La percepción táctil es una forma fundamental de las sensaciones procesadas por el sistema somatosensorial, incluyendo la percepción háptica y la percepción táctil. La percepción táctil pasiva, a diferencia de la exploración activa, significa que el objeto se mueve para hacer contacto con la piel estática1,2. Como en otros sentidos, la resolución espacial en la percepción táctil, también denominado agudeza espacial táctil, suele representarse por el umbral táctil, el umbral de detección o el umbral de discriminación2,3. En los últimos 100 años, el umbral de dos puntos se ha utilizado comúnmente como una medida de agudeza espacial táctil4. Sin embargo, muchos estudios han indicado que el umbral de dos puntos es un índice inválido de capacidad espacial táctil porque la discriminación de dos puntos (TPD) no puede excluir las señales no espaciales (por ejemplo, si dos puntos están demasiado cerca, pueden localizar un único campo receptivo aferente, que evoca fácilmente un aumento de la actividad neuronal) y mantener un criterio estable para las respuestas3,4,5. Debido al número de inconvenientes de TPD, se han desarrollado varios métodos nuevos y prometedores como reemplazos, tales como orientación de rejilla táctil (GO)3,6,discriminación de orientación de dos puntos5,reconocimiento de cartas elevadas, detección de brechas7,patrones de puntos, anillos Landolt C8,y discriminación de ángulo (AD)9,10. En la actualidad, debido a las ventajas en el funcionamiento de GO, así como la estructura espacial y complejidad del estímulo utilizado, GO se utiliza cada vez más para medir la agudeza espacial táctil11,12,13.
Aunque se cree que go táctil se basa en mecanismos espaciales subyacentes, lo que produce una medida fiable de la agudeza espacial táctil, todavía se debate si el rendimiento de GO se ve afectado en parte por señales no espaciales14 (por ejemplo, signos intensivos que pueden proporcionar una señal para identificar la diferencia entre los estímulos de orientación). Además, GO sólo consiste en tareas simples de orientación espacial (es decir, horizontales y verticales) e implica principalmente el procesamiento sensorial, lo que limita su uso al explorar la interacción jerárquica entre el procesamiento primario táctil en la corteza somatosensorial primaria y la posesión táctil avanzada que implica la corteza parietal posterior (PPC) y el giro supramarginal (SMG)15,16,17. Para compensar estos inconvenientes, se desarrolló AD táctil para medir la agudeza espacial táctil9,10. En AD, un par de ángulos se deslizan pasivamente a través de la yema de los dedos. Los ángulos varían en tamaño, y el sujeto necesita determinar cuál de los ángulos es mayor. Para llevar a cabo constantemente esta tarea, las entidades espaciales de ángulos táctiles deben representarse y almacenarse en la memoria de trabajo y, a continuación, compararse y discernirse. Por lo tanto, la AD táctil implica no sólo el procesamiento primario, sino también la cognición avanzada de la percepción táctil, como la memoria de trabajo y la atención.
Al igual que en una variedad de pruebas de percepción de orientación de línea, en AD táctil el sujeto se presenta sucesivamente con un ángulo de referencia y un ángulo de comparación y se le pide que indique cuál es el ángulo más grande18,19,20,21. Las líneas que componen los ángulos son iguales en longitud y se distribuyen simétricamente a lo largo de un bisector imaginario. Al cambiar simétricamente las dimensiones espaciales de las líneas, se pueden crear todos los tipos de ángulos de plano elevados. Por lo tanto, una ventaja crítica de este método es que los ángulos que se diferencian tienen estructuras espaciales similares. Además, la representación espacial obtenida en el AD es más secuencial que la obtenida en GO. Sin embargo, el umbral ad proporciona evidencia de que la agudeza espacial táctil es suficiente para permitir la discriminación espacial entre objetos22. Además, la percepción espacial táctil del ángulo puede experimentarse de un punto a otro y finalmente formar un ángulo plano bidimensional en el que las señales no espaciales pueden desempeñar sólo un pequeño papel.
El umbral ad se encontró para aumentar con el aumento de la edad, que podría resultar de la necesidad de alta carga cognitiva en la tarea táctil AD. Por lo tanto, puede proporcionar un mecanismo de monitorización en el diagnóstico de deterioro cognitivo9,10. Aunque el rendimiento de ad se ve afectado por la disminución relacionada con la edad, puede mejorarse significativamente en los jóvenes mediante formación continua o formación de tareas táctiles similares23. Además, los estudios fMRI mostraron que una tarea de ángulo táctil de coincidencia a muestra retrasada activaba ciertas regiones corticales responsables de la memoria de trabajo, como la corteza parietal posterior17,24. Estos hallazgos sugieren que la discriminación de ángulo táctil es una medida prometedora para la agudeza espacial táctil que implica cognición avanzada. Aquí, el equipo táctil AD y su uso se describe en detalle. Otros investigadores táctiles pueden reproducir el equipo ad y usarlo en su investigación.
El equipo táctil AD, o estimulador táctil semiautomático de ángulo pasivo-dedo (TSPAS), utiliza una diapositiva electrónica para transportar un par de estímulos angulares para deslizarse pasivamente a través de la piel (Figura 1). Los brazos de los sujetos yacen cómodamente, postrados en una mesa. La mano derecha se sienta sobre una placa de mano en la mesa, y un dedo índice se encuentra ligeramente por debajo de la abertura de la placa. El software del ordenador puede controlar la diapositiva, moverla a una velocidad fija y moverla hacia adelante y hacia atrás. A medida que la diapositiva avanza, los estímulos angulares se deslizan pasivamente a través de la piel a una velocidad fija a partir de la punta del dedo. Cuando la diapositiva se mueve hacia atrás a su posición inicial y cambia a otro par de estímulos de ángulo, el sujeto necesita levantar el dedo índice hacia arriba y esperar a que una orden lo coloque ligeramente de nuevo en la abertura. Por lo tanto, el equipo presenta estímulos táctiles de ángulo a una velocidad controlada, duración de contacto estable e intervalo interestimulus constante. El sujeto informa oralmente de un número de secuencia, y el experimentador lo registra como respuesta y procede a llevar a cabo el siguiente ensayo.
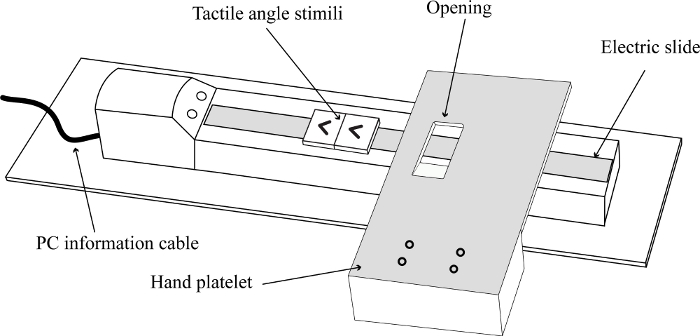
Figura 1: Visión general del TSPAS.
El equipo consta de cuatro partes: 1) estímulos táctiles de ángulo (es decir, el ángulo de referencia y diez ángulos de comparación); 2) la placa de mano que fija la mano del sujeto en su lugar y mantiene sólo el dedo índice en contacto con los estímulos; 3) el deslizador electrónico que lleva los estímulos táctiles; y 4) el sistema de control de ordenador personal (PC) que controla la velocidad y la distancia de movimiento de la diapositiva electrónica. Haga clic aquí para ver una versión más grande de esta figura.
