Figure 2 shows the analysis of asymmetry during the locomotor tasks for a single representative subject. The values were calculated for all conditions using Equation 1 and 2 from all subjects individually (Figure 2) and from composite data of 8 female Sprague-Dawley rats (250 – 400 g, Figure 3). Generally, the modulation of the forelimb stance phase was lesser for the side to which the locomotion condition was favored (short ISL), consistent with the notion that the stance phase on the preferred side (long ISL) tended to occupy a greater portion of the step cycle as compared to the favored limb as the speed of locomotion decreases.
The difference between corresponding asymmetry indices obtained from conditions L9R6 and L6R9 (ΔAI) were tested with a one-way ANOVA (α = 0.05) and post-hoc t-tests with conservative Bonferroni correction (adjusted α = 0.0125) using anova1 and multcompare functions in Matlab. Overall, the difference between groups was significant (p = 0.002). The anterior horizontal asymmetry index (ΔaAIh) corresponding to the asymmetry between forelimbs was significantly different (p = 0.006) between the left-favored (L6R9) and the right-favored (L9R6) conditions (Figure 4A). The difference between the conditions for the right vertical asymmetry index (ΔrAIv) showed a trend, but it was not significantly different from zero (p = 0.031, α = 0.0125). Similarly, we found a significant difference (p = 0.020, α = 0.05) in the diagonality index between two asymmetric conditions (Figure 4B). ANOVA testing found no differences between DI in different tasks, but there was only a single post-hoc t-test, which required no additional alpha correction.
As this method relies on the animals' natural ability to solve the asymmetric foot placement, some animals may exhibit gallop-like behavior where the posterior limbs were simultaneously in swing. This gait was observed in 3 animals, and the behavior was excluded from further analyses.
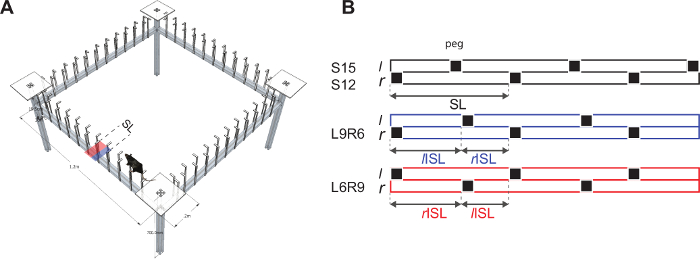
Figure 1. Walkway Model. (A) Schematic of the walkway used for the symmetric and asymmetric gait tasks. (B) Peg arrangement setting the right (rISL) and left (lISL) inter-stride lengths in relation to the stride length (SL). The four conditions include a symmetrical control locomotor task of stride length (SL) of 15 cm (SL15), a symmetrical locomotor task representing a 20% reduction in SL and preferred speed (SL12), a left limb preferred (L9R6) and a right limb preferred (L6R9) locomotor task. Please click here to view a larger version of this figure.
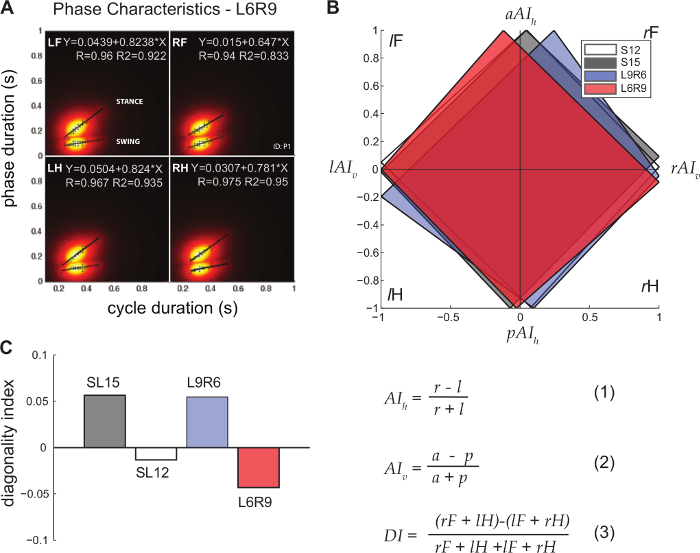
Figure 2. Calculation of Asymmetry and Diagonality Indices. (A) The relationship between stance or swing phase duration (y-axis) and cycle duration (x-axis) for left-limb favored gait (L6R9) is represented by the regression analysis and the heat map of data point density. The phase characteristics were represented with the stance phase linear regressions using the slope-intercept equations. The insets correspond to the left forelimb (LF), right forelimb (RF), left hindlimb (LH) and right hindlimb (RH) heat maps. (B) Asymmetry index calculated as shown in Equations (1) and (2), where r, l, a and p –slopes of the stance phase linear regressions, as shown in (A) for the right, left, anterior and posterior limbs, respectively. lAIv, rAIv, aAIhand pAIh– left-vertical, right vertical, fore-horizontal and hind-horizontal asymmetry indices, respectively, calculated for all four conditions described in Figure 1. (C) Diagonality indices (DIs) calculated as shown in Equation (3) for all four conditions described in Figure1. lF, rF, lH and rH –left forelimb, right forelimb, left hindlimb and right hindlimb stance phase linear regression slopes. Please click here to view a larger version of this figure.
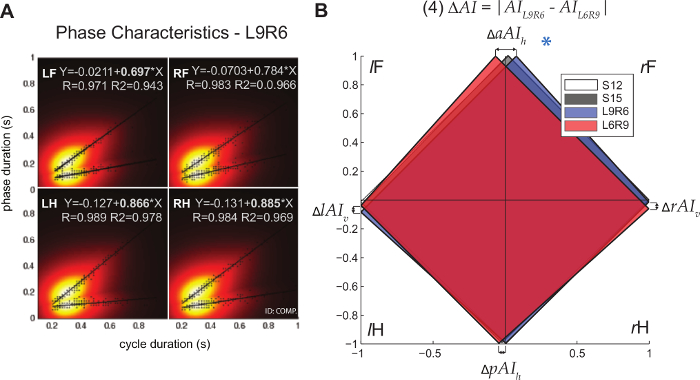
Figure 3. Composite Data for Asymmetry and Diagonality using Phase Characteristics from All 8 Subjects. (A) Heat map representing the distribution of stance or swing versus cycle duration for left-limb favored gait (L9R6). The phase characteristics of the stance phase linear regression were calculated as in Figure 1A, and are represented by the slope-intercept formula inset. (B) Asymmetry index calculated as shown in Figure 1B. ΔlAIv, ΔrAIv, ΔaAIhand ΔpAIh– left-vertical, right vertical, anterior-horizontal and posterior-horizontal asymmetry index differences, respectively, calculated for all four conditions as described in Equation 3 by subtracting the corresponding asymmetry indices of the right-favored gait (L6R9) from the left-favored gait (L9R6) conditions. Asterisk – statistical significance as calculated by the Bootstrap method. Please click here to view a larger version of this figure.
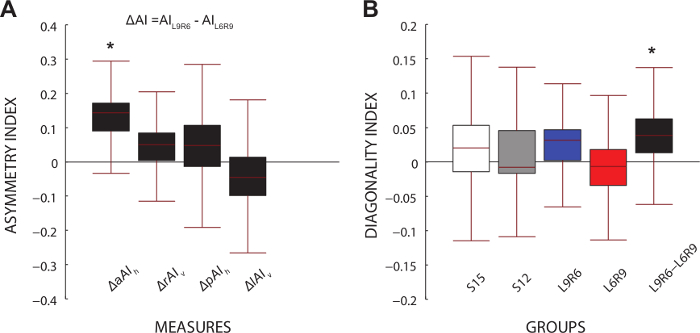
Figure 4. Analysis of Asymmetric Measures. (A). Absolute difference in asymmetric indices (AI) between conditions L9R6 and L6R9 was tested with one-way ANOVA with post-hoc t-test analysis adjusted with the Bonferroni correction for multiple tests. The change in forelimb asymmetry (ΔaAIh) between L9R6 and L6R9 was significant. (B) Analysis of distribution of diagonality indices (DI) of conditions S15, S12, L9R6 and L6R9 using one-way ANOVA with the post-hoc t-test of the difference between asymmetric tasks (black). Please click here to view a larger version of this figure.
