This section presents representative event-related potentials in response to somatosensory stimulation resulting from facial skin deformation. The experimental setup is represented in Figure 1. Sinusoidal stimulation was applied to the facial skin lateral to the oral angle (See Figure 3A as reference). One hundred stretch trials were recorded for each participant with 12 participants tested in total. After removing the trials with blinks and eye movement artifacts offline on the basis of the horizontal and vertical electro-oculography signals (over ±150 µV), more than 85% of trials were averaged. EEG signals were filtered with a 0.5-50 Hz band-pass filter and re-referenced to the average across all electrodes. Figure 2 shows the average somatosensory ERP from selected representative electrodes. In frontal regions, peak negative potentials were induced at 100-200 msec post stimulus onset followed by a positive potential at 200-300 msec. The largest response was observed in the midline electrodes. Different from the previous studies of somatosensory ERP15-18, there is no earlier latency (<100 msec) potentials. This temporal pattern is rather similar to the typical N1-P2 sequence following auditory stimulation19. In comparison between the corresponding pair of electrodes in left and right hemisphere, the temporal pattern is quite similar probably due to the bilateral stimulation.
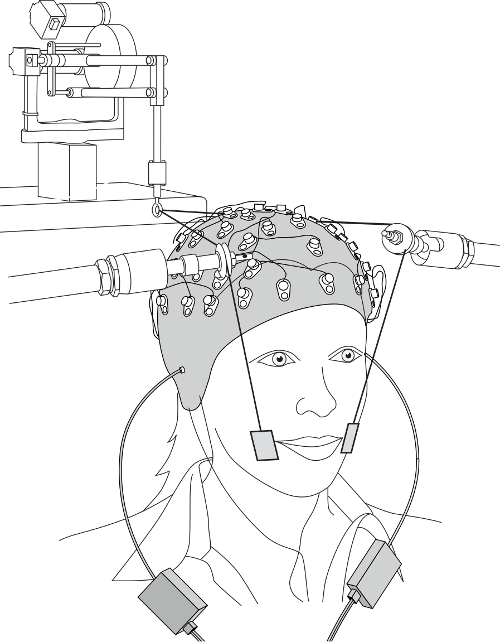
Figure 1. Experimental setup. Please click here to view a larger version of this figure.
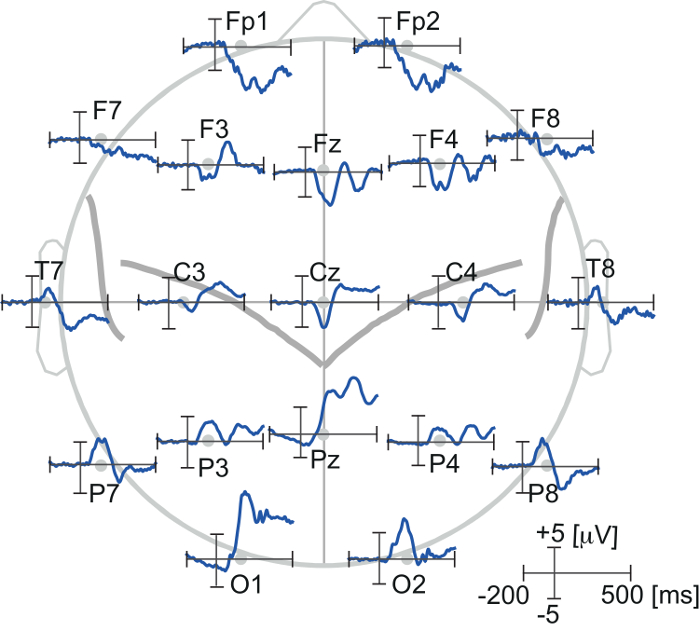
Figure 2. Event related potentials in response to somatosensory stimulation produced by facial skin stretch. The ERPs were obtained from representative electrodes. Please click here to view a larger version of this figure.
The first result shows how the timing of stimulation affects multisensory interaction during speech processing12. In this study, neural response interactions were found by comparing ERPs obtained using somatosensory-auditory stimulus pairs with the algebraic sum of ERPs to the unisensory stimuli presented separately. The pattern of auditory-somatosensory stimulations are represented in Figure 3A. Figure 3B shows the pattern of event-related potentials in response to somatosensory-auditory stimulus pairs (Red line). The black line represents the sum of individual unisensory auditory and somatosensory ERPs. The three panels correspond to the time lag between two stimulus onsets: 90 msec lead of the somatosensory onset (Left), simultaneous (Center) and 90 msec lag (Right). When somatosensory stimulation was presented 90 msec before the auditory onset, there is a difference between paired and summed responses (the left panel in Figure 3B). This interaction effect gradually decreases as a function of the time lag between the somatosensory and auditory inputs (see the change between the two dotted lines in Figure 3B). The results demonstrate that the somatosensory-auditory interaction is dynamically modified with the timing of stimulation.
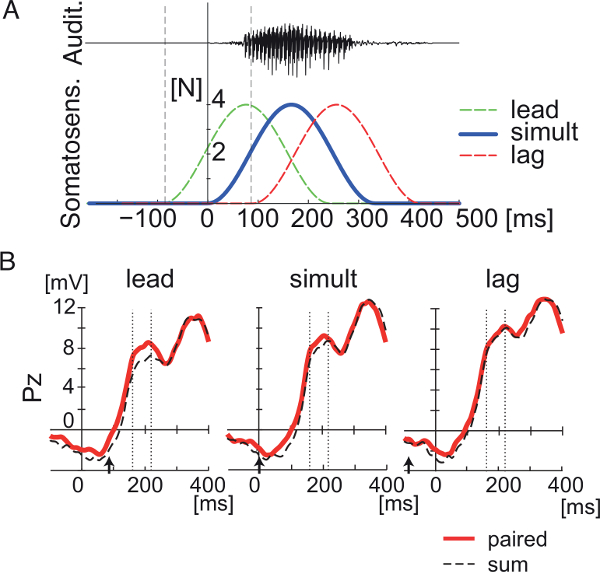
Figure 3. Event-related potentials reflect a somatosensory-auditory interaction in the context of speech perception. This Figure has been modified from Ito, et al.12 (A) temporal pattern of somatosensory and auditory stimulations. (B) Event-related potentials for combined somatosensory and auditory stimulation in three timing conditions (lead, simultaneous, and lag) at electrode Pz. The red line represents recorded responses to paired ERPs. The dashed line represents the sum of somatosensory and auditory ERPs. The vertical dotted lines define an interval 160-220 msec after somatosensory onset in which differences between "pair" and "sum" responses are assessed. Arrows represent auditory onset. Please click here to view a larger version of this figure.
The next result demonstrates that the amplitude of the somatosensory ERP increases in response to listening to speech13. The pattern of somatosensory stimulation is the same as noted above. Figure 4 shows somatosensory ERPs, which are converted into scalp current density20 in off-line analysis, at electrodes (FC3, FC5, C3) over the left sensorimotor area. Somatosensory event-related potentials were recorded while participants listen to speech in the presence of continuous background sounds. The study tested four background conditions: speech, non-speech sounds, pink-noise and silent13. The results indicated the amplitude of somatosensory event-related potentials during listening to speech sounds was significantly greater than the other three conditions. There was no significant difference in amplitude for the other three conditions. Figure 4B shows normalized peak amplitudes in the different conditions. The result indicates that listening to speech sounds alters the somatosensory processing associated with facial skin deformation.
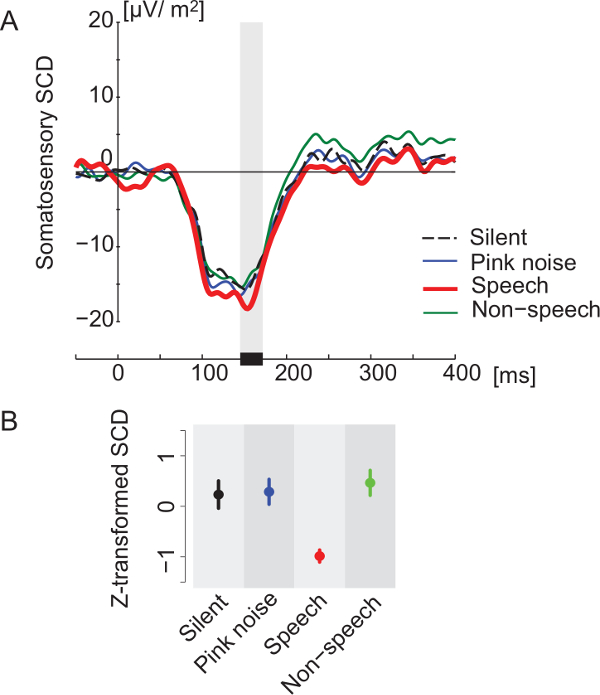
Figure 4. Enhancement of somatosensory event-related potentials due to speech sounds. The ERPs were recorded under four background sound conditions (Silent, Pink noise, Speech and Non-speech). This Figure has been modified from Ito, et al.13 (A) Temporal pattern of somatosensory event-related potentials in the area above left motor and premotor cortex. Each color corresponds to a different background sound condition. The ERPs were converted to scalp current density20. (B) Differences in z-score magnitudes associated with the first peak of the somatosensory ERPs. Error bars are standard errors across participants. Each color corresponds to different background sound conditions, as in Panel A. Please click here to view a larger version of this figure.