De toenemende markt voor klein en draagbaar echografie (VS)-scanners leidt tot de ontwikkeling van nieuwe echographic sondes in welk deel van het signaal-airconditioning en beamforming elektronica is geïntegreerd in het handvat van de sonde, vooral voor 3D / 4D imaging 1. nieuwe technologieën bijzonder geschikt om dit hoge niveau van integratie omvatten Micromachined ultrasoon Transducers (MUTs)2, een klasse van Micro Electro-mechanische systeem (MEMS) omvormers vervaardigd op silicium. Capacitieve MUTs (CMUTs) hebben in het bijzonder eindelijk een technologische rijpheid, dat ze een geldig alternatief voor piëzo-elektrische omvormers voor volgende generatie echografie imaging systemen3 maakt. CMUTs zijn zeer aantrekkelijk vanwege hun compatibiliteit met technologieën voor micro-elektronica, brede bandbreedte – die resulteert in een hogere beeldresolutie – hoog thermisch rendement en, boven alles, hoge gevoeligheid4. In het kader van de ENIAC JU-project DeNeCoR (apparaten voor NeuroControl en NeuroRehabilitation)5, CMUT sondes worden ontwikkelde6 voor Amerikaanse hersenen beeldtoepassingen (bijvoorbeeld Neurochirurgie), waar hoge kwaliteit 2D/3D/4 D beelden en nauwkeurige weergave van de breinstructuur zijn vereist.
In het ontwikkelingsproces van nieuwe Amerikaanse sondes is de mogelijkheid van het uitvoeren van de vroege beoordeling van imaging prestaties van fundamenteel belang. Typische evaluatie technieken betrekken meten van bepaalde parameters zoals resolutie en contrast, gebaseerd op beelden van weefsel nabootsen phantoms met ingesloten doelen van de bekende meetkunde en echogenicity. Meer realistische analyse met toepassingsspecifieke imaging doelen kunnen bijzonder waardevol zijn voor een vroege evaluatie van de verwachte prestaties van Amerikaanse sondes in hun potentiële toepassing aan een specifieke klinische veld. Aan de andere kant, de volledige herhaalbaarheid van acquisities is van fundamenteel belang voor de vergelijkende tests van verschillende configuraties na verloop van tijd, en deze eis in vivo experimenten helemaal uitsluit.
Diverse werken in de literatuur over diagnostische beeldvormingstechnieken voorgesteld het gebruik van ex vivo dierlijke specimens7, cadaver hersenen8of weefsel nabootsen phantoms9 voor verschillende doeleinden10, waaronder de testen van beeldvormende methoden, registratie algoritmen, magnetische resonantie (MR) sequenties of het Amerikaanse beam-patroon en de daaruit voortvloeiende beeldkwaliteit. Bijvoorbeeld, in het kader van brain imaging, Lazebnik et al. 7 een formaline-vaste schapen hersenen gebruikt om te evalueren van een nieuwe 3D heer registratie methode; Evenzo Choe et al. 11 onderzocht een procedure voor de registratie van de heer en de lichte microscopie van beelden van een vaste uil aap hersenen. Een phantom hersenen van polyvinylalcohol (PVA) werd ontwikkeld in9 en gebruikt voor het uitvoeren van multimodale afbeelding overnames (dat wil zeggen heer, VS, en berekend tomografie) voor het genereren van een gedeelde afbeelding dataset12 voor het testen van registratie en Imaging algoritmen.
Over het geheel genomen, deze studies bevestigen dat het gebruik van een realistisch doel voor afbeelding acquisities inderdaad een essentiële stap tijdens de ontwikkeling van een nieuwe beeldvormende techniek is. Dit betekent een nog meer kritieke fase bij het ontwerpen van een nieuwe beeldapparaat, zoals de CMUT ons sonde gepresenteerd in dit document, dat is nog in een fase van prototyping en behoeften van de uitgebreide en reproduceerbare testen na verloop van tijd, voor een nauwkeurige afstemming van alle ontwerp parameters voor de definitieve realisatie en mogelijke validatie in in-vivo -toepassingen (zoals in13,14,15).
Het experimentele protocol beschreven in dit werk is dus ontworpen om een robuuste, toepassingsspecifieke imaging beoordelingsprocedure voorzien nieuw ontwikkelde VS sondes gebaseerd op CMUT technologie. Om ervoor te zorgen van zowel realisme en herhaalbaarheid, boviene werden hersenen (verkregen door middel van de voedselvoorziening commerciële standaardketting) vast in formaline gekozen als imaging doelen. De fixatie procedure garandeert langetermijnbewaring van weefsel kenmerken met behoud van bevredigende morfologische kwaliteiten en eigenschappen van de zichtbaarheid in zowel de V.S. als de heer imaging16,17.
Het protocol voor de beoordeling van de beeldkwaliteit vs beschreven hier ook implementeert een functie geleend van neuronavigation technieken die worden gebruikt voor neurochirurgie15. In een dergelijke aanpak, zijn Amerikaanse sondes verbonden met een motion tracking systeem waarmee ruimtelijke positie en oriëntatie gegevens in real-time. Op deze manier kunnen Amerikaanse beelden opgedaan tijdens chirurgische activiteiten automatisch worden geregistreerd en gevisualiseerd, voor begeleiding, in superpositie te pre-operatory heer beelden van de hersenen van de patiënt. Voor de toepassing van het voorgestelde protocol, de superpositie met MIJNHEER beelden (die worden beschouwd als de gouden standaard in de beeldvorming van de hersenen) is van grote waarde, omdat hierdoor menselijke deskundigen te visueel beoordelen die morfologische en weefsel functies zijn herkenbaar in de beelden van de VS en, vice versa, om te herkennen van de aanwezigheid van imaging artefacten.
De mogelijkheid om te vergelijken van de beelden verkregen met verschillende Amerikaanse sondes wordt nog interessanter. Het experimentele protocol gepresenteerd omvat de mogelijkheid om te definiëren van een reeks van ruimtelijke referentie vormt voor de acquisities in de VS, gericht op de meest feature-rijke volume regio’s geïdentificeerd in een voorlopige visuele inspectie van MIJNHEER beelden. Een geïntegreerde visuele tool, ontwikkeld voor de Paraview opensource software systeem18, biedt begeleiding aan exploitanten voor het afstemmen van deze vooraf gedefinieerde poses tijdens Amerikaanse afbeelding overname fasen. Voor de kalibratie procedures door het protocol opgelegde, is het fundamenteel voor alle exemplaren van de doel – biologische of synthetische – voorzien van vooraf gedefinieerde positie monumenten die ondubbelzinnig ruimtelijke referenties. Dergelijke monumenten moet zichtbaar in zowel de V.S. als de heer beelden en fysiek toegankelijk is voor de metingen met de motion tracking systeem. De elementen van de gekozen landmark voor het experiment zijn kleine bollen van Flint glas, waarvan zichtbaarheid in zowel de V.S. als de heer beelden werd aangetoond in de literatuur19 en bevestigd door voorlopige VS en MIJNHEER scans die vóór de voorgestelde experimenten uitgevoerd.
Het protocol gepresenteerd is gebaseerd op de echografie Advanced Open Platform (ULA-OP)20, een volledige en open onderzoek en ontwikkelsysteem voor ons Beeldacquisitie, die veel bredere experimentele mogelijkheden dan commercieel beschikbaar biedt scanners en dient als een gemeenschappelijke basis voor de evaluatie van verschillende Amerikaanse sondes.
Ten eerste, de instrumenten die worden gebruikt in dit werk worden beschreven, met name de nieuw ontworpen CMUT-sonde. Het experimentele protocol is intromingen in detail, met een uitgebreide omschrijving van alle betrokkenen, van eerste ontwerp tot systeem kalibratie, Beeldacquisitie en post-processing procedures. Ten slotte, de verkregen beelden worden gepresenteerd en de resultaten worden besproken, samen met tips voor toekomstige ontwikkelingen van dit werk.
Instrumentatie
CMUT sonde prototype
De experimenten werden uitgevoerd met behulp van een nieuw ontwikkelde 256-element CMUT lineaire matrix prototype, ontworpen, vervaardigd en verpakt in het laboratorium (ACULAB) van de Acoustoelectronics van Roma Tre-universiteit (Rome, Italië), met behulp van de productie-procédé Reverse CMUT ( RFP)4. RFP is een microfabrication en verpakkingstechnologie, speciaal bedacht voor de realisatie van MEMS omvormers voor ons beeldtoepassingen, waarbij de microstructuur van de CMUT wordt vervaardigd op silicium na een “upside-down” benadering21. In vergelijking tot andere technologieën voor de vervaardiging van CMUT levert RFP imaging prestatieverbetering als gevolg van de hoge uniformiteit van de CMUT cellen meetkunde over de volledige array en het gebruik van akoestisch gemanipuleerde materialen in de sonde hoofd pakket. Een belangrijk kenmerk van RFP is dat de elektrische interconnectie pads zijn gevestigd op het achterste deel van het CMUT sterven, die de 3D-integratie van 2D-arrays en front-end meerkanaals elektronica verlicht.
De 256-element CMUT matrix was ontworpen om te opereren in een frequentieband gecentreerd op 7.5 MHz. De toonhoogte van een element van 200 µm werd gekozen voor de array wat resulteert in een maximale breedte van het veld-of-view van 51,2 mm. De hoogte van de interne CMUT Arrayelementen werd gedefinieerd om passende prestatie op het gebied van laterale resolutie en penetratie vermogen. Een 5 mm hoogte voor de element van de matrix werd gekozen om het verkrijgen van een-3 dB bundel breedte van 0,1 mm en een diepte van-3 dB van focus van 1,8 mm van 7.5 MHz, bij de vaststelling van de hoogte-focus op een diepte van 18 mm met behulp van een akoestische lens. 195 µm-wide Arrayelementen werden verkregen door regelen en elektrisch aansluiten in parallelle 344 circulaire CMUT cellen, na een zeshoekig lay-out. De resulterende 5 µm element-tot-element afstand, d.w.z. de kerf, komt dus overeen met de membraan-naar-membraan scheiding. Een schematische weergave van de structuur van een CMUT matrix wordt vermeld in Figuur 1.
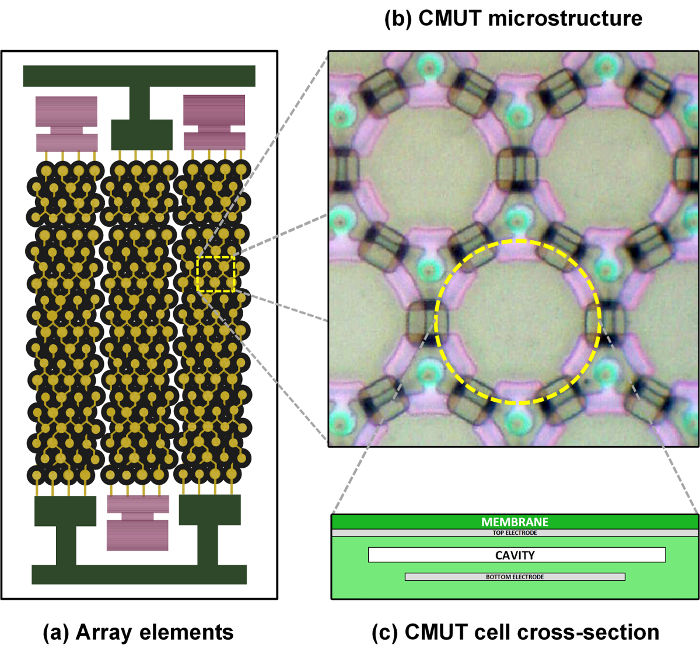
Figuur 1: CMUT matrix structuur. Schematische weergave van de structuur van een CMUT array: array elementen samengesteld uit verschillende cellen met elkaar verbonden parallelle (a), layout van de CMUT microstructuur (b); dwarsdoorsnede van een CMUT cel (c). Klik hier voor een grotere versie van dit cijfer.
De CMUT microfabrication parameters, d.w.z. de dwarskrachten en de verticale afmetingen van de plaat en de elektroden, waren gedefinieerd met behulp van eindige Element Modeling (FEM) simulaties met het oog op het bereiken van een breedband onderdompeling operatie, gekenmerkt door een de frequentierespons is gecentreerd op 7.5 MHz en een 100%-6 dB tweeweg fractionele bandbreedte. De hoogte van de spouw, d.w.z. de kloof, werd gedefinieerd om de spanning van een ineenstorting van 260 V te maximaliseren van de twee richtingen gevoeligheid, door de CMUT op 70% van de ineenstorting spanning4, overwegen een 80 V maximale excitatie signaal spanning vertekenende. Tabel 1 geeft een overzicht van de belangrijkste geometrische parameters van de microfabricated CMUT.
| CMUT matrix ontwerpparameters | |
| Met de parameter | Waarde |
| Matrix | |
| Aantal elementen | 256 |
| Element worp | 200 µm |
| Element lengte (hoogte) | 5 mm |
| Vaste hoogte focus | 15 mm |
| CMUT microstructuur | |
| De diameter van de cel | 50 µm |
| De diameter van de elektrode | 34 µm |
| Cel-naar-cel zijdelingse afstand | 7.5 µm |
| De dikte van de plaat | 2,5 µm |
| Hoogte van de kloof | 0,25 µm |
Tabel 1. CMUT sonde parameters. Geometrische parameters van de CMUT lineaire-matrix sonde en CMUT cel microstructuur.
Het verpakkingsproces gebruikt voor de integratie van de CMUT matrix in een sonde hoofd wordt in referentie4beschreven. De akoestische lens werd vervaardigd met behulp van een kamertemperatuur gevulkaniseerd (RTV) siliconen rubber doped met metal-oxide nanopowders overeenkomen met de akoestische impedantie van water en vermijden van valse reflecties op de interface22. De resulterende verbinding werd gekenmerkt door een dichtheid van 1280 kg/m3 en een snelheid van het geluid van 1100 m/s. Een straal van 7 mm kromming werd gekozen voor de cilindrische lens, wat leidt tot een geometrische focus van 18 mm en een maximale dikte van ongeveer 0,5 mm boven het oppervlak van de transducer. Een foto van de CMUT sonde hoofd is afgebeeld in Figuur 2(a).
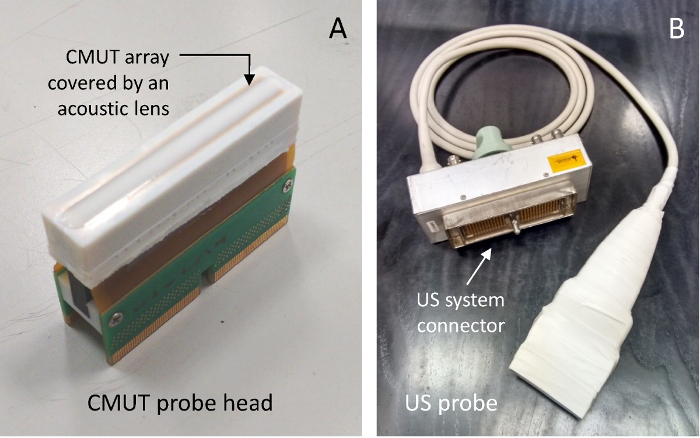
Figuur 2: CMUT sonde. Hoofd van de ontwikkelde CMUT sonde, met inbegrip van de lineaire matrix van transducers en akoestische lens (a), en de volledige CMUT sonde met connector (b). Klik hier voor een grotere versie van dit cijfer.
Het hoofd van de sonde CMUT werd gekoppeld aan de greep van de sonde met meerkanaals receptie analoge front-end elektronica en een multipolaire kabel voor de aansluiting op de VS-scanner. Het elektronische circuit van één kanaal is een hoge input-impedantie 9 dB-gain spanning versterker waarmee elektrische huidige nodig om te rijden de impedantie van de kabel. De multichannel elektronica, beschreven in referentie 4, is gebaseerd op een circuit-topologie met inbegrip van een ultra-laag-vermogen geluidsarme ontvanger en een geïntegreerde switch voor de duplexmodus signaal zenden/ontvangen. De front-end elektronica-voeding en de CMUT bias spanning zijn gegenereerd door een aangepaste voeding en gevoed aan de sonde via de multipolaire kabel. De volledige sonde is afgebeeld in Figuur 2(b).
Piëzo-elektrische VS sondes
Voor kwalitatieve vergelijking van de beelden verkregen met de CMUT-sondeboven, werden twee verkrijgbare piëzo-elektrische VS sondes opgenomen in de experimenten. De eerste is een lineaire-matrix sonde met 192 transducing elementen, een staplaats 245 µm en een 110% fractionele bandbreedte gecentreerd op 8 MHz. Deze sonde werd gebruikt voor het verwerven van 2D beelden van de B-modus. De tweede sonde is een sonde voor 3D-beeldbewerking met een mechanisch geveegd lineaire serie van 180 transducing elementen, met een worp van 245 µm en een 100% fractionele bandbreedte gecentreerd op 8,5 MHz. Een stappenmotor geplaatst binnen de sonde huisvesting kunnen vegen de lineaire matrix om meerdere vlakken, die kunnen worden gebruikt om te reconstrueren van een 3D-afbeelding van de gescande volume23verwerven.
ULA-OP systeem
De overname van Amerikaanse beelden was uitgevoerd door gebruik te maken van de ULA-OP systeem20, dat een volledige en open Amerikaanse onderzoek en ontwikkeling systeem is, ontworpen en gerealiseerd op de micro-elektronica Systems Design Laboratory van de Universiteit van Florence, Italië. De ULA-OP systeem kunt bepalen, zowel in de overdracht (TX) en ontvangst (RX), tot 64 onafhankelijke kanalen aangesloten via een matrix schakelaar op een Amerikaanse sonde met maximaal 192 piëzo-elektrische of CMUT omvormers. Het systeem het platform functies twee belangrijkste verwerking borden, een analoge bestuur (AB) en een digitale bestuur (DB), beide opgenomen in een rack, die worden aangevuld met een voeding bestuur en een rug-vliegtuig waarin de sonde connector en alle interne routering onderdelen. De AB bevat de front-end voor de sonde omvormers, in het bijzonder de elektronische onderdelen voor analoge conditionering van de 64 kanalen en de programmeerbare schakelaar-matrix die de TX-RX kanalen dynamisch wordt toegewezen aan de omvormers. Het DB is verantwoordelijk voor real-time beamforming, synthese van de TX-signalen en verwerken de RX is een echo om te produceren van de gewenste output (bijvoorbeeld B-modus afbeeldingen of Doppler sonograms). Het is gewezen dat het ULA-OP systeem is volledig configureerbaar, vandaar het signaal in TX kan elke willekeurige golfvorm binnen de bandbreedte van het systeem (bijvoorbeeld drie niveaus pulsen, sinus-uitbarstingen, sjirps, Huffman codes, enz.) met een maximum amplitude van 180 Vpp; Bovendien, de beamforming-strategie kan worden geprogrammeerd volgens de nieuwste focus patronen (bijvoorbeeld gericht Golf, multi-lijn-transmissie, vliegtuig Golf, uiteenlopende golven, beperkte diffractie balken, etc.)24,25 . Op hardwareniveau, zijn deze taken verdeeld over vijf veld Programmable Gate Arrays (FPGA) en een digitale signaalprocessor (DSP). Met mechanisch geveegd 3D imaging sondes, zoals hierboven beschreven, controleert de ULA-OP-systeem ook de stappenmotor binnen de sonde, voor de gesynchroniseerde verwerving van afzonderlijke 2D frames op elke positie van de matrix transducer.
De ULA-OP systeem kan worden opnieuw geconfigureerd tijdens runtime en aangepast aan verschillende Amerikaanse sondes. Het communiceert via een USB 2.0-kanaal met een host-computer, uitgerust met een specifieke softwaretool. De laatste heeft een configureerbare grafische interface die visualisatie in real time van Amerikaanse beelden, gereconstrueerd in verschillende modi; met volumetrische sondes, bijvoorbeeld, twee B-modus beelden van loodrecht vlakken in het gescande volume kunnen worden getoond in real time.
Het belangrijkste voordeel van het systeem van de ULA-OP voor de toepassing van het protocol beschreven is dat hierdoor een gemakkelijke afstelling van de TX-RX-parameters en het biedt volledige toegang tot de signaal gegevens verzameld bij elke stap in de verwerking keten26, ook maakt het mogelijk voor het testen van nieuwe beeldvormende modaliteiten en beamforming technieken27,28,29,30,31,32,33.
Motion trackingsysteem
Sonde naar record de VS positie tijdens Beeldacquisitie, een optische resolutie tracking systeem was werknemer34. Het systeem is gebaseerd op een sensor-unit dat uitzendt infraroodlicht via twee miniaturisten (light emitting diodes (LED’s)) en maakt gebruik van twee ontvangers (dat wil zeggen een lens en een charge – coupled device (CCD)) te detecteren het licht weerspiegeld door meerdere doel-specifieke passief markeringen in vooraf gedefinieerde rigide shapes gerangschikt. Informatie over gereflecteerde licht wordt vervolgens verwerkt door een aan boord CPU om te berekenen zowel plaats en richting van gegevens, die kan worden overgedragen aan een host-computer aangesloten via USB 2.0. De zelfde verbinding kan worden gebruikt om te controleren van de configuratie van de sensor unit.
De sensor unit wordt geleverd samen met een set hulpprogramma’s, elk uitgerust met vier reflecterende markeringen in een rigide geometrische configuratie gerangschikt. De motion tracking systeem kunt bijhouden maximaal zes afzonderlijke starre instrumenten tegelijk, met een frequentie van de werken van ongeveer 20 Hz. Twee dergelijke instrumenten werden gebruikt voor deze experimenten: een aanwijzer, waarmee de 3D positie verwerven geraakt door haar tip, en een klem toegeruste tool, die kan worden aangesloten op de Amerikaanse sonde onder test (Zie Figuur 14).
Aan de software kant beschikt de motie tracker een low-level seriële application programming interface (API) voor beide eenheid controle en gegevens verwerving, die toegankelijk zijn via USB. Standaard worden standpunt en de richtsnoeren voor de geretourneerd als multi-entry items, dat wil zeggen een inzending per elk gereedschap worden bijgehouden. Elk item bevat een 3D positie (x, y, z) uitgedrukt in mm en een oriëntatie (q,0, q,x, qy, q-z) uitgedrukt als een quaternion. Het systeem is ook voorzien van een werkset van hogere software-instrumenten, waaronder een grafische tracking tool voor het visualiseren en meten in realtime de posities/richtsnoeren voor meerdere tools binnen het gezichtsveld van de sensor unit.
Overzicht, integratie, software en systeemcomponenten
Het diagram in Figuur 3 wordt een overzicht gegeven van de instrumentatie voor het protocol, ook met een beschrijving van de gegevensstroom die in de systemen doorloopt vastgesteld.
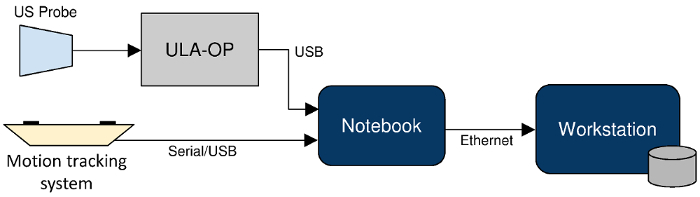
Figuur 3: blokschema van de hele hardware setup en systeem integratie. De Amerikaanse sonde is verbonden met het ULA-OP systeem dat via USB met de laptop voor Amerikaanse Beeldacquisitie communiceert. Op hetzelfde moment, is de laptop ook aangesloten via USB naar de ontwerpresolutie tracking systeem, voor positie data-acquisitie, en via Ethernet naar het werkstation, voor gegevensverwerking Klik hier voor een grotere versie van dit cijfer.
Naast de sondes van de Verenigde Staten, de beweging tracker en de ULA-OP systeem, die hierboven zijn beschreven, omvat de instelling ook twee computers, namelijk een notebook en een werkstation. Eerstgenoemde is de belangrijkste front-end voor instrumentatie, ontvangen en synchroniseren van de twee belangrijkste inkomende datastromen: de Amerikaanse beelden vanuit de ULA-OP systeem- en de 3D-positionering van de gegevens van de motie-tracker. Het biedt ook een visuele feedback aan de exploitant voor de beelden worden verworven. Het werkstation is aanzienlijk hoger computationele voldoende kracht en opslagcapaciteit. Het biedt back-end ondersteuning voor post beeldverwerking en een opslagplaats voor de gecombineerde imaging datasets. Het werkstation wordt ook gebruiktvoor de visualisatie van de VS en MIJNHEER beelden, met inbegrip van de mogelijkheid van gelijktijdige 3D visualisatie van geregistreerde multimodale beelden.
Een essentiële vereiste voor de afbeelding overname experimenten is de synchronisatie van de twee belangrijkste gegevensstromen. Het volgen van beweging en ULA-OP systemen zijn onafhankelijke instrumenten die nog niet een expliciete synchronisatie van activiteiten ondersteunen. Vanwege dit, Amerikaanse beeldinformatie gegevens en positie moet goed worden gecombineerd om te ontdekken de juiste 3D positie van de Amerikaanse sonde op het moment dat elke afbeeldingssegment werd overgenomen. Voor dit doel, is een specifieke logboektoepassing ontwikkeld voor opname en timestamping in real-time de gegevens verstrekt door de motion tracking systeem, door aanpassing van een C++-softwareonderdeel dat wordt geleverd, in dit geval in de motie-tracker zelf. Typisch, motion tracking-systemen zijn voorzien van een low-level API waarmee vastleggen van gegevens in real-time en transcriberen hen naar een bestand.
De geadopteerde synchronisatiemethode werkt als volgt. Elke vermelding in het bestand die is geproduceerd door de logboektoepassing wordt aangevuld met een tijdstempel in het formaat “JJJJ-MM-ddThh:mm:ss.kkk”, waar: y = jaar, M = maand, d = dag, h = uur, m = minuut, s = tweede, k = milliseconde. De ULA-OP PC gebaseerde software (C++ en MATLAB programmeertalen) berekent de begin- en eindtijd voor elke verwerving Afbeeldingsvolgorde en slaat deze gegevens in elk beeld in .vtk formaat. Om een gemeenschappelijke tijdelijke verwijzing tijdens de experimenten, worden beide bovenstaande software procedures uitgevoerd op de front-end computer in Figuur 3. Tijdstempels geproduceerd op deze manier worden vervolgens door de post-processing software procedures die de definitieve dataset produceren gebruikt (Zie Protocol, sectie 8).
Een ander onderdeel van de specifieke software werd gerealiseerd en uitgevoerd op het werkstation real-time om feedback te geven aan de exploitant, door de huidige Amerikaanse sonde positie aan MIJNHEER beelden en, in het bijzonder aan de set van vooraf gedefinieerde poses. Een server-side software routine in Python verwerkt de motie tracker-logboekbestand, vertaalt de huidige Amerikaanse sonde positie in een geometrische vorm, en stuurt de gegevens naar een server Paraview. Een Paraview client verbindt naar dezelfde Paraview server en in real time toont de positie van de geometrische vorm, gesuperponeerd op de afbeelding van een heer en verdere geometrische vormen met een beschrijving van de vooraf gedefinieerde poses. Een voorbeeld van het resulterende visualisatie in real time wordt weergegeven in Figuur 17.
