महामारी विज्ञान के आंकड़ों से संकेत मिलता है कि दुनिया भर में हर साल स्ट्रोक के ~ 17 मिलियन नए मामले होते हैं, जिसमें निम्न और मध्यम आय वाले देशों में घटनाओं में वृद्धि होतीहै। 2030 तक नए मामलों की संख्या बढ़कर 77 मिलियन होने का अनुमानहै। स्ट्रोक के कारण मोटर हानि अक्सर रोगी की गतिशीलता और दैनिक जीवन की गतिविधियों में भागीदारी को प्रभावित करती है, जिससे जीवन की निम्न गुणवत्ता में योगदान होता है। पारंपरिक मोटर पुनर्वास में मैनुअल थेरेपी शामिल है, लेकिन पिछले कुछ दशकों में, पुनर्वास के लिए रोबोट सिस्टम विकसित किए गए हैं। इन प्रणालियों उच्च तीव्रता, खुराक, मात्रात्मकता, विश्वसनीयता, दोहराव, और लचीलापन3 पर चिकित्सा वितरित कर सकते हैं और दोनों तीव्र और पुरानी स्ट्रोक रोगियों 4,5,6 के लिए प्रभावी पुनर्वास उपचार के रूप में क्षमता दिखाया है. चिकित्सा देने के अलावा, पुनर्वास के लिए रोबोट सिस्टम मूल्यांकन उपकरण के रूप में इस्तेमाल किया जा सकता है के रूप में वे सेंसर है कि रोगी आंदोलन कीनेमेटिक / गतिज डेटा 7,8 को मापने कर सकते हैं से लैस किया जा सकता है. ऊपरी छोर मोटर पुनर्वास के लिए, इस तरह के डेटा न केवल रोबोट चिकित्सा द्वारा प्राप्त रोगी की मोटर वसूली के स्तर का आकलन करने के लिए उपयोगी साबित हुआ है और पारंपरिक नैदानिक आकलन 9,10 के लिए एक पूरक उपकरण के रूप में कार्य किया है, लेकिन यह भी स्ट्रोक11 से मोटर वसूली की प्रक्रिया की समझ को आगे बढ़ाने में योगदान दिया है, 12 के साथ-साथ स्वस्थ विषयों में आंदोलन और मोटर सीखने के तंत्रिका नियंत्रण 3,13,14. नतीजतन, इन निष्कर्षों पुनर्वास उपचार15 बढ़ाने के लिए एक आधार प्रदान की है.
पिछले दो दशकों में, निचले अंग न्यूरोरेबिलिटेशन के लिए कई रोबोट उपकरणों का प्रस्ताव किया गया है, जो एक्सोस्केलेटन से फैले हुए हैं जो चलने के दौरान रोगी के शरीर के वजन का समर्थन करते हैं (उदाहरण के लिए, ट्रेडमिल पर, जैसे लोकोमैट16) स्थिर रोबोट सिस्टम के लिए जो रोगी को व्यायाम करने की अनुमति देता है चलने के बिना टखने, घुटने या पैर (जैसे रटगर्स टखने17, उच्च प्रदर्शन टखने पुनर्वास रोबोट18, और ग्वांगजू इंस्टीट्यूट ऑफ साइंस एंड टेक्नोलॉजी (जीआईएसटी) टखने/पैर पुनर्वास रोबोट19) या सक्रिय पैर ऑर्थोस जो रोगी द्वारा ओवरग्राउंड या ट्रेडमिल पर चलने के लिए पहने जाने वाले एक्सोस्केलेटन हैं (जैसे कि संचालित चाल ऑर्थोसिस20 और एमआईटी एंकलेबोट21)। निचले अंग पुनर्वास के लिए रोबोट पर समीक्षा के लिए 22,23,4 देखें।
स्ट्रोक रोगियों पर निचले अंग पुनर्वास के लिए रोबोट उपकरणों के नैदानिक अध्ययन के परिणाम उत्साहजनक रहे हैं और दिखाया गया है कि ये सिस्टम विशिष्ट डिवाइस और नैदानिक प्रोटोकॉल के आधार पर जोड़ों की गति की सीमा (रोम), मांसपेशियों की ताकत या चाल में सुधार कर सकते हैं (पुनर्वास के लिए निचले अंग रोबोट की प्रभावकारिता पर समीक्षा के लिए 24,25 देखें)। हालांकि यह माना गया है कि रोबोट-असिस्टेड थेरेपी न्यूरोप्लास्टिक परिवर्तनों को बढ़ावा देती है, जिसके परिणामस्वरूप अंततः मोटर क्षमताओं में सुधार होता है26, स्ट्रोक से मोटर रिकवरी की प्रक्रिया वास्तव में कैसे होती है और कौन से रोबोट प्रशिक्षण प्रोटोकॉल निचले अंग मोटर क्षमताओं की वसूली की प्रक्रिया का अनुकूलन करते हैं, ज्यादातर अस्पष्ट रहते हैं। वास्तव में, पुनर्वास रोबोट (या तो अकादमिक शोधकर्ताओं या वाणिज्यिक संस्थाओं द्वारा) के बढ़ते विकास और मोटर रिकवरी4 से गुजरने वाले न्यूरोफिज़ियोलॉजिकल तंत्र की सीमित समझ के बीच एक महत्वपूर्ण, बढ़ती असमानता है। आंदोलन कीनेमेटीक्स या एम्बेडेड सेंसर के साथ लिया संयुक्त टोक़ के माप मात्रात्मक रूप से मोटर व्यवहार परिवर्तन है कि रोगियों को कम अंग मोटर क्षमताओं 27,28,29 ठीक हो जाते हैं, आंशिक रूप से इस अंतर को भरने के रूप में वर्णन करने के लिए योगदान दिया है. हालांकि, इस तरह के परिवर्तनों के अंतर्निहित तंत्रिका सहसंबंधों की कम जांच की गई है। यह कई कारणों से है।
मस्तिष्क कार्यात्मक इमेजिंग समय लेने वाली है और कभी-कभी नैदानिक परीक्षणों के संदर्भ में पूरा करना मुश्किल होता है, जिसे अक्सर अध्ययन के लिए रोगी के पालन की संभावना को अधिकतम करने के लिए रोगी के बोझ को कम से कम रखने की आवश्यकता होती है। यह उन व्यक्तियों के लिए विशेष रूप से सच है जिन्हें स्ट्रोक का सामना करना पड़ा है, इस तथ्य को देखते हुए कि स्ट्रोक के बाद थकान और मांसपेशियों की कमजोरी अक्सर30 देखी जाती है। इसके अलावा, इमेजिंग तौर-तरीके जो चुंबकीय क्षेत्रों पर आधारित होते हैं, जैसे कार्यात्मक चुंबकीय अनुनाद इमेजिंग (एफएमआरआई), को चुंबक-सुरक्षित होने के लिए रोगी और रोबोट हार्डवेयर दोनों की आवश्यकता होती है।
गैर-इनवेसिव इमेजिंग तौर-तरीकों में, कार्यात्मक निकट-इन्फ्रारेड स्पेक्ट्रोस्कोपी (एफएनआईआरएस) एक इमेजिंग तकनीक है जो विशेष रूप से रोबोटिक थेरेपी से गुजरने वाले विषयों में मस्तिष्क सक्रियण के क्षेत्रों का आकलन करने के लिए उपयुक्त है। एफएमआरआई के समान, एफएनआईआरएस मस्तिष्क में रक्त ऑक्सीजनकरण/डीऑक्सीजनेशन को मापता है। हालांकि, एफएमआरआई के विपरीत, एफएनआईआरएस रोबोट हार्डवेयर के साथ पूरी तरह से संगत है, और यह अक्सर पोर्टेबल होता है, यहां तक कि बेडसाइड पर प्रयोग करने योग्य भी होता है। इसके अलावा, fNIRS कम लागत और गति कलाकृतियों 31,32,33 के लिए कम संवेदनशीलता है.
70 के दशक के उत्तरार्ध में34 में इसकी पहली शुरूआत के बाद से कई नैदानिक सेटिंग्स में इसके स्पष्ट फायदे और व्यापक उपयोग के बावजूद, केवल कुछ अध्ययनों ने कम अंग आंदोलनों और स्ट्रोक मोटर रिकवरी से जुड़े मस्तिष्क सक्रियण को निर्धारित करने के लिए एफएनआईआरएस का उपयोग किया है। या तंत्र के तंत्रिका नियंत्रण के तंत्र को स्पष्ट करने के उद्देश्य से एफएनआईआरएस अध्ययन या स्ट्रोक से मोटर वसूली के मूल्यांकन ने ज्यादातर एकल-संयुक्त आंदोलनों (जैसे, डॉर्सिफ्लेक्सियन, प्लांटार फ्लेक्सन या घुटने के विस्तार आंदोलनों 35,36,37) की जांच की है, 38,39,40,41,42,43, या साइकिल चलाना44। समीक्षा के लिए45 देखें। इसी तरह, निचले अंग के लिए रोबोट-असिस्टेड थेरेपी पर एफएनआईआरएस अध्ययन ने ज्यादातर रोबोट-सहायता प्राप्त चाल पुनर्वास पर ध्यान केंद्रित किया है; समीक्षा के लिए46 देखें। कुछ अध्ययनों ने रोबोटिक उपकरणों47,48 के लिए नियंत्रण संकेत प्राप्त करने के लिए मस्तिष्क-कंप्यूटर इंटरफ़ेस (बीसीआई) प्रणाली के हिस्से के रूप में एफएनआईआरएस का उपयोग करने पर ध्यान केंद्रित किया है; जबकि यह शोध क्षेत्र एफएनआईआरएस संकेतों के प्रसंस्करण पर भी निर्भर करता है, इसका लक्ष्य अलग है और मुख्य रूप से रोगी के इरादों (जैसे, गंभीर मोटर विकलांग रोगियों) को डिकोड करने पर केंद्रित है।
यहां प्रस्तुत पायलट अध्ययन निचले अंग पुनर्वास के लिए रोबोट प्रणाली के प्रभावों की जांच करने के प्रारंभिक प्रयास का हिस्सा है। रोबोट लक्ष्य-उन्मुख निचले अंग पुनर्वास प्रदान कर सकता है जिसमें रोजमर्रा के बहु-संयुक्त आंदोलनों में प्रशिक्षण शामिल है और साथ ही निचले अंग के एकल जोड़ों (जैसे, घुटने या टखने) को चिकित्सा प्रदान करता है (यानी, नीचे-ऊपर पुनर्वास कार्यक्रम लागू करता है)।
अध्ययन का उद्देश्य एक प्रयोगात्मक प्रोटोकॉल की व्यवहार्यता की जांच करना है जिसके लिए निचले अंग, बहु-संयुक्त पॉइंटिंग आंदोलनों के प्रदर्शन के दौरान एफएनआईआरएस डेटा के अधिग्रहण की आवश्यकता होती है। इस अध्ययन में डेटा अधिग्रहण अवधि की अवधि, जो 6 मिनट तक सीमित थी, ठेठ एफएनआईआरएस प्रोटोकॉल से कम है। यह इस शोध की व्यावहारिकता और नैदानिक प्रयोज्यता को बढ़ाने के उद्देश्य से बनाया गया एक जानबूझकर विकल्प था, विशेष रूप से सीमित गतिशीलता या ताकत वाले रोगियों में। इस तरह के जटिल बहु-संयुक्त आंदोलनों के एफएनआईआरएस सहसंबंधों की पहचान करना और रोबोट सहायता द्वारा मस्तिष्क सक्रियण को कैसे संशोधित किया गया था, इस बारे में अंतर्दृष्टि प्राप्त करना भी रुचि के बिंदु थे। इस उद्देश्य के लिए, एक ही प्रतिभागियों के साथ प्रयोगों के दो सत्र आयोजित किए गए थे: एक बिना रोबोट सहायता के और एक रोबोट सहायता के साथ। अंत में, यह टिप्पणी करना महत्वपूर्ण है कि यह अध्ययन रोबोटिक थेरेपी द्वारा लक्षित आंदोलनों के दौरान प्रोटोकॉल व्यवहार्यता और मस्तिष्क सक्रियण के मूल्यांकन के संदर्भ में भविष्य के अनुसंधान के लिए एक नींव स्थापित करने के लिए स्वस्थ विषयों पर केंद्रित है।
उपकरण
निचले अंग पुनर्वास ( चित्रा 1 देखें) देने के लिए डिज़ाइन किया गया एक पोर्टेबल रोबोट हमारे प्रयोगों का संचालन करने के लिए इस्तेमाल किया गया था। रोबोट में एक 3 डी पहुंच योग्य कार्यक्षेत्र है और कॉम्पैक्ट और हल्का है, जिसका वजन लगभग 35 पाउंड है, जो परिवहन और स्थापित करना आसान बनाता है।
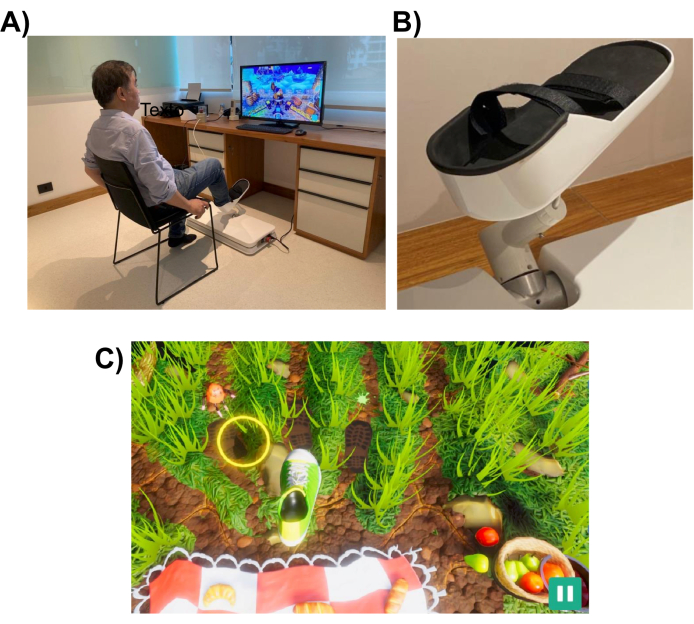
चित्रा 1: प्रायोगिक सेटअप। (ए) निचले अंग के लिए डिज़ाइन किया गया रोबोट सिस्टम (फर्श पर स्थापित)। एक स्वयंसेवक को अपने दाहिने पैर के साथ इंटरफ़ेस का उपयोग करते हुए दिखाया गया है। (बी) विषय के पैर के लिए समर्थन संरचना जो रोबोट प्रणाली से लगाव को सक्षम बनाती है। (सी) पिकनिक गेम का एक स्क्रीनशॉट। खेल का उद्देश्य पैर (हरे और सफेद जूते) को लक्ष्य (पीला घेरा) पर ले जाना है। कृपया इस चित्र का एक बड़ा संस्करण देखने के लिए यहाँ क्लिक करें.
रोबोटिक सिस्टम को एक मरीज को निचले अंग आंदोलनों को करने में सहायता करने के लिए डिज़ाइन किया गया है, जो रोजमर्रा के कार्यों में किए जाते हैं, जैसे कि इशारा करना या लात मारना। यह इंटरैक्टिव वर्चुअल रियलिटी गेम्स का उपयोग करता है, जो कंप्यूटर मॉनीटर या रोबोटिक डिवाइस के सामने रखी टेलीविजन स्क्रीन पर प्रदर्शित होते हैं ( चित्र 1 देखें)। रोबोट-एंड प्रभावक रोगी के निचले अंग (जैसे, टखने) से जुड़ा होता है, और इसकी स्थिति को स्क्रीन पर कर्सर की स्थिति में मैप किया जाता है। एक विशिष्ट खेल रोगी आंदोलन के लक्ष्य को दर्शाता है (उदाहरण के लिए, गेंद को इंगित करने या कहां किक करने के लिए वस्तु)।
आंदोलन कार्य को पूरा करने के लिए, रोबोट रोगी को सहायता के स्तर के साथ सहायता कर सकता है जो पूर्ण सहायता से लेकर कोई भी नहीं हो सकता है। रोगी के मोटर हानि के स्तर के आधार पर प्रत्येक पुनर्वास सत्र की शुरुआत में रोबोट सहायता का स्तर चुना जाता है। विषय द्वारा किए गए आंदोलनों का उपयोग खेल द्वारा रोगी के प्रदर्शन को स्कोर करने और उन्हें उनके प्रदर्शन (जैसे, रोम, आंदोलनों की संख्या और रोबोट सहायता के स्तर) पर प्रतिक्रिया प्रदान करने के लिए किया जाता है। खेलों को रोगी की रुचि और ध्यान बनाए रखने के लिए इंटरैक्टिव और मनोरंजक होने के लिए डिज़ाइन किया गया है। इस अध्ययन में, प्रतिभागियों ने “पिकनिक गेम” खेला, जिसमें खिलाड़ी को कीड़ों को तौलिया तक पहुंचने और भोजन चोरी करने से रोकना था (स्क्रीनशॉट के लिए चित्र 1, निचला पैनल देखें)।
डेटा अधिग्रहण दो अलग-अलग निरंतर-तरंग ऑप्टोड (760 एनएम और 850 एनएम), 8 दोहरे टिप एलईडी स्रोतों और 8 दोहरे टिप सक्रिय डिटेक्टरों के साथ पोर्टेबल एफएनआईआरएस अधिग्रहण प्रणाली के साथ किया गया था। संकेतों को 10.17 हर्ट्ज की नमूना दर का उपयोग करके प्राप्त किया गया था। एक लैपटॉप अंशांकन अनुकूलन और fNIRS प्रणाली द्वारा बनाई गई एक वाई-फाई नेटवर्क का उपयोग कर संकेत रिकॉर्डिंग के लिए इस्तेमाल किया गया था.
पूर्व निर्धारित स्थानों में ऑप्टोड को पकड़ने के लिए एक टोपी का उपयोग किया गया था। स्रोतों और डिटेक्टरों को ग्रिड स्थानिक वितरण में 10-10 अंतर्राष्ट्रीय ईईजी प्रणाली के अनुसार रखा गया था। प्रत्येक एफएनआईआरएस चैनल को लगभग 30 मिमी की अंतर-ऑप्टोड दूरी के साथ एक स्रोत-डिटेक्टर जोड़ी द्वारा परिभाषित किया गया था। ऑप्टोड को पूरक मोटर, प्रीमोटर और मोटर क्षेत्रों में चित्र 2 में दिखाए गए स्थानों पर रखा गया था। चैनलों की कुल संख्या 28 थी, जहां 8 कम दूरी के चैनल थे जो एक एकल डिटेक्टर के लिए फाइबर ऑप्टिक्स एडाप्टर का उपयोग करके प्रत्येक स्रोत से जुड़े थे। हार्डवेयर के मल्टीप्लेक्सिंग सेटअप को देखते हुए, केवल एक डिटेक्टर का उपयोग करके सभी स्रोतों से कम दूरी की जानकारी प्राप्त करना संभव है।
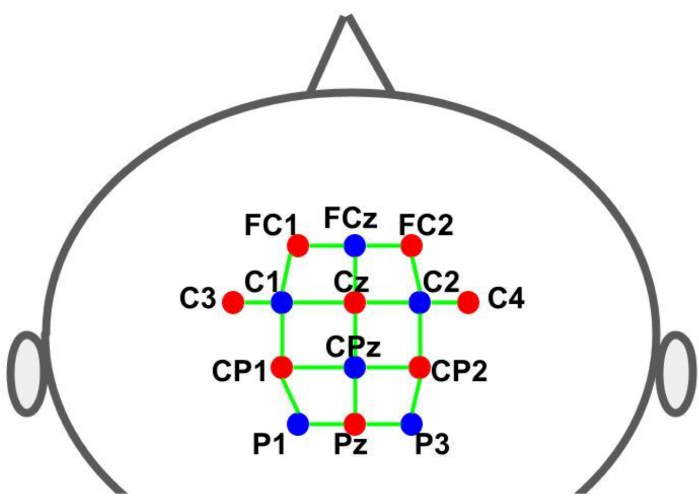
चित्रा 2: 10-10 ईईजी प्रणाली का उपयोग करके असेंबल लेआउट। अक्षर और संख्याएं स्रोत/डिटेक्टर स्थानों को इंगित करती हैं। लाल और नीले डॉट्स क्रमशः स्रोत और डिटेक्टर ऑप्टोड का प्रतिनिधित्व करते हैं। हरी रेखाएं fNIRS चैनलों का प्रतिनिधित्व करती हैं जिनमें स्रोत और डिटेक्टर जोड़े होते हैं। कृपया इस चित्र का एक बड़ा संस्करण देखने के लिए यहाँ क्लिक करें.
प्रायोगिक डिजाइन
प्रयोग दो अलग-अलग प्रयोगात्मक स्थितियों के तहत आयोजित किया गया था, जो विषय के आंदोलनों के लिए रोबोट द्वारा प्रदान की गई सहायता के स्तर में भिन्न था। पहली स्थिति में, रोबोट को विषय के आंदोलनों को कोई सहायता प्रदान नहीं करने के लिए प्रोग्राम किया गया था, जबकि दूसरी स्थिति में, रोबोट ने विषय के पैर और पैर की गतिविधियों (रोबोट-सहायता प्राप्त आंदोलन) को नियंत्रित किया।
प्रत्येक प्रयोग एक ब्लॉक डिजाइन प्रतिमान एक मोटर कार्य (खेल खेल खेल – 30 एस) और आराम (30 एस) के वैकल्पिक चक्र शामिल पीछा किया, चित्रा 3 में सचित्र के रूप में. प्रत्येक चरण (खेल/खेल या आराम) की शुरुआत और निष्कर्ष को कंप्यूटर स्क्रीन के माध्यम से विषय को नेत्रहीन संकेत दिया गया था। बाकी चरण के दौरान, ठहराव का संकेत देने वाला एक संदेश प्रदर्शित किया गया था। प्रत्येक चक्र (खेल/खेल + आराम) की अवधि 60 सेकंड थी और इसे छह बार दोहराया गया, जिसके परिणामस्वरूप कुल रनटाइम 360 सेकंड (6 मिनट) था।
प्रतिभागियों ने “पिकनिक गेम” खेला, जिसका उद्देश्य कीड़ों को तौलिया तक पहुंचने और भोजन चुराने से रोकना था। इस खेल में निचले अंग आंदोलनों का एक क्रम शामिल था, जो एक निर्दिष्ट घरेलू लक्ष्य (प्रारंभिक स्थिति) से शुरू होता है और घर के लक्ष्य पर लौटने से पहले तीन बाहरी लक्ष्यों में से एक की ओर फैलता है। स्क्रीन पर, बाहरी लक्ष्यों को नेत्रहीन रूप से एनिमेटेड चलती कीड़ों के रूप में दर्शाया गया था, जिन्हें प्रतिभागियों तक पहुंचना और कदम रखना था। तीन बाहरी पहुंचने वाले लक्ष्य थे, प्रत्येक बेतरतीब ढंग से प्रत्येक आंदोलन के लिए एक आम घरेलू लक्ष्य के साथ, समान संख्या में प्रस्तुत किए गए थे। घर के लक्ष्य से बाहरी लक्ष्यों की स्थिति तक यात्रा करने के लिए पैर को जिस दूरी की आवश्यकता होती है, वह एक चाप बनाती है, जिसकी माप लगभग 26 सेमी है। मोटर कार्य को बहु-संयुक्त आंदोलनों के निष्पादन की आवश्यकता होती है, घुटने के फ्लेक्सन / एक्सटेंशन, प्लांटार फ्लेक्सन और डॉर्सिफ्लेक्सियन आंदोलनों के बीच समन्वय की मांग होती है।
fNIRS डेटा रिकॉर्डिंग को रोबोट द्वारा उत्पन्न ट्रांजिस्टर-ट्रांजिस्टर-लॉजिक (TTL) पल्स के माध्यम से गेम द्वारा प्रस्तुत दृश्य उत्तेजनाओं के साथ सिंक्रनाइज़ किया गया था। प्रत्येक चरण (खेल/खेल और आराम) की शुरुआत में दालें उत्पन्न हुईं। इस प्रकार, सभी समय नियंत्रण खेल द्वारा किया गया था, जिसने प्रत्येक आंदोलन को शुरू करने के लिए प्रतिभागी को दृश्य संकेत (लक्ष्य) प्रदान किए, मस्तिष्क गतिविधि रिकॉर्डिंग को चिह्नित करने के लिए एफएनआईआरएस प्रणाली को टीटीएल सिग्नल भेजे, और यदि प्रयोग द्वारा आवश्यक हो, तो आंदोलन सहायता शुरू करने के लिए रोबोट नियंत्रण प्रणाली को संकेत भेजे।
