnet som gjennomsnittet av den første perioden av pendling på tvers av tre separate studier Tilstand C:. t_frame ble bestemt som i tilstand B; t_object ble bestemt som i tilstand A. Tilstand D: t_frame ble bestemt som iTilstand A; t_object ble bestemt som i Tilstand B.
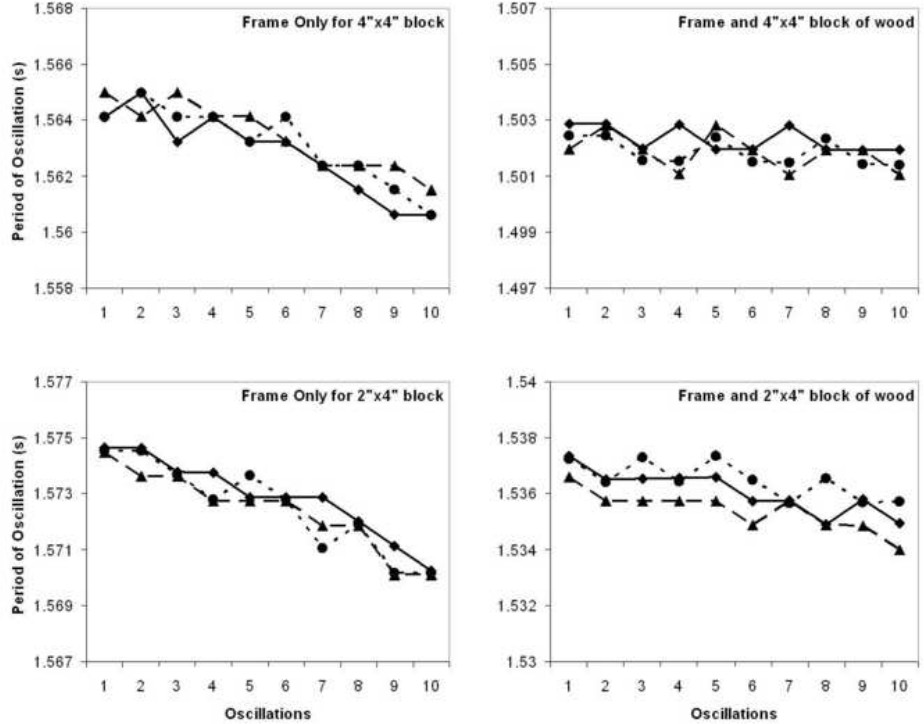
Figur 6. Perioder med pendling for de tyngste og letteste stedene. Den venstre panelene vise de første 10 perioder med svinging av tre forsøk for rammen bare, og de riktige panelene viser samme for rammen pluss objekt prøvelser. Som i forsøk 2, er det en systematisk reduksjon av τ i løpet av de første 10 oscillasjoner når bare en ramme oscilleres. Når den tunge gjenstand ble oscillert (m = 2,797 kg), var det ingen systematisk reduksjon i τ. Det ble imidlertid en liten nedgang i τ observert når lyset objekt (m = 0,716 kg) ble svingte. Typisk under-kne protese massen har blitt rapportert å variere 1,2 2,1 kg 20,21. Dermed, selv for de letteste vekt proteser, bør ikke τoppviser en betydelig reduksjon i løpet av de første 10 oscillasjoner.
Konklusjon
Når aluminiumsramme alene oscilleres, vil perioden for svingning bestemmes som gjennomsnittet av den første svingning fra 10 svingningsforsøk. Da rammen og protesen aluminium blir svinget, vil perioden for svingning bestemmes som gjennomsnittet av 30 svingninger (tre forsøk, 10 sammenhengende oscillasjoner i hvert forsøk).
