قدمت تقنية متن التذبذب ورد فعل لتقدير خصائص بالقصور الذاتي من الأطراف الاصطناعية تحت الركبة. تم التحقق من صحة هذا النظام وثبت أن تكون موثوقة عند تقدير خصائص بالقصور الذاتي من المواد الصلبة الهندسية المعروفة (الملحق أ). وقدرت بدلة أطرافهم خصائص بالقصور الذاتي لمجموعة من جانب واحد، مبتوري الأطراف transtibial بطريقتين: أ) بواسطة القياس المباشر باستخدام تقنيات التذبذب ومجلس التفاعل، وب) باستخدام معادلات التنبؤ القياسية خلقت لأطرافه سليمة. وكانت تقديرات الناتج الملكية بالقصور الذاتي للأطراف صناعية مختلفة إلى حد كبير عن النهجين. أدى هذا الاختلاف في خصائص بالقصور الذاتي في تقديرات مختلفة إلى حد كبير من حركية مشتركة أثناء المشي، مع وجود اختلافات كبيرة يجري لوحظ خلال سوينغ.
على الرغم من اختلافات كبيرة في حركية مشتركة وقعت خلال الموقف باستخدام اثنين من مختلف تقديرات المعلمة بالقصور الذاتي، وكانت هذه الفروق لياليمول عند النظر في الآثار الأحجام لهذه الخلافات والاختلافات بالمقارنة مع وحظ خلال سوينغ. في معظم الدراسات من حركة الإنسان، وهذه فروق ذات دلالة إحصائية خلال الموقف قد لا يكون لها تأثير على نتائج في الدراسة. قوات رد فعل الارض يكون لها تأثير كبير على مقادير أقل من لحظة الشاملة المفاصل أقصى خلال مرحلة موقف من المشي. 17-19 على الرغم من وجود فروق ذات دلالة إحصائية في معلمات بالقصور الذاتي لكلا النموذجين، وكانت هذه الفروق ليست كافية للتغلب على أهمية الأرض قوة الرد مساهمة لإنتاج حظة مشتركة خلال الموقف. ميلر 25 كما اقترح في وقت سابق ان خصائص بالقصور الذاتي من جانب الأطراف الاصطناعية لم يكن لها أثر يذكر على مقادير أقل من حركية مشتركة أقصى خلال المرحلة موقف التوالي. ومع ذلك، ميلر 25 استغرق فقط في الاعتبار الاختلافات في كتلة ووسط الموقع الشامل للطرف عند تغيير المواليةأطرافهم sthetic في خصائص بالقصور الذاتي لنموذج ديناميات العكسية. لم تسجل فروق في لحظة من الجمود في النموذج، ولكن أشير إلى أنه حتى لو تمت مضاعفة لحظة من الجمود أو النصف فإنه من المرجح أن يكون لها أثر يذكر على حجم حظة المشتركة. شكلت المدى Iα في معادلة الحركة لأقل من 3٪ من لحظة مشتركة الشاملة في أي لحظة معينة خلال المرحلة موقف التوالي. بالأرقام المطلقة، لوحظ أن أكبر تغيير في حجم حظة لدراستنا في لحظة مفصل الورك في ~ 11٪ من دورة مشية حيث كان متوسط زيادة حجم ~ 2 N · م. كان هذا تقريبا نصف حجم الزيادة التي تمت ملاحظتها بواسطة ميلر 25 خلال المرحلة موقف التوالي. نتائجنا جنبا إلى جنب مع تلك التي تشير إلى أن ميلر تدابير مباشرة لبدلة الجمود، بما في ذلك لحظة الجمود، ليس لها سوى تأثير ضئيل أو لا تذكر على مقادير حظة مشتركة في الورك والركبة خلال stancالمرحلة (ه) من المشي أو الجري.
فيما يتعلق مرحلة التحول من المشي، واختيار نموذج بالقصور الذاتي لا يكون لها تأثير كبير على مقادير أقل من حركية مشتركة أقصى. أثناء التأرجح، وليس هناك قوة خارجية كبيرة، مثل قوة رد فعل الارض خلال الموقف. حركة أطرافهم أكثر اعتمادا بكثير على الجمود في النظام والتفاعلات بين القطاعات. وقد انعكس ذلك من خلال التغيرات الكبيرة في مقادير الحركية مشتركة لوحظ عندما استخدمت اثنين من نماذج مختلفة بالقصور الذاتي في تحليل ديناميات العكسية. باستخدام معادلات الانحدار على أساس التشريح سليمة لنموذج أطرافهم الاصطناعية أثناء التأرجح، واقترح أن هناك حاجة إلى جهد عضلي أكبر مما كانت عليه عندما كانت تستخدم الخصائص المقاسة بالقصور الذاتي الفعلي للبدلة.
تقنية وصفها في هذه الورقة لقياس مباشرة خصائص بالقصور الذاتي من بدلة تحت الركبة لديها العديد من القيود. وصفناها طرق لأدلى الثانية القياسات الملكية الجمود في الساقين فقط ليحلل المستوى السهمي. وتشمل التحسينات على هذا النظام خلق بنية القفص الداخلية التي يمكن تعليقها من ثلاثة محاور مختلفة بحيث يمكن قياس كل اللحظات الرئيسية الثلاثة من الجمود. بالإضافة إلى ذلك، يمكن استخدام هذه التقنية لوحة رد فعل لجميع الطائرات الثلاث لقياس موقع ثلاثية الأبعاد من مركز بدلة الكتلة. أن التحسن أخرى التي يمكن أن تجعل تقديرات العضو المتبقي الشامل قليلا أكثر دقة يكون لاستخدام تقييم الحجمي كما وصفها Czerniecki وزملاؤه 24 حيث علق العضو المتبقي في اسطوانة من الماء لتقدير حجمه في حين أن كثافة الأنسجة هي موحدة تطبيق لتقدير كتلة أطرافهم و. بالإضافة إلى ذلك، بدلا من استخدام نسبة يفترض أن توزيع مجموع كتلة بدلة بين مأخذ الاصطناعية والقدم، يمكن المفككة كل بدلة في الكاحل بحيث أن كل عنصر يمكن أن يكون weigheد مستقل. قيود أخرى من أسلوبنا هو أنه لا يتطلب بعض الوقت الإضافي خلال جلسة تجريبية. بشكل عام، وذلك باستخدام تقنية لدينا لقياس مباشرة الجمود بدلة من المرجح أن إضافة 30 دقيقة إلى الساعة الكلي اللازم لدورة جمع البيانات.
لأن لدينا عينة صغيرة من تحت الركبة الاصطناعية مع تصاميم مماثلة (أي قفل ودبوس المعلقات واستجابة مرنة ديناميكية قدم الاصطناعية)، وضع توصيات محددة لتقدير خصائص بالقصور الذاتي من دون الركبة الاطراف الصناعية بنسب بسيطة اعتبارا من خصائص سليمة أطرافهم الجمود هو إشكالية . ومع ذلك، والجمع بين نتائجنا مع تقديرات بالقصور الذاتي للالاصطناعية تحت الركبة من دراسات أخرى 20،21،23 ومقارنة هذه النتائج إلى الجمود تقديرات لأطرافه سليمة، وبعض الاتجاهات متسقة تصبح واضحة. بالمقارنة مع أطرافه سليمة، كتلة من الجانب الاصطناعية باستمرار 30-40٪ أقل، موقع COM هو 25-35٪ جالخاسر لمفصل الركبة، وزارة الداخلية هو 50-60٪ أقل عن محور عرضية من خلال مفصل الركبة.
في الختام، سوف باستخدام معادلات الانحدار لساق سليمة وقدم لنموذج خصائص بالقصور الذاتي من بدلة تحت الركبة تؤثر على مقادير من التقديرات الحركية المشتركة خلال سوينغ، ولكن لن يكون لها سوى تأثير ضئيل أو أدنى على هذه المقادير خلال الموقف. وبالتالي، للتركيز فقط على الباحثين المرحلة موقف للتنقل باستخدام خصائص بالقصور الذاتي من طرف سليمة لنموذج الجانب التعويضية لن يغير من المرجح استنتاجات الدراسة. ومع ذلك، بالنسبة لأولئك المهتمين في حركية مرحلة التأرجح، وينبغي النظر في اتخاذ تدابير مباشرة لبدلة خصائص بالقصور الذاتي لتجنب تشويه ديناميات الحقيقية للأطراف الاصطناعية أرجوحة الساق.
التذييل ألف
موثوقية وصلاحية لحظة من الجمود ومركز التقديرات قداس
لتقييم موثوقية وصحةذ من القياسات التجريبية لدينا من بدلة لحظة من الجمود ووسط الموقع الشامل، أجريت تجربتين بسيطة. في التجربة الأولى، وقدرت لحظات من الجمود ووسط مواقع كتلة من أربعة أشياء تجريبيا في ثلاث محاكمات منفصلة. كانت الكائنات الأربعة: 1) 9 × 9 × 61 سم كتلة من الخشب المعالجة (الكتلة = 2.8 كجم)، 2) 9 × 9 × 64 سم كتلة من الخشب غير المعالجة (الكتلة = 2.5 كجم)، 3) 7 × 9 × 65 سم كتلة من الخشب غير المعالجة (الكتلة = 1.8 كجم)، و 4) قطعة 61 سم طويلة من الأنابيب البلاستيكية مع وداخل القطر 8 سم وقطرها خارج 9 سم (0.8 كجم = الشامل). تم استخدام تقنية التذبذب 12 لتقدير حظة كل كائن من الجمود حول محور عرضية من خلال كتلته المركز. عندما تتأرجح كائن حول محور ثابت، فترة التذبذب (τ) للكائن يتناسب حظة الكائن من الجمود حول هذا المحور الثابت. إذا كانت السعة التذبذب هو أقل من 5 ° النسبي لموقف محايد،لحظة القصور الذاتي للجسم ويمكن تقدير يستند إلى حركة البندول البسيط:
 (A.1)
(A.1)
حيث كنت أكسيس هي لحظة من الجمود النسبي لمحور التذبذب، m هو كتلة من النظام، ز هو تسارع الجاذبية، ود هي المسافة بين محور التذبذب ومركز الكتلة للنظام.
تم استخدام تقنية تفاعل المجلس لتقدير مركز كل كائن من موقع الشامل. وكان من المفترض توازن ثابت (لحظات Σ = 0) واللحظات التي تنتجها وزن الجسم، وقد لخص الوزن من الإطار، وقوة رد فعل حول محور المرجعية الثابتة. لحظة من الجمود ووسط موقع كتلة كل جسم وأيضا تقدر على أساس معادلات هندسية بسيطة. وتمت مقارنة لدينا تدابير تجريبية لهذه estimatio هندسيةنانوثانية لتقييم الصلاحية. تم تقييم موثوقية تقديراتنا للمركز موقع الشامل وعزم القصور الذاتي باستخدام اثنين (واحد لتقدير COM واحدة لتقدير وزارة الداخلية)، واحد عامل النموذج الخطي العام ANOVAs، مع 3 التدابير المتكررة التي تعكس التجارب الثلاث. تم حساب معاملات الارتباط Intraclass (ICCS) أيضا لتحديد التكرار من تقديراتنا.
في التجربة الثانية، قمنا بتقييم مدى موثوقية فترتنا من التذبذب (τ) القياس. وقد تم قياس τ لمدة 10 محاكمات متتالية فقط مع هيكل من الألومنيوم مع وقف التنفيذ من محور التذبذب و 10 محاكمات متتالية مع كتلة خشبية (الكتلة = 2.8 كجم، أبعاد = 9 × 9 × 61 سم) مضمونة في إطار من الألومنيوم وعلقت على حد سواء من محور التذبذب. خلال كل محاكمة، وقد تم قياس τ لمدة 10 التذبذبات متتالية باستخدام خلية ضوئية الذي يعتمد على شدة الضوء المنعكس الجهد تختلف الإخراج. كان موثوقية القياس لدينا τ لssessed باستخدام أربعة، عامل واحد النموذج الخطي العام ANOVAs، مع 10 تدابير المتكررة. واستخدمت اثنين (واحد لإطار المحاكمات فقط، واحدة للكتلة الإطار + تجارب) ANOVAs لتحديد ما إذا τ تختلف بين التذبذبات متتالية (أي كان مصفوفة بيانات الإعداد بحيث كان العامل فترات متتالية من التذبذب خلال المحاكمة معين). ثم تم استدارة مصفوفات البيانات بنسبة 90 درجة بحيث كان العامل محاكمات متتالية، وكانت تستخدم اثنين من أكثر ANOVAs لتحديد ما إذا اختلف τ عبر محاكمات متتالية. تم حساب معاملات الارتباط Intraclass (ICCS) أيضا لتحديد التكرار قياساتنا.
نتائج التجربة 1 – أربعة كائنات
وقد بالغت حظة كل كائن من الجمود حول محور عرضية من خلال مركز كتلته (I_obj_cm) باستمرار (بواسطة ~ 5٪ للكتل خشبية و~ 12٪ لأنابيب PVC) بالمقارنة مع التقديرات على أساس كل objectR17، ق الشامل والهندسة (عز) (الجدول 3). تقديرات لدينا، ومع ذلك، كانت موثوقة للغاية. لم يكن هناك فرق في لحظة من الجمود يعني (F = 2،6 0.154، P = 0.861) لأربعة كائنات عبر المحاكمات الثلاث. بالإضافة إلى ذلك، كشفت ICCS التي عبر التجارب كان لدينا لحظة من الجمود تقدير تكرار للغاية (ICC = 1.00). وبالتالي، على الرغم من تقديرنا تميل إلى المبالغة في تقدير حظة الكائن من الجمود مقارنة بالتقديرات هندسية كانت تقديراتنا موثوق بها.
كان لدينا مركز لتقدير موقع الشامل باستخدام تقنية تفاعل المجلس بما يتفق مع التقديرات على أساس افتراض كثافة موحدة ونموذجا هندسية. وكانت الخلافات أقل من 1٪. لم يكن هناك اختلاف في مركز متوسط الموقع الشامل (F = 2،6 1.126، P = 0.384) لأربعة كائنات عبر المحاكمات الثلاث. بالإضافة إلى ذلك، كشفت ICCS التي عبر التجارب كان مركزنا التقدير الشامل تكرار للغاية (ICC> 0.99). وبالتالي،كانت مركزنا لتقديرات الشامل صحيحة وموثوقة.

. الجدول 3 لدينا تقديرات تجريبية لحظات من الجمود ومركز من المواقع الشامل للكائنات الأربعة مقارنة مع تقديرات على أساس كتلة وهندسة كل كائن انقر هنا للحصول موسع للرأي من الجدول. تعريفات المتغير: mframe = كتلة الإطار الألومنيوم؛ mobject = كتلة الجسم؛ t_frame = الفترة من التذبذب الإطار فقط؛ وتم تحديد الفترة من التذبذب كما يعني من 10 التذبذبات متتالية وعبر ثلاث تجارب متتالية. t_object = الفترة من التذبذب من الإطار والاعتراض معا؛ تحديد نفس t_frame؛ I_Frame_osc = أنا من الإطار نسبة إلى محور التذبذب؛I_Frame_obj_osc = أنا من الإطار بالإضافة إلى كائن نسبة إلى محور التذبذب؛ I_obj_osc = أنا من كائن نسبة إلى محور التذبذب؛ I_obj_cm = أنا الكائن حول محور من خلال مركز الكائن الكتلة؛ عز = التنبؤ النظري من أنا حول CM الكائن باستخدام معادلات التنبؤ هندسية التالية:
PVC: ![]() ؛ حيث كان نصف قطرها R الخارجي، كانت ص نصف قطرها الداخلي، وكان طول ح
؛ حيث كان نصف قطرها R الخارجي، كانت ص نصف قطرها الداخلي، وكان طول ح
الخشب: ![]() ؛ حيث هو طول وب هو كان من المتوقع عرض موقع CM هندسية إلى 50٪ من طول الجسم.
؛ حيث هو طول وب هو كان من المتوقع عرض موقع CM هندسية إلى 50٪ من طول الجسم.
نتائج التجربة 2 – حقبة التذبذب (τ) تقييم
عندما علقت على هيكل من الألومنيوم وحده من محور التذبذب وتأرجح، τ باستمرار وبصورة منتظمة انخفضت (F = 9،81 123.25؛ ع <0.001) على مدى 10 oscil الأولىالنتهاكات بنحو 6 ميللي ثانية في جميع المحاكمات التذبذب 10 (الشكل 5؛ اللوحة اليسرى). عبر التجارب، تم العثور على فترة من التذبذب يعني أيضا أن هناك اختلاف كبير (F = 9،81 13.97؛ ع <0.001) عندما تأرجحت فقط الإطار. ومع ذلك، كشفت ICCS أنه في غضون محاكمة معينة كان الانخفاض المنتظم في τ خلال التذبذبات 10 أول تكرار (ICC = 0.99). عندما تتأرجح الإطار وكتلة خشبية (م = 2797 ز) معا، لم τ لا تتغير مع مرور التذبذبات 10 الأولى (F = 9،81 3.031، P = 0.116) وτ فإن متوسط في 10 محاكمات متتالية لا تختلف كثيرا ( F = 9،81 3.533، P = 0.093) (الشكل 5؛ اللوحة اليمنى). ICCS للإطار كائن زائد التجارب تشير إلى أنه في غضون τ المحاكمة نظرا ليست للتكرار من التذبذب إلى التذبذب (ICC = 0.17). وتشير هذه البيانات إلى أن للإطار ويقدر فقط محاكمات τ أفضل كوسيلة من التذبذب الأول في سلسلة من ثلاثي المرض وأنه عندما تأرجحت كائن مع خصائص مماثلة لتلك التي من بدلة تحت الركبة، ويقدر τ أفضل كما يعني التذبذبات عبر متتالية وعبر عدد من المحاكمات.
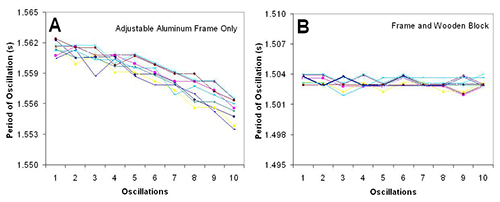
الرقم 5. الفترة من التذبذب قياس ل(A) هيكل من الألومنيوم فقط و (ب) الإطار وكتلة خشبية (كتلة كتلة = 2.8 كجم، أبعاد كتلة = 9 × 9 × 61 سم). يظهر كل لوحة 10 محاكمات منفصلة مع أول 10 عرض التذبذبات كل محاكمة. فقط مع الإطار علقت من محور التذبذب (اللوحة اليسرى)، وانخفضت τ منهجي خلال التذبذبات 10 الأولى. ومع ذلك، عندما تمت إضافة كتلة خشبية إلى الإطار، τ لم تختلف بشكل منهجي عبر التذبذبات 10 الأولى (اللوحة اليمنى).
حساسية لحظة من الجمود لفترة من التذبذب
ر "> لأن النتائج من التجربة 1 تشير المبالغة في تقدير تقديراتنا للحظة كائن من الجمود باستمرار والنتائج من تجربة 2 تشير إلى أن τ الإطار النقصان خلال التذبذبات 10 الأولى، أجرينا تحليل الحساسية لتحديد أفضل طريقة لقياس . τ عن الإطار فقط المحاكمات والإطار بالإضافة إلى التجارب كائن (جدول 4) τ يتناسب طرديا مع لحظة القصور الذاتي للجسم: (A.2)
(A.2)
حيث كنت أكسيس هي لحظة من الجمود النسبي لمحور التذبذب، m هو كتلة من النظام، ز هو تسارع الجاذبية، ود هي المسافة بين محور التذبذب ومركز الكتلة للنظام. لذلك، إذا يقلل τ، حتى ذلك الحين لا أنا محور لم، ز، د وثوابت في محاكمة معينة. وبما أننا استيتتزاوج لحظة القصور الذاتي للكائن على النحو التالي:
أنا الكائنات = أنا + الإطار الكائنات – إذا رامي (A.3)
والتقليل من شأن لحظة من الجمود من الإطار (الإطار الأول) إنتاج لحظة أكبر من التقدير الجمود لكائن (أنا الكائنات)، وهو ما يتسق مع تقديرات لدينا في التجربة 1. الشكل 6 يعرض τ من التجربة 1 لكل من الإطار فقط التجارب والإطار بالإضافة إلى التجارب كائن لكائن أخف وأثقل الكائن. ويوضح هذا الرقم أن للكائنات أثقل (مثل الركبة بدلة أدناه) عدم وجود انخفاض واضح في τ خلال التذبذبات 10 الأولى، ولكن للكائنات أخف وزنا وجود انخفاض طفيف في منهجية τ.

الجدول 4. مقارنةوكان أربعة أساليب مختلفة لتحديد فترة التذبذب. الكائن المستخدمة في هذا التحليل سم كتلة 9 × 9 × 61 من الخشب المعالجة. حالة C أنتجت أفضل تقدير للحظة الكائن من الجمود بالمقارنة مع تقدير النظرية البديلة على أساس الشامل للكائن والهندسة. اضغط هنا للحصول على موسع للرأي من الجدول. ملاحظات: تعريفات المتغير هي نفس الجدول 3 الحالة. حسبت t_frame وt_object كفترة متوسط التذبذب من 10 التذبذبات متتالية عبر 3 محاكمات الحالة B: A. حسبت t_frame وt_object مثل متوسط الفترة الأولى من التذبذب في 3 محاكمات منفصلة الحالة C: كما تم تحديد t_frame في حالة باء؛ تم تحديد t_object كما في حالة A. D حالة: تم تحديد t_frame كما هو الحال فيحالة A؛ تم تحديد t_object كما في حالة B.
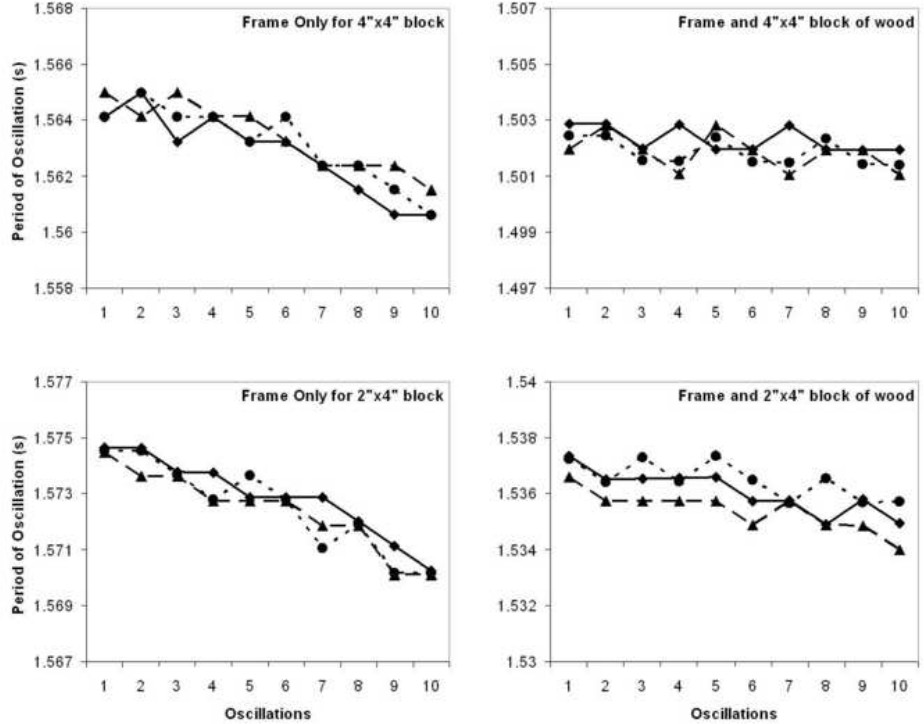
الرقم 6. فترات التذبذب للوالأخف وزنا أثقل الكائنات. عرض لوحات ترك فترات ال 10 الاولى من التذبذب في ثلاث محاكمات للإطار فقط، وعرض لوحات اليمين الشيء نفسه بالنسبة للإطار زائد المحاكمات الكائن. كما هو الحال في التجربة 2، وجود انخفاض في منهجية τ خلال التذبذبات 10 الأولى عندما تأرجحت فقط الإطار. عندما تأرجحت جسم ثقيل (م = 2.797 كجم)، لم يكن هناك انخفاض في منهجية τ. ومع ذلك، لوحظ وجود انخفاض طفيف في τ عندما تأرجحت الكائن ضوء (م = 0.716 كجم). وقد تم الإبلاغ عن نموذجي بدلة تحت الركبة الشامل لتتراوح 1،2-2،1 كجم 20،21. وبالتالي، حتى بالنسبة للأطراف اصطناعية أخف الوزن، ويجب أن لا τتظهر انخفاضا كبيرا خلال التذبذبات 10 الأولى.
استنتاج
عندما تأرجحت هيكل من الألومنيوم وحده، وسيتم تحديد فترة التذبذب كما يعني من التذبذب الأولى من التجارب 10 التذبذب. عندما تأرجحت هيكل من الألومنيوم وبدلة، وسيتم تحديد فترة التذبذب كما يعني من 30 التذبذبات (3 المحاكمات، 10 التذبذبات متتالية داخل كل محاكمة).
