Oppgave-spesifikke handlinger dukke opp fra spontane bevegelser i spedbarnsalder. Det er foreslått at oppgavespesifikke handlinger dukke opp gjennom et funn-læringsprosessen 1,2. Oppgaver blir oppdaget av spedbarn som de spontant flytte og utforske handlinger som produserer nye virkninger i miljøet. Oppgavespesifikke handlinger fremstå som spedbarn utnytte sammenhengene mellom sine handlinger og deres effekt på verden rundt dem. Men lite er kjent om de nøyaktige prosesser som spedbarn utforske og utnytte for å lære å endre sine spontane bevegelser for å utføre oppgavespesifikke handlinger. Her en metode er beskrevet der 3-4 måneder gamle spedbarn lære en oppgave ved funn og deres benbevegelser fanges å kvantifisere læringsprosessen.

Figur 1: Infant sparker-aktivert mobil oppgave. </strong> Sentrum light-emitting diode (LED) som er festet til den stive kroppen på hver fot (gul sirkel) aktiverer mobil når den krysser den virtuelle terskel (rød stiplet linje). Re-trykt med tillatelse fra Sargent et al. 3
Denne oppdagelsen-læring oppgaven bruker et spedbarn aktivert mobil som roterer og spiller musikk basert på det angitte beinet handlingen av spedbarn tre. Spedbarn plassert liggende under mobile aktivere den ved å flytte føttene vertikalt over en virtuell terskel (figur 1). Dette paradigmet er unik i at som spedbarn uavhengig oppdager at deres ben handlinger aktivere mobile, de spedbarns benbevegelser spores ved hjelp av et motion capture system som åpner for kvantifisering av læringsprosessen.
Den eksperimentelle protokollen omfatter to dager med datainnsamling. Dag 1 består av en 2 min opprinnelige tilstand der et spedbarn sparker spontant, men beinet hans handlingerkan ikke aktivere spedbarn mobil, etterfulgt av en 6 min oppkjøpet tilstand der spedbarnets leg handlinger aktivere spedbarn mobile dersom barnet flytter føttene vertikalt for å krysse en virtuell terskel. Denne protokollen tillater kvantifisering av spedbarns ben spontane handlinger samt kvantifisering av ulike aspekter av bevegelsene som spedbarn undersøke forholdet mellom deres ben handlinger og aktivering av spedbarn mobile. På dag 2, i tillegg til 2 min opprinnelige tilstand og 6 min anskaffelse tilstand, er en 2 min utryddelse tilstand tilsettes der spedbarnets legg handlinger ikke aktiverer spedbarn mobile. Dette åpner for kvantifisering av hvordan spedbarn endre sine ben handlinger når en allerede lært miljørespons er avviklet.
I tidligere babymobil paradigmer, hyppighet av ben bevegelser 4-6, spesifikk hofte og kne vinkler 7,8, eller sparker et panel 9 har vært reinforced med mobile bevegelse. Ytelse hver dag ble definert som en økning i disse bein handlinger under oppkjøpet eller utryddelse tilstand i forhold til opprinnelige tilstand 4-9. Læring på tvers dager ble definert som en økning i disse bein handlinger under baseline eller oppkjøp tilstand Dager 2 eller 3 og baseline tilstanden Dag 1 5,6. Disse tidligere mobile paradigmer viser at spedbarn øke hyppigheten av leg handlinger som er forsterket med mobile aktivering, men har de ikke gi informasjon om bevegelsen alternativer spedbarn har tilgjengelig for dem når de skal lære oppgaven. For eksempel, hvis sparker rente er forsterket, spedbarn demonstrere ytelse og læring når deres sparker renteøkninger enten når vi samhandler med mobil eller når mobil ikke lenger aktiveres. Dette viser at spedbarn kan avgrense sparker rate, men det er ukjent om spedbarn kan finjustere sine ben koordinering mønster eller dreiemoment produksjon til vanligvis genererere leg handlinger som ikke er innenfor deres foretrukne bevegelsen repertoar.
Denne mobil paradigmet er unik i at spedbarn er pålagt å demonstrere mer raffinert etappe handling for å aktivere den mobile enn tidligere mobil paradigmer. I denne mobile paradigmet, er høyden på hver fot over bordet beregnet i løpet av 2 min opprinnelige tilstand ved hjelp av posisjonsdata fra en lysemitterende diode (LED) som er festet til hver fot. En virtuell terskel blir så satt parallelt med bordet i en høyde som ligger innenfor den øvre del av høyden av begge føtter under opprinnelige tilstand. Under oppkjøpet, mobil roterer og spiller musikk hvis begge føtter krysser terskelen. Etter 3 sek, mobil stopper og reaktiverer bare hvis barnet flytter foten under terskelverdien, og deretter beveger foten vertikalt og igjen krysser terskelen. For å aktivere mobil for den største mengden av tid, spedbarn trenger å flytte en fot over terskelen og vedlikeholde det mot gravligheten i 3 sekunder, deretter raskt bevege foten under terskelen og igjen flytte den over terskelen og hold den der i 3 sek, osv. Dette krever mer raffinert etappe handling enn bare å øke sparker rate.
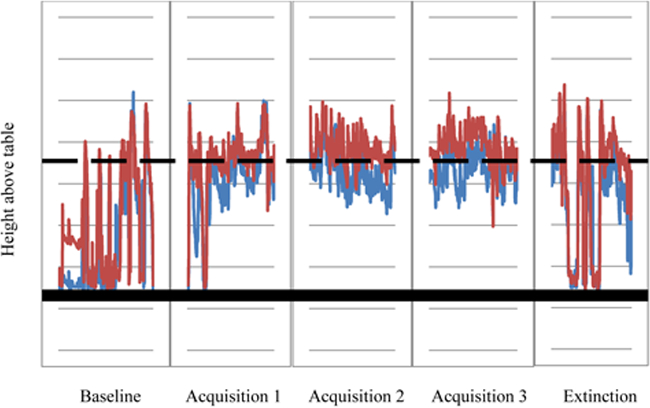
Figur 2: Ufiltrerte posisjonsdata til slutt effektorer (fot) fra en representant spedbarn Ufiltrert posisjonsdata fra dag to av en tre måneder gammel baby som demonstrerte læring basert på de individuelle lærings kriterier.. Den røde linjen er posisjonsdata i z-koordinat av light-emitting diode (LED) som er plassert på høyre fot. Den blå linjen er posisjonsdata fra LED på venstre fot. Tykk svart linje er tabellen. Stiplet linje er den virtuelle terskelen plassert 14 cm over bordet som bestemmes individuelt for hver spedbarn basert på høyden av deres sparke under baselinebetingelse av Dag 1. X-aksen er tid merket med to minutters mellomrom. Legg merke til hvordan barnet beveger føttene under baseline når mobil ikke aktivere og i løpet av første 30 sek av oppkjøpet en, så han konsekvent holder begge føttene av bordet og flytter føttene rett rundt terskel for neste 5½ min til mobil ikke lenger aktiveres i løpet av utryddelse tilstand.
Den andre unike med denne mobil paradigmet er at hver barnets ben handling spores ved hjelp av state-of-the-art motion capture teknikker for å kvantifisere hvordan spedbarn bruke sine bevegelses alternativer for å lære oppgaven. Ufiltrerte posisjonsdata i LED på hver fot som aktiverer mobil fra en representant spedbarn er inkludert i figur 2. Legg merke til hvordan barnet beveger føttene på ulike høyder over tabellen under baseline og første del av oppkjøpet, men beveger seg deretter begge føttene rett rundt terskel under resten av oppkjøpet Condisjon til mobil ikke lenger aktiveres under utryddelse. Dette er en av mange mulige bevegelses strategier for å oppnå oppdagelsen-læring oppgave. Strategiene kan kvantifiseres ved å beregne tredimensjonale kinematikk og kinetikk ved hjelp av posisjonsdata anskaffet fra motion capture-systemet. Spesielt er læringsprosessen kvantifiseres i form av prosentandelen av jern ben virkning (% RLA), som er lik varigheten av mobile aktivering stilling variansen av ende effektorer (fot) som aktiverer den mobile, hofte-kne koordinerings mønstre og hofte og kne felles momentene.
