

Summary
我们提出了一个小巧的反射全息数字化系统(CDHM)MEMS器件的检测和鉴定。论证采用发散输入波提供自然几何放大倍率的镜头,无设计。静态和动态的研究介绍。
Introduction
微纳米物体的计量是为行业和研究人员具有重要意义。事实上,对象的小型化代表了光学测量了新的挑战。微机电系统(MEMS)通常定义了微型机电系统,并且通常包括组件,例如微传感器,微致动器,微电子和微结构。它已经发现,在不同的领域,如生物技术,医药,通信和传感1多种应用。近日,日益复杂以及测试对象的逐步小型化功能要求的适合表征技术的MEMS的发展。高通量制造这些复杂微系统的需要的先进在线测量技术的实施,量化特征参数和所造成的工艺条件2有关的缺陷。例如,几何参数的偏差在MEMS器件ETERS影响系统性能,并具有待表征。此外,行业需要高分辨率测量性能,如全三维(3D)测量,看,高成像分辨率的大场,并实时分析。因此,有必要保证可靠的质量控制和检验过程。此外,它需要测量系统是在生产线上容易地实现的,从而相对紧凑要在现有的基础设施安装。
全息,这是首次由的Gabor 3引入,是一种技术,它允许一个对象的全量化信息恢复通过记录一个参考和一个目的波到感光介质之间的干涉。在此过程中被称为记录,一个场的振幅,相位和偏振被存储在介质中。那么对象波场可以通过参考光束发送到我的恢复dium,被称为全息图的光学读取的处理。由于传统的探测器只记录了波的强度,全息一直很感兴趣的话题在过去五十年,因为它可以访问更多的信息的电场。然而,传统的全息几个方面让它不切实际的行业应用。实际上,感光材料是昂贵的并且在记录过程通常需要高度的稳定性。在高清晰度摄像机传感器的改进,如电荷耦合器件(CCD)已经开通的数字计量的新方法。其中的一个技术被称为数字全息4。在数字全息(DH)时,全息图记录在照相机(记录介质)上和数值的过程被用于重建的相位和强度信息。该记录和重建中所示连接 :与常规全息,可以经过两个主要方法获得的结果古尔1。然而,如果记录是类似于常规全息,重建是唯一的数值5。数值重建过程示于图2中 。两个程序都参与了重建过程。首先,对象波场从所述全息图检索。全息图被乘以一数值基准波得到在全息图平面的物体波前。其次,复合对象的波阵面进行了数值传播到图像平面。在我们的系统中,采用卷积方法6进行此步骤。得到的重建场是一个复杂的函数,因而相位和强度可以被提取提供感兴趣对象上的定量高度信息。全场信息存储在全息方法的能力,并利用计算机技术进行快速的数据处理提供了实验配置更多的灵活性和显著增加SPEE实验过程的研发,开辟新的可能性,开发署作为MEMS和微系统7,8动态计量工具。
相衬成像的数字全息现在是公认的和十几年前9首次提出。事实上,通过组合数字全息和显微镜显微设备的调查已经在许多研究10,11,12,13进行。基于高相干性14和低相干15源17的几个系统,以及不同类型的几何13,16的, (线,偏轴,公共路径...)已提交。另外,在线路数字全息先前已经在MEMS器件18,19的表征使用。然而,这些系统通常是难以实现和笨重,使得它们不适合于工业应用。在这项研究中,我们提出了一种基于AXI关闭一个紧凑的,简单的和镜头自由制度s的数字全息能够为实时MEMS检测和表征。紧凑型数字全息显微镜(CDHM)是一个镜头少数字全息系统研发并获得专利,获得微镜面尺寸物体的三维形态。在我们的系统中,一个10毫瓦,高度稳定的,温度控制的二极管激光器在638纳米工作耦合到一个单模式光纤。正如图3所示,从光纤发出的发散光束被分成由一个光束分离器的基准和一个物体光束。参考光束路径包括一个倾斜的反射镜来实现离轴几何形状。物体光束被散射和被样品反射。两个光束干涉CCD上给予全息图。印到图像的干涉图案被称为空间载波并允许定量相位信息,只有一个图像的恢复。数值重建是使用一个共同的傅立叶变换和卷积算法作为站进行特德以前。镜头的更少的配置具有几个优点使它吸引力。由于没有透镜使用时,输入光束是发散波提供自然几何放大,从而提高了系统的分辨率。此外,它是自由在典型的光学系统中所遇到的像差。如可以在图3B中可以看到,该系统可以做得紧凑(55x75x125毫米3),轻量(400克),并且因此可以容易地集成到工业生产线。
Subscription Required. Please recommend JoVE to your librarian.
Protocol
1.测量的前期准备
注意:用于实验的样品是MEMS电极。金电极被制作用剥离工艺在硅晶片上。样品是18毫米×18毫米晶圆与周期性结构(电极)用1mM周期
- 登录到日志使用该系统之前。
- 打开电脑,激光和翻译级功率。
- 放置在MEMS电极/微膜片样品。
- 放置在MEMS样品中使用镊子将样本保持器的中间。
- 调整样品架,以在光束路径中的电极的位置。的视图的最大测量场由相机传感器尺寸限定。它是为2.3mm×1.8 mm的矩形。
- 使用垂直方向机动阶段,移动系统近似1.5厘米远离样品。
2.软件设置调整
- 打开手机沃导航软件。手机沃导航是我们的C ++开发的内部程序。
- 点击成像源按钮选择实验适当的相机。选择黑白CCD摄像机。避免彩色照相机在此设置中,因为使用了单色二极管激光器。此外,对于相同数量的像素,分辨率将使用彩色摄像机时更低。
- 在设备设置选项卡,选择Y800(1280×960)视频格式和每秒的视频速率15帧。
- 点击黄色的播放按钮来启动相机。与印条纹(全息图)对象的图像应该会出现。
- 调整优化增益和曝光参数,如果需要的话,以避免图像的饱和度。
- 使用实时视频窗口摄影机视图,调整样品位置精确选择区域,调查的样本。
- 打开设置选项卡。
- 在配置选项卡,选择表面的类型(反射或透明)LA的,波长相机的丝氨酸,和像素大小。激光是二极管激光在633nm工作。摄像机的像素尺寸是4,650纳米。样品是如此反射模式应该选择镜面的MEMS电极装置。
注:CDHM配置允许被测定仅反射面。然而,该软件还可以用于当不同的数字全息系统被用于13来测量透明样品。在此设置的变化改变从相位高度计算公式。的确,光程差计算为透明的样品稍有不同,因为它包括对象折射率。 - 选择卷积重建算法和设置重建距离为零。选择的1或2个重建步骤。
注意:重建距离参数可以稍后通过考虑从全息图得到的强度图像和使用自动聚焦来限定。重建步骤定义的数目用于实现菲涅耳积分和模拟波束传播步骤。第一种方法计算积分一次作为单个傅立叶变换。将2步将评估两倍积分。这增加了更多的灵活性,在网格间距,但在计算上是低效率的20。 - 在后处理选项卡,选择所需的展开算法得到最终解开形象。选择质量映射算法。
注:在软件中,Goldstein和质量之间的选择映射算法可以进行。后来呈现出强劲,快速的空间相位展开。质量映射算法是基于引导相如21所述的展开。
- 在配置选项卡,选择表面的类型(反射或透明)LA的,波长相机的丝氨酸,和像素大小。激光是二极管激光在633nm工作。摄像机的像素尺寸是4,650纳米。样品是如此反射模式应该选择镜面的MEMS电极装置。
3.数据采集
- 按傅立叶变换图标打开傅立叶频谱窗口。其中0级和两个+ 1,-1订单应该会出现。如果不是这种情况,检查样品是在合适的位置,并调整抢占d再次曝光时间。
- 停止实时测量模式。通过使用过滤器工具选择衍射级(正或负频率)中的一个。所选择的区域应当足够大,使得所需要的相位恢复的所有频率都存在。再次打开实时模式。
注意:负顺序的选择将只影响的相位的符号中的最后的结果, 也就是,最后的 3D图像将被反转。 - 打开阶段窗口。检查未启用的展开模式。与包裹条纹印对象的灰色相位图像应该出现。
- 利用电动垂直阶段,以减少相图像中的条纹的数目。当只有1或2条纹留在图像上,停止机动阶段。
注意:该系统是基于干涉。因此,它是对振动敏感。移动z方向机动阶段之后,用户应该等待1或2秒的包裹相位图像出现agai前ñ。同样重要的是在测量过程中,以避免振动,以得到稳定的相位图像。 - 点击自动对焦按钮22找到最好的重建距离。一个可能需要使用自动对焦多次,直至强度图像显示锐利和清晰的接近最佳重建距离。如在22中所述的自动聚焦是基于一个高效和时间有效的角谱方法。
注意:聚焦滑动条可用于微调。然后,点击中央对焦按钮来记录当前重建的距离。有时看起来最重点不是具有自动对焦选项中。在这种情况下,手动输入重建距离找到最好的聚焦。 - 启用展开的模式,通过点击去包裹按钮查看展开的相位图像。
4,数据可视化和分析测量静
- 打开3D图像窗口中看到最终的3D样品的图像。使用可用的选项,观察最终的结果(旋转,彩色地图,刻度显示...)。
- 单击平铺窗口按钮安排窗口在不重叠,并显示所有的测量窗口。
- 使用线标尺上绘制的展开相位图像上感兴趣的区域的线。在线路图形窗口中,感兴趣的区域的横截面剖面图,可以观察到。使用两个绿色线标记物,以提取对象( 图5)的近似高度。
表面粗糙度也可以在样品的平坦的顶部得到的。 - 保存.JPEG格式,最后阶段的形象,如果需要将其导入到其他软件。
5.样品制备和数据分析的动态测量
- 放置在一个供热站板微隔膜。样品将不从板直到实验结束被移除。
- 记录的MICR的全息图Ó膜片在由以下第2和3将用作变形分析的参考上述过程环境温度。
- 保存在计算机上的相位数据。
- 打开实验室加热板。
- 利用温度旋钮,变化在50℃的步骤,从50℃至300℃的温度。对于每个温度步,保存.jpeg格式的相位图图像。
- 减去从记录获取变形数据的其他相位图的初始环境温度的相位图。
注:该后处理工序可以用简单的MATLAB代码来实现。所得到的不同阶段被装入MATLAB和执行简单的矩阵减法。然后将不同的变形阶段的横截面图可以得到。
Subscription Required. Please recommend JoVE to your librarian.
Representative Results
上述协议被设计来检查和表征使用CDHM系统MEMS和微型设备。在我们的系统中,单模式光纤耦合到二极管激光器在633纳米波长下操作。由于发散光束的配置,它向物体光束和参照光束路径匹配,以获得可被重构的全息图是很重要的。这是通过样品的相对于该系统小心垂直定位来实现的。在计算出的包裹相位图像,条纹的数目是通过改变系统高度位置降低到最低限度。它确保了光路被匹配。 图4示出了从使用CDHM后的样品的正确的轴向定位的测量获得的结果。该数据是实时从单个图像中获得。在这个实验中,包括在不同的高点和周期的光栅图案的美国空军目标被选择作为样品。如上述说明的那样,相位图( 图4A),从单一的图像全息图萃取。特定图案的线图中示出在图4A中。黄线( 图4A)表示样品上的横截面位置。两个绿色标记线被用于估计样品高度的绝对值。为了验证数字全息系统的结果,样品的原子力显微镜(AFM)调查进行。相同的样品面积的横截面示于图4B。为相同的结构,为2.1纳米的高度差的原子力显微镜和CDHM测量之间找到。因此,这两种方法之间的比较表明了CDHM的能力。
具体表征MEMS装置中,MEMS电极的三维静态调查进行。该装置是用金电极PATT由硅制成的采用剥离工艺erned。一般来说,基于硅MEMS使用捏造敏感的方法,例如蚀刻或剥离工艺。在这两种情况下,以量化样品形貌的在制造过程中的变化的能力是非常重要的。 图5示出了用于该样品的测定结果。样品的全3D形态可被观察到。横截面线( 图5A)图显示,可用于检查的深度图。通道的深度被发现是632纳米,也由CDH设置的电极之间的横向距离示出,它是能够提供所述样品的完整定量三维分析。在另一维( 图5B)作图显示电极证明该CDHM也适合粗糙度测量的表面粗糙度。
在MEMS表征静态应用程序克不动产资产价值,但最有趣的过程,需要动态检查。通过选择适当的记录方法中,CDHM系统能够为静态和动态情况下检查和表征微器件; 图6显示了一系列在不同温度下得到的微膜片的三维数据。隔膜是由一个薄板粘接到一个SOI(绝缘体上硅)晶片样品制成。将样品放置在一个加热板上。为了测量热变形,将温度在50℃变化的步骤,从50℃开始,直至300℃。对每个温度进行全息图的数值重建。在环境温度下在全息图和相位已经预先记录。它被用作参考相位。变形状态(热负荷)和基准状态(环境温度)的减法给出变形图。从而对d的热变形的完整场分析 iaphragm被获得。 图6G突出了不同温度下的变形。在这种情况下,线图表明,相比于在静态测量得到的结果的测定表明显著粗糙度。

图1.数字全息记录和重建进程方案 。图中显示了两个步骤的过程的细节,以获得一个物体的三维图像。录制过程和由此产生的全息图的一幅图所示。从物体的全息图,振幅和相位(模2π)被提取。相位解开除去2π模糊性。接着进行三维重建。 请点击此处查看该图的放大版本。
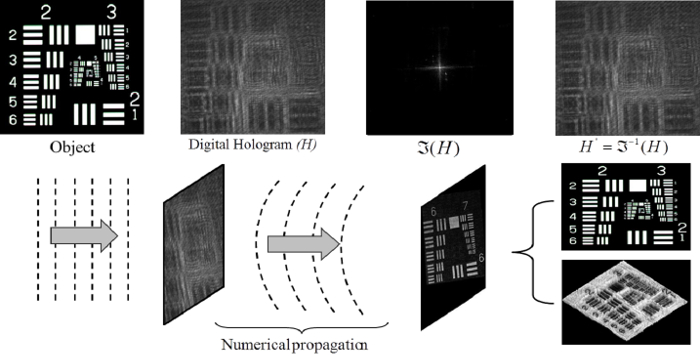
图2.重建过程的详细方案 。该图示出了重建过程方案的示意图。数字全息图记录和快速傅立叶变换(FFT)的执行图像。在光谱中选择有用的信息之后,图像被傅里叶变换回来。然后数值代参考光束和全息图的传播模拟检索对象的相位和幅值独立完成。 请点击此处查看该图的放大版本。

图3. CDHM设置的示意图。图中显示了CDHM设置的示意性表示(

图4. CDHM和原子力显微镜(AFM)是美国空军的目标高度测量值之间的比较。此图显示了从美国空军的目标使用CDHM(A)和原子力显微镜获得的微观结构线图(AFM )(B)。 请点击此处查看该图的放大版本。

一个MEMS埃尔图5.三维轮廓和线图 ectrode设备。使用CDHM一个硅MEMS电极装置的测量结果。线图与用来估计样本的深度在X方向(A)特定的横截面的绿色标志和y方向(B)和全视场图像显示3D效果(C)。 请点击此处查看大图版本这个数字。

图6.热负荷下一个微型振膜变形研究 。照片下显示不同的热负荷(AF),并在一特定截面(G)的变形演化线图一个微型振膜的3D变形图像。T =“_空白”>点击此处查看该图的放大版本。
Subscription Required. Please recommend JoVE to your librarian.
Discussion
在这次审查中,我们提供了一个协议,通过紧凑的系统依靠数字全息精确地恢复不同的MEMS器件的定量形态。在静态和动态模式的MEMS表征证明。获得微通道的MEMS的定量3D数据。为了验证该系统的准确度,结果已在CDHM和原子力显微镜进行比较。良好的协议发现意味着数字全息可以是三维成像的可靠技术。结果表明,该系统能够10纳米的深度分辨率。此外,在微通道中获得的结果表明,该系统可在MEMS表征用作样品的形貌可以在MEMS制造过程进行控制。此外,使用该CDHM得到的倍率对应于什么应该用于MEMS尺寸(4.2倍)。该系统还能够满场的测量。这是当一个相当大的资产的COM削到通常用于微机电系统的检测技术,如共焦显微镜,这需要很长的扫描测量。此外,该系统的横向分辨率可容易地通过改变红色二极管激光器到UV激光提高。最后,该系统的高灵敏度允许粗糙度的测量。
上的微膜片动态测量表明,CDHM是当施加热或电负载中的MEMS器件来观察变形的适当的工具。使用双重曝光方法来构建变形图,进行微膜片的动态变形研究。人们可以看到,膜片形状可以实时仔细观察。这一结果是可能的,因为三维形态仅使用一个图像来计算。然而在从静态测量,观察什么不同的,用热负荷动态测量显示异常粗糙的轮廓。的确,人们可以考虑行情节的sh相比静态测量结果时, 图6G自己粗糙。由于该系统能够解决结构小至10纳米,粗糙度似乎不被从对象来。一种可能的解释可以是通过加热阶段中产生的热扰动两个波之间的干扰和影响对象波的波前。此外,一直在使用使用电负荷12 MEMS的CDHM进行动态研究,这种粗糙似乎并不出现。
该协议包含几个关键步骤,如样品垂直定位,重建距离的选择,该重建法,无振动环境和条纹的CCD上的质量。以确保可靠和稳定的结果,所有这些步骤应仔细进行。例如,物体光束路径必须是相同的基准之一, 例如 ,给系统的采样距离是至关重要获得CCD上明确条纹。此外,该数值重建距离应很好的调整,以确保该全息图在图像平面重建。最后,超过一半的激光的波长的尖锐结构更高的样品将导致不可靠的相位的结果。事实上,相跳可能出现因相位展开误差。
这些结果说明了CDHM的能力来执行MEMS器件的三维定量深度测量。的确,对于如在MEMS和微电子工业中遇到反射面,所述CDHM是可在原位工艺测量被用于以及表征和检测微系统器件的便携式系统。一个验证研究表明,由系统所获得的结果是高度可靠的。所述CDHM覆盖更大的扫描区域和可进行实时测量。这是一个重大的优点与其他技术相比,如AFM或共焦万分之一副本需要费时的扫描。除了提出的结果,该系统可以给在其它MEMS工艺宝贵信息。例如,它具有测量使用时间平均和强度的图像观察的MEMS器件11的谐振模式非常快的处理的经过验证的能力。今后的工作将集中在影像实时MEMS悬臂的电力负载下挠度的变化。
Subscription Required. Please recommend JoVE to your librarian.
Materials
| Name | Company | Catalog Number | Comments |
| 2 MP Camera | Imaging Source | DMX 41BU02 | used to record the hologram. 4.65 microns pixel size |
| Motorized X,Y,Z Translation Stage | Zaber Technology | TLS28-M | Holder for the system |
| Beam splitter | Edmund optics | 49-003 | Cube Beam splitter. Separate and recombine the object and reference beam |
| Laser | Micro Laser Systems, Inc. | SRT-F635S-20/OSYS | Diode laser |
| Mirror | Edmund Optics | #43-412-566 | 1" Dia. Protected Gold, λ/20 Flat Zerodur |
| monomode Fiber | Thorlabs | S405-XP | Single Mode Optical Fiber, 400 - 680 nm, Ø 125 µm Cladding |
| Sample holder | Edmund Optics | #39-930 | Ideal Positioning Platform, ±35 mm Travel in Both X and Y |
| Hotplate | Thermolyne Mirak hotplate | Barnstead International HP72935-60 | temperature range 40-370 °C |
| Holoscope Software | d'Optron Pte Ltd | software developed by the NTU researchers |
References
- Maluf, N. An introduction to Microelectromechanical Systems. , Artech House. Boston. (2002).
- Novak, E.
- Gabor, D.
- Schnars, U., Jüptner, W. Direct recording of holograms by a CCD target and numerical reconstruction. Appl. Opt. 33 (2), 179-181 (1994).
- Schnars, U., Jüptner, W. Digital recording and numerical reconstruction of holograms. Meas. Sci. Technol. 13 (9), 85-101 (2002).
- Pedrini, G., Schedin, S., Tiziani, H. Lensless digital holographic interferometry for the measurement of large objects. Opt. Commun. 171 (1-3), 29-36 (1999).
- Dubois, F., Joannes, L., Legros, J. C. Improved three-dimensional imaging with a digital holography microscope with a source of partial spatial coherence. Appl. Opt. 38 (34), 7085-7094 (1999).
- Lei, X., Xiaoyuan, P., Jianmin, M., Asundi, A. K. Studies of digital microscopic holography with applications to microstructure testing. Appl. Opt. 40 (28), 5046-5051 (2001).
- Cuche, E., Bevilacqua, F., Depeursinge, C. Digital holography for quantitative phase-contrast imaging. Opt. Lett. 24 (5), 291-293 (1999).
- Qu, W., Yu, Y., Chee Oi, C., Raj Singh, V., Asundi, A. Quasi-physical phase compensation in digital holographic microscopy. J. Opt. Soc. Am. 26 (9), 2005-2011 (2009).
- Schedin, S., Pedrini, G., Tiziani, H. J., Santoyo, F. M. Simultaneous three-dimensional dynamic deformation measurements with pulsed digital holography. Appl. Opt. 38 (34), 7056-7062 (1999).
- Lei, X., Xiaoyuan, P., Jianmin, M., Asundi, A. K. Development and validation of digital microholo interferometric system for micromechanical testing. Proc. SPIE. 4778, 11-20 (2002).
- Qu, W., Bhattacharya, K., Choo, C. O., Yu, Y., Asundi, A. Transmission digital holographic microscopy based on a beam-splitter cube interferometer. Appl. Opt. 48 (15), 2778-2783 (2009).
- Potcoava, M. C., Kim, M. K. Fingerprint biometry applications of digital holography and low-coherence interferography. Appl. Opt. 48 (34), 9-15 (2009).
- Kolman, P., Chmelìk, R.
- Lee, M., Yaglidere, O., Ozcan, A. Field-portable reflection and transmission microscopy based on lensless holography. Biomed. Opt. Express. 2 (9), 2721-2730 (2011).
- Mico, V., Zalevsky, Z., Garcìa, J. Common-path phase-shifting digital holographic microscopy: a way to quantitative phase imaging and superresolution. Opt. Commun. 281 (17), 4273-4281 (2008).
- Singh, V. R., Miao, J., Wang, Z., Hedge, G. M., Asundi, A. Dynamic characterization of MEMS diaphragm using time averaged in-line digital holography. Opt. Commun. 280 (2), 285-290 (2007).
- Singh, V. R., Anderi, A., Gorecki, C., Nieradko, L., Asundi, A. Characterization of MEMS cantilevers lensless digital holographic microscope. Proc. SPIE. 6995, 69950F-1 (2008).
- Schmidt, J. D. Numerical Simulation of Optical Wave Propagation with Examples in MATLAB. SPIE PRESS BOOK. , (2010).
- Zhao, M., Huang, L., Zhang, Q. C., Su, X. Y., Asundi, A., Qian, K. M. Quality-guided phase unwrapping technique: comparison of quality maps and guiding strategies. Appl. Opt. 50 (33), 6214-6224 (2011).
- Wang, Z., Qu, W., Yang, F., Wen, Y., Asundi, A. A new autofocus method based on angular spectrum method in digital holography. Proc. SPIE. 9449, 2-7 (2015).
