Flow diagram of the steps for developing the Au microelectrode-incorporated bioinspired soft robot
The aim of the soft robot design was to build a membrane capable of actuating a swimming movement with minimal complexity. The structure must be able to sustain strong flexions repeatedly over time (about 1 Hz) and be able to keep its shape while achieving a strong beating. By selectively photo crosslinking the polymer using photomasks, we fabricated a hierarchically structured scaffold comprised of a micropatterned PEGDA hydrogel layer, a flexible Au microelectrodes layer, and a micropatterned CNT–GelMA hydrogel layer. A schematic diagram and actual images of the fabrication procedure of the soft robot as described in the protocol are shown in Figure 1. Briefly, there were three main fabrication steps for the bioinspired soft robot with embedded Au microelectrodes: First, a micropatterned PEGDA hydrogel with incorporated Au microelectrodes was obtained by UV crosslinking using the 1st photomask (Figure 1A, B). Second, a multilayered construct composed of Au microelectrodes, the micropatterned CNT-GelMA, and the PEGDA hydrogels was fabricated by UV crosslinking using the 2nd photomask (Figure 1C). Finally, cardiomyocytes were seeded on the fabricated three-layer construct to provide actuation to the soft robot (Figure 1D).
Different designs of the soft robot
Regarding the shape of the soft robot, in the beginning, we designed two bioinspired shapes by biomimicking the patterns of two different aquatic animals. The first design was inspired by the appearance of a caraibic starfish (Figure 2A, B, C), because the starfish can be simplified into a two-dimensional (2D) object, has a hard backbone, and has a flexible part that joins together to move in the water, minimizing the required movement. The second device was based on the shape of a manta ray (Figure 2D, E, F) which is easy to reproduce in a 2D device. The manta ray can swim quickly using unique movements. We sketched the manta ray using basic geometric shapes with reduced complexity to be crosslinked during the photomask step. The electrode, placed along the midline of the structure, was designed with a wavy pattern, allowing for a better spread of electrical pulses and flexibility (Figure 2D). To develop the bioinspired soft robot, the manta ray-inspired shape was selected and tested thoroughly in this study.
The challenge of embedding the Au microelectrodes between CNT-GelMA and PEGDA hydrogels
The encapsulation of 200 nm thick Au microelectrodes in the fabricated robot body could locally control the construct by providing electrical stimulation. Although the UV crosslinking of both the CNT-GelMA and PEGDA hydrogel patterns directly on the electrode surface hampered the delamination of the electrodes, it guaranteed the successful incorporation of the electrode into the soft robot. However, after transferring the Au electrode on the PEGDA hydrogels, the Au electrode with a rectangular shape and wide width (>1 mm) was easily broken during the fabrication process due to the swelling of the PEGDA hydrogel (Figure 3A, B, C). Hence, we needed to make sure that the microelectrodes were successfully transferred to the PEGDA hydrogel and embedded between the CNT-GelMA and PEGDA hydrogels while intact. Therefore, Au microelectrodes with a serpentine pattern (thickness = 200 µm) were designed and fabricated with soft lithography. Phase contrast microscope pictures with different magnifications and stages were taken in order to inspect signs of fracture on the electrode after transportation on the micropatterned PEGDA hydrogels (Figure 3D, E, F).
The optimization of spacing between hydrogel micropatterns
The cardiomyocyte seeded CNT-GelMA layer showed different beating behavior according to the pattern distances (Figure 4A, B). This may be attributed to the different ways cells attached to the membrane's surface depending on the lines' distances. In the case of the 50 μm distance, the cells were too packed and did not have the desired organized configuration. The partially interconnected and not aligned cells on the wings were not all simultaneously contributing to the swimming movement. Hence, the force generated by the cardiomyocyte was not enough to bend the wings. At a 150 μm distance, the cells were very well aligned. However, they mainly sat in the groove and there were few interconnections among cells in the upper layers, resulting in weak beating. At a 75 μm distance, the cells were aligned in the bottom part and interconnected in the upper part, showing the strongest beating. In addition, to prevent irreversible complete rolling of the soft robot during the dynamic beating of the cardiomyocytes, we optimized the pattern spacing of the PEGDA hydrogel support layer to 300 µm (Figure 4C). Finally, following this parameterization process, we decided to focus more on the manta ray-shaped membrane with 300 μm distance PEGDA patterns and 75 μm distance CNT-GelMA patterns. Cardiac tissue on micropatterned PEGDA- and CNT-GelMA patterns was also shown by phase/contrast images and F-actin/DAPI confocal images (Figure 4B).
The analysis of movement of the cardiac tissue on micropatterned PEGDA- and CNT-GelMA hydrogels
To analyze the movement of the actuator, we took videos of the membrane without the Au microelectrodes while applying an electric field using a carbon rod electrode. Figure 4D shows some frames taken from the contraction records. It was clearly visible that the manta ray-shaped actuator was bending the wings as expected. The tail was balancing the structure by straightening up a little and the wings were strongly closing in the middle. Some of the membranes showed a rotating movement while contracting due to misaligned micropatterned CNT-GelMA and PEGDA hydrogels (Figure 4E and Video 1). In this case, the movement was less defined compared to the previous one but the contraction was still strong enough to allow actuation of a rotating movement. The total time to complete an entire circle was around 45 s.
The characterization of the cardiomyocytes on the multilayered soft robot and control of beating behavior by electrical stimulation
After seeding and maturation of cardiomyocytes on the bioinspired robotic system (Figure 5A), alignment of the cardiac tissue along the direction of the CNT-GelMA patterns was observed (Figure 5B-E) by both F-actin/DAPI and sacromeric/connexin-43/DAPI immunostaining. Confocal fluorescence images showed well-elongated and aligned cardiomyocytes on the CNT–GelMA hydrogel pattern (Figure 5B, C). Partial uniaxial sarcomere alignment and interconnected sarcomere structure was observed on the patterned areas (Figure 5D). Well-interconnected sarcomere structures of cardiac tissues located directly above the microelectrodes were also observed (Figure 5E). To assess the bioinspired soft robot, we detected its function using two methods: First, we applied a biphasic electrical pulse to the soft robot though carbon rod electrodes for artificial tuning and controlling the beating behavior. Second, we connected two copper wires to the outermost end of the Au electrode for generating an electrical signal through the whole robot construct. When we applied an electrical stimulation through the external carbon electrode or copper wire connected to the Au electrode, the excitation threshold voltage was different at different frequencies (0.5, 1.0, and 2.0 Hz, Figure 5F).
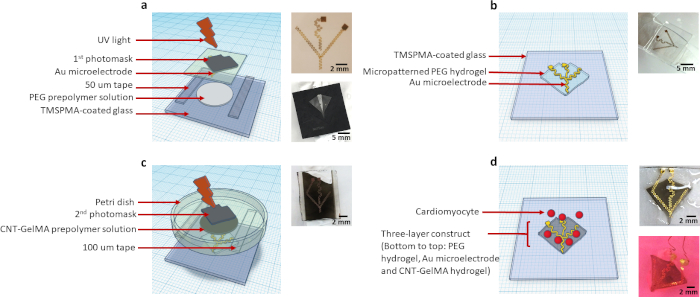
Figure 1: Schematic diagram and actual images depicting the fabrication process of the bioinspired multilayered soft robot electrically controlled by electrical signal via the integration of flexible Au microelectrodes. (A) Patterning and crosslinking of the PEGDA hydrogel using the 1st photomask. (B) Micropatterned PEGDA hydrogel with the encapsulated Au microelectrodes on the TMSPMA glass obtained after step (A). (C) Crosslinking of the CNT-GelMA patterned hydrogel using the 2nd photomask. (D) Seeding of the cardiomyocytes on the multilayered construct. Please click here to view a larger version of this figure.
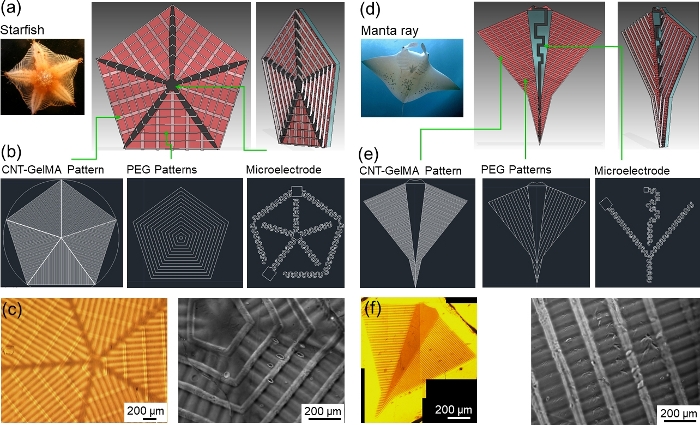
Figure 2: Design of the bioinspired soft robots. (A) Real starfish picture and different views of the three-dimensional (3D) CAD model pointing out the components and stripes. (B) Mask design for CNT-GelMA pattern, PEGDA pattern, and Au microelectrodes for the starfish shape. (C) Optical microscope image of the micropatterned CNT-GelMA and PEGDA patterns for the starfish shape. (D) Real manta ray picture and different views of the 3D CAD model pointing out the components. (E) Mask design for CNT-GelMA pattern, PEGDA pattern, and Au microelectrodes for the manta ray shape, adapted with permission from Su Ryon et al.10. (F) Optical microscope image of the micropatterned CNT-GelMA and PEGDA patterns for the manta ray shape. Please click here to view a larger version of this figure.
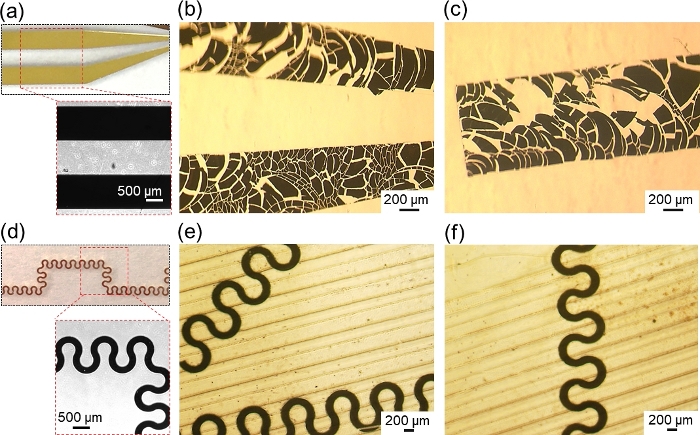
Figure 3: Design of the flexible Au microelectrodes. (A) Photograph of fabricated Au electrodes with rectangular shapes and wide widths. (B and C) Optical microscope images of Au electrodes that failed to transfer to the PEGDA hydrogels. (D) Wavy Au microelectrodes before and after (E and F) being transferred on the micropatterned PEGDA hydrogel. Please click here to view a larger version of this figure.
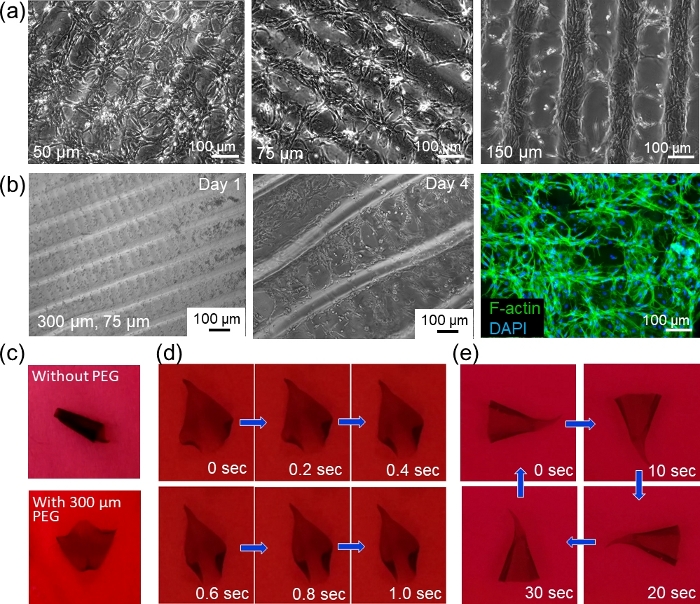
Figure 4: The optimization of micropatterned PEGDA and CNT–GelMA hydrogels and movement analysis of soft robots. (A) Optical images of cardiomyocytes on the CNT–GelMA hydrogel pattern with 50, 75, and 150 µm spacing. (B) Optical images and F-actin/DAPI staining of cardiomyocytes on the PEGDA- and CNT-GelMA hydrogel patterns with 300 µm and 75 µm spacing, respectively. (C) The rolling morphologies of the bioinspired constructs with and without the micropatterned PEGDA hydrogel with 300 µm spacing. (D) Frames of the free-standing bioinspired soft robot video recorded while applying the electric stimulus. (E) Collage of four different frames taken from the video recording the rotating movement of the soft robot. Please click here to view a larger version of this figure.
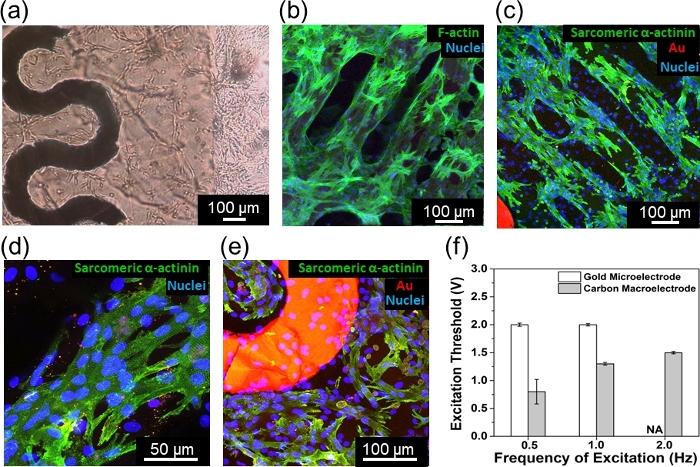
Figure 5: Characterization of cardiomyocytes on Au microelectrode-incorporated soft robot and control of beating behavior by electrical stimulation. (A) Optical microscope image of the cultured cardiomyocytes on the Au microelectrodes encapsulated between PEGDA and CNT-GelMA hydrogels. (B) F-actin/DAPI fluorescence image showing the well-elongated and aligned cardiomyocytes on the CNT–GelMA hydrogel micropattern. (C–E) Confocal fluorescence images showing sarcomere alignment and interconnected sarcomere structures on the fabricated soft robot: (C and D) cultured cardiomyocytes on the CNT–GelMA hydrogel micropattern, and (E) near the Au microelectrodes. (F) Required excitation threshold voltage at different frequencies (0.5, 1.0, and 2.0 Hz) when applying electrical stimulation via carbon rod electrode and embedded Au microelectrodes. Please click here to view a larger version of this figure.
Video 1. Please click here to view this video (Right click to download).
Supplementary File 1. Please click here to view this file (Right click to download).
Supplementary File 2. Please click here to view this file (Right click to download).
Supplementary File 3. Please click here to view this file (Right click to download).