تشير البيانات الوبائية إلى أن هناك ~ 17 مليون حالة جديدة من السكتة الدماغية في جميع أنحاء العالم كل عام ، مع زيادة في الإصابة في البلدان المنخفضة والمتوسطة الدخل1. وتشير التقديرات إلى أن عدد الحالات الجديدة سيرتفع إلى 77 مليون بحلول عام 20302. غالبا ما يؤثر الضعف الحركي الناتج عن السكتة الدماغية على حركة المريض ومشاركته في أنشطة الحياة اليومية ، مما يساهم في انخفاض نوعية الحياة. تشمل إعادة التأهيل الحركي التقليدي العلاج اليدوي ، ولكن على مدى العقود القليلة الماضية ، تم تطوير أنظمة روبوتية لإعادة التأهيل. يمكن لهذه الأنظمة تقديم العلاج بكثافة عالية ، وجرعة ، وقابلية للقياس الكمي ، وموثوقية ، وتكرار ، ومرونة3 وقد أظهرت إمكانات كعلاجات إعادة تأهيل فعالة لكل من مرضى السكتة الدماغية الحادة والمزمنة4،5،6. بالإضافة إلى تقديم العلاج ، يمكن استخدام الأنظمة الروبوتية لإعادة التأهيل كأدوات تقييم حيث يمكن تجهيزها بأجهزة استشعار يمكنها قياس البيانات الحركية / الحركية لحركة المريض 7,8. بالنسبة لإعادة التأهيل الحركي للطرف العلوي ، لم تثبت هذه البيانات أنها مفيدة فقط لتقييم مستوى التعافي الحركي للمريض الذي أثاره العلاج الروبوتي وكانت بمثابة أداة تكميلية للتقييمات السريرية التقليدية 9,10 ، ولكنها ساهمت أيضا في تعزيز فهم عملية التعافي الحركي من السكتة الدماغية11 ، 12 وكذلك التحكم العصبي في الحركة والتعلم الحركي في المواد الصحية3،13،14. ونتيجة لذلك، وفرت هذه النتائج أساسا لتعزيز علاجات إعادةالتأهيل15.
على مدى العقدين الماضيين ، تم اقتراح العديد من الأجهزة الروبوتية لإعادة التأهيل العصبي للأطراف السفلية ، والتي تمتد من الهياكل الخارجية التي تدعم وزن جسم المريض أثناء المشي (على سبيل المثال ، فوق جهاز المشي ، مثل Lokomat16) إلى الأنظمة الروبوتية الثابتة التي تسمح للمريض بممارسة الكاحل أو الركبة أو القدم دون المشي (مثل Rutgers Ankle17 ، روبوت إعادة تأهيل الكاحل عالي الأداء18 ، وروبوت إعادة تأهيل الكاحل / القدم التابع لمعهد غوانغجو للعلوم والتكنولوجيا (GIST)19) أو أجهزة تقويم القدم النشطة التي يتم تشغيلها على الهياكل الخارجية التي يرتديها المريض للمشي فوق الأرض أو فوق جهاز المشي (مثل Powered Gait Orthosis20 و MIT Anklebot21). انظر22،23،4 للحصول على مراجعة حول الروبوتات لإعادة تأهيل الأطراف السفلية.
كانت نتائج الدراسات السريرية للأجهزة الروبوتية لإعادة تأهيل الأطراف السفلية على مرضى السكتة الدماغية مشجعة وأظهرت أن هذه الأنظمة قد تحسن نطاق حركة المفاصل (ROM) أو قوة العضلات أو المشي ، اعتمادا على الجهاز المحدد والبروتوكول السريري (انظر 24،25 لمراجعة فعالية روبوتات الأطراف السفلية لإعادة التأهيل). في حين تم افتراض أن العلاج بمساعدة الروبوت يعزز التغيرات العصبية ، والتي تؤدي في النهاية إلى تحسين القدرات الحركية26 ، كيف تحدث عملية التعافي الحركي من السكتة الدماغية بالضبط وأي بروتوكولات التدريب الروبوتية تعمل على تحسين عملية استعادة القدرات الحركية للأطراف السفلية ، لا تزال غير واضحة في الغالب. في الواقع ، هناك تفاوت كبير ومتزايد بين التطور المتزايد لروبوتات إعادة التأهيل (إما من قبل الباحثين الأكاديميين أو الكيانات التجارية) والفهم المحدود للآليات الفسيولوجية العصبية التي تكمن وراء التعافي الحركي4. ساهمت قياسات حركية الحركة أو عزم دوران المفاصل المأخوذة باستخدام أجهزة استشعار مدمجة في الوصف الكمي للتغيرات السلوكية الحركية التي تحدث عندما يستعيد المرضى القدرات الحركية للأطراف السفلية27،28،29 ، مما يسد هذه الفجوة جزئيا. ومع ذلك ، فإن الارتباطات العصبية الكامنة وراء هذه التغييرات كانت أقل تحقيقا. هذا يرجع إلى عدة أسباب.
يستغرق التصوير الوظيفي للدماغ وقتا طويلا ويصعب إكماله في بعض الأحيان في سياق التجارب السريرية ، والتي تتطلب غالبا إبقاء عبء المريض في حده الأدنى لزيادة احتمالية التزام المريض بالدراسة. هذا ينطبق بشكل خاص على الأفراد الذين عانوا من سكتة دماغية ، بالنظر إلى حقيقة أن التعب بعد السكتة الدماغية وضعف العضلات كثيرا ما يلاحظ30. أيضا ، تتطلب طرق التصوير التي تعتمد على المجالات المغناطيسية ، مثل التصوير بالرنين المغناطيسي الوظيفي (fMRI) ، أن تكون كل من أجهزة المريض والروبوتية آمنة للمغناطيس.
من بين طرق التصوير غير الغازية ، يعد التحليل الطيفي الوظيفي للأشعة تحت الحمراء القريبة (fNIRS) تقنية تصوير مناسبة بشكل خاص لتقييم مناطق تنشيط الدماغ في الأشخاص الذين يخضعون للعلاج الروبوتي. على غرار التصوير بالرنين المغناطيسي الوظيفي ، يقيس fNIRS أكسجة الدم / إزالة الأكسجين في الدماغ. ومع ذلك ، على عكس التصوير بالرنين المغناطيسي الوظيفي ، فإن fNIRS متوافق تماما مع الأجهزة الروبوتية ، وغالبا ما يكون محمولا ، حتى أنه يمكن استخدامه بجانب السرير. أيضا ، fNIRS لديه تكلفة منخفضة وحساسية أقل للقطع الأثرية المتحركة31،32،33.
على الرغم من مزاياه الواضحة واستخدامه على نطاق واسع في العديد من الإعدادات السريرية منذ تقديمه لأول مرة في أواخر 70s34 ، إلا أن عددا قليلا من الدراسات استخدم fNIRS لتحديد تنشيط الدماغ المرتبط بحركات الأطراف السفلية واستعادة حركة السكتة الدماغية. دراسات FNIRS التي تهدف إلى توضيح آليات التحكم العصبي في الحركة و / أو الآليات أو تقييم التعافي الحركي من السكتة الدماغية قد بحثت في الغالب في حركات المفصل الواحد (على سبيل المثال ، الانثناء الظهري أو الانثناء الأخمصي أو حركات تمديد الركبة35،36،37) ، المشي38،39،40،41،42،43 ، أو ركوب الدراجات44. انظر45 للمراجعة. وبالمثل ، ركزت دراسات fNIRS حول العلاج بمساعدة الروبوت للطرف السفلي في الغالب على إعادة تأهيل المشي بمساعدة الروبوت. انظر46 للمراجعة. ركزت بعض الدراسات على استخدام fNIRS كجزء من نظام واجهة الدماغ الحاسوبية (BCI) لاشتقاق إشارات التحكم للأجهزة الروبوتية47,48 ؛ بينما يعتمد هذا المجال البحثي أيضا على معالجة إشارات fNIRS ، فإن هدفه مختلف ويركز بشكل أساسي على فك تشفير نوايا المريض (على سبيل المثال ، المرضى الذين يعانون من إعاقات حركية شديدة).
الدراسة التجريبية المقدمة هنا هي جزء من جهد أولي للتحقيق في آثار نظام روبوتي لإعادة تأهيل الأطراف السفلية. يمكن للروبوت تقديم إعادة تأهيل الأطراف السفلية الموجهة نحو الهدف والتي تتضمن التدريب على الحركات اليومية متعددة المفاصل بالإضافة إلى تقديم العلاج للمفاصل المفردة (على سبيل المثال ، الركبة أو الكاحل) من الطرف السفلي (أي تنفيذ برنامج إعادة التأهيل من أسفل إلى أعلى).
هدفت الدراسة إلى التحقيق في جدوى بروتوكول تجريبي يتطلب الحصول على بيانات fNIRS أثناء أداء الطرف السفلي ، حركات التأشير متعددة المفاصل. مدة فترة الحصول على البيانات في هذه الدراسة ، والتي اقتصرت على 6 دقائق ، أقصر من بروتوكولات fNIRS النموذجية. كان هذا اختيارا متعمدا تم اتخاذه بهدف تعزيز التطبيق العملي والتطبيق السريري لهذا البحث ، لا سيما في المرضى الذين يعانون من محدودية الحركة أو القوة. كان تحديد ارتباطات fNIRS لمثل هذه الحركات المعقدة متعددة المفاصل واكتساب نظرة ثاقبة حول كيفية تعديل تنشيط الدماغ بمساعدة الروبوت من النقاط المثيرة للاهتمام أيضا. لهذا الغرض ، أجريت جلستان من التجارب مع نفس المشاركين: واحدة بدون مساعدة الروبوت والأخرى بمساعدة الروبوت. أخيرا ، من المهم ملاحظة أن هذه الدراسة ركزت على الموضوعات الصحية من أجل إنشاء أساس للبحث المستقبلي من حيث تسجيل جدوى البروتوكول وتقييم تنشيط الدماغ أثناء الحركات التي يستهدفها العلاج الروبوتي.
جهاز
تم استخدام روبوت محمول مصمم لتقديم إعادة تأهيل الأطراف السفلية (انظر الشكل 1) لإجراء تجاربنا. يحتوي الروبوت على مساحة عمل ثلاثية الأبعاد يمكن الوصول إليها وهو مضغوط وخفيف الوزن ، ويزن حوالي 35 رطلا ، مما يجعله سهل النقل والتركيب.
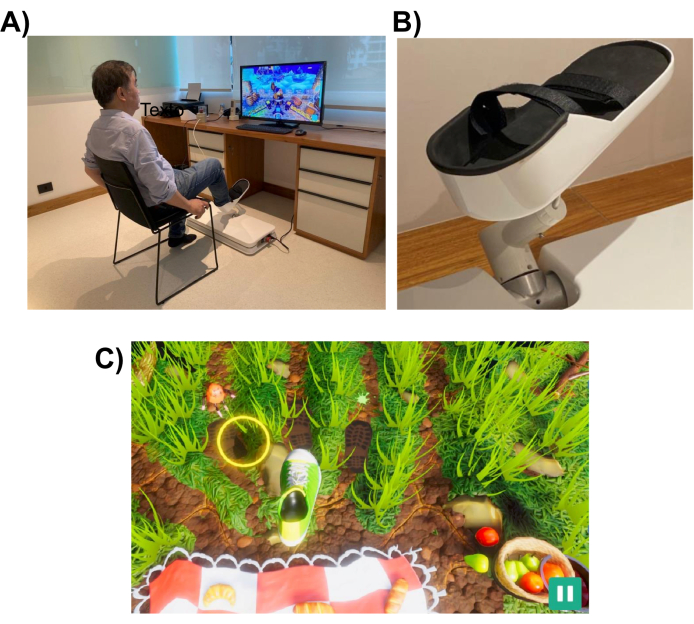
الشكل 1: الإعداد التجريبي. أ: النظام الروبوتي (المثبت على الأرض) المصمم للطرف السفلي. يظهر متطوع يستخدم الواجهة بقدمه اليمنى. (ب) هيكل دعم لقدم الشخص يتيح التعلق بالنظام الروبوتي. (ج) لقطة شاشة للعبة النزهة. الهدف من اللعبة هو تحريك القدم (الحذاء الأخضر والأبيض) إلى الهدف (الدائرة الصفراء). يرجى النقر هنا لعرض نسخة أكبر من هذا الرقم.
تم تصميم النظام الروبوتي لمساعدة المريض في أداء حركات الأطراف السفلية المشابهة لتلك التي يتم إجراؤها في المهام اليومية ، مثل الإشارة أو الركل. يستخدم ألعاب الواقع الافتراضي التفاعلية ، والتي يتم عرضها على شاشة الكمبيوتر أو شاشة التلفزيون الموضوعة أمام الجهاز الآلي (انظر الشكل 1). يتم توصيل المستجيب ذو الطرف النهي الآلي بالطرف السفلي للمريض (على سبيل المثال ، الكاحل) ، ويتم تعيين موضعه إلى موضع المؤشر على الشاشة. تظهر اللعبة النموذجية أهداف حركة المريض (على سبيل المثال ، الكائن الذي يجب الإشارة إليه أو مكان ركل الكرة).
لإكمال مهمة الحركة ، قد يساعد الروبوت المريض بمستوى من المساعدة يمكن أن يتراوح من المساعدة الكاملة إلى لا شيء. يتم اختيار مستوى المساعدة الروبوتية في بداية كل جلسة إعادة تأهيل بناء على مستوى ضعف الحركة لدى المريض. يتم استخدام الحركات التي يؤديها الموضوع بواسطة اللعبة لتسجيل أداء المريض وتزويده بتعليقات حول أدائه (على سبيل المثال ، ROM وعدد الحركات ومستوى المساعدة الروبوتية). تم تصميم الألعاب لتكون تفاعلية ومسلية للحفاظ على اهتمام المريض واهتمامه. في هذه الدراسة ، لعب المشاركون “لعبة النزهة” ، حيث كان على اللاعب منع الحشرات من الوصول إلى المنشفة وسرقة الطعام (انظر الشكل 1 ، اللوحة السفلية ، للحصول على لقطة شاشة).
تم إجراء الحصول على البيانات باستخدام نظام الحصول على fNIRS المحمول مع اثنين من البصريات الموجة المستمرة المختلفة (760 نانومتر و 850 نانومتر) ، و 8 مصادر LED مزدوجة الطرف ، و 8 كاشفات نشطة مزدوجة الطرف. تم الحصول على الإشارات باستخدام معدل أخذ عينات قدره 10.17 هرتز. تم استخدام كمبيوتر محمول لتحسين المعايرة وتسجيل الإشارات باستخدام شبكة Wi-Fi التي أنشأها نظام fNIRS.
تم استخدام غطاء لتثبيت البصريات في المواقع المحددة مسبقا. تم وضع المصادر وأجهزة الكشف وفقا لنظام EEG الدولي 10-10 في توزيع مكاني للشبكة. تم تحديد كل قناة fNIRS بواسطة زوج من كاشف المصدر بمسافات بين البصريات تبلغ حوالي 30 مم. وضعت البصريات فوق مناطق المحرك التكميلي، والمحرك الأولي، والمناطق الحركية في المواقع الموضحة في الشكل 2. بلغ العدد الإجمالي للقنوات 28 قناة ، حيث كانت 8 قنوات قصيرة المدى مقترنة بكل مصدر باستخدام محول ألياف بصرية إلى كاشف واحد. نظرا لإعداد تعدد الإرسال للأجهزة ، من الممكن الحصول على معلومات قصيرة المسافة من جميع المصادر باستخدام كاشف واحد فقط.
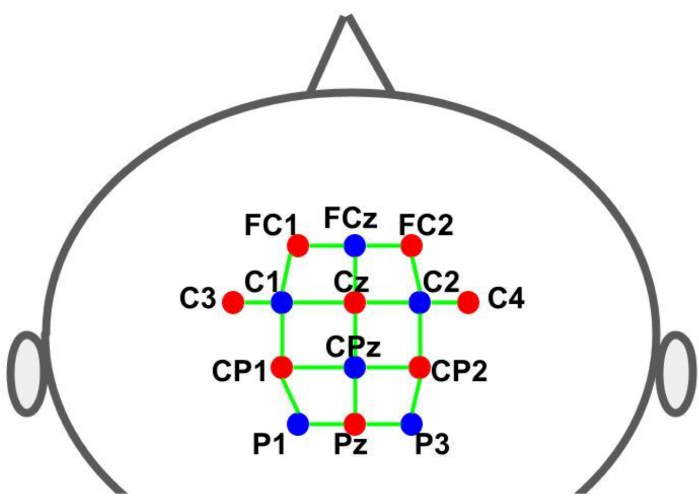
الشكل 2: تخطيط المونتاج باستخدام نظام 10-10 EEG. تشير الأحرف والأرقام إلى مواقع المصدر / الكاشف. تمثل النقطتان الحمراء والزرقاء بصريات المصدر والكاشف ، على التوالي. تمثل الخطوط الخضراء قنوات fNIRS التي تتكون من أزواج المصدر والكاشف. يرجى النقر هنا لعرض نسخة أكبر من هذا الرقم.
التصميم التجريبي
أجريت التجربة في ظل شرطين تجريبيين متميزين ، يختلفان في مستوى المساعدة التي يقدمها الروبوت لحركات الموضوع. في الحالة الأولى ، تمت برمجة الروبوت بحيث لا يقدم أي مساعدة لحركات الشخص ، بينما في الحالة الثانية ، يتحكم الروبوت في حركات قدم وساق الشخص (الحركة بمساعدة الروبوت).
اتبعت كل تجربة نموذج تصميم كتلة يتضمن دورات متناوبة لمهمة حركية (لعب اللعبة – 30 ثانية) والراحة (30 ثانية) ، كما هو موضح في الشكل 3. تم الإشارة بصريا إلى بداية ونهاية كل مرحلة (اللعب / اللعبة أو الراحة) للموضوع من خلال شاشة الكمبيوتر. خلال مرحلة الراحة ، تم عرض رسالة تشير إلى توقف مؤقت. كانت مدة كل دورة (لعب / لعبة + راحة) 60 ثانية وتكررت ست مرات ، مما أدى إلى وقت تشغيل إجمالي يبلغ 360 ثانية (6 دقائق).
لعب المشاركون “لعبة النزهة” ، حيث كان الهدف هو منع الحشرات من الوصول إلى المنشفة وسرقة الطعام. تضمنت هذه اللعبة سلسلة من حركات الأطراف السفلية ، بدءا من هدف منزلي معين (الموضع الأولي) وتمتد نحو أحد الأهداف الخارجية الثلاثة قبل العودة إلى الهدف الرئيسي. على الشاشة ، تم تمثيل الأهداف الخارجية بصريا كحشرات متحركة متحركة ، والتي كان على المشاركين الوصول إليها والتقدم إليها. كانت هناك ثلاثة أهداف خارجية ، تم تقديم كل منها بشكل عشوائي لعدد متساو من المرات ، إلى جانب هدف منزلي مشترك لكل حركة. شكلت المسافة التي تحتاجها القدم للانتقال من الهدف الرئيسي إلى موضع الأهداف الخارجية قوسا يبلغ قياسه 26 سم تقريبا. تتطلب المهمة الحركية تنفيذ حركات متعددة المفاصل ، مما يتطلب التنسيق بين ثني / تمديد الركبة ، والانثناء الأخمصي ، وحركات الانثناء الظهري.
تمت مزامنة تسجيلات بيانات fNIRS مع المحفزات البصرية التي تقدمها اللعبة للموضوع من خلال نبض منطق الترانزستور الترانزستور (TTL) الناتج عن الروبوت. تم توليد البقول في بداية كل مرحلة (اللعب / اللعبة والراحة). وهكذا ، تم تنفيذ جميع عمليات التحكم في التوقيت بواسطة اللعبة ، والتي قدمت إشارات بصرية (أهداف) للمشارك لبدء كل حركة ، وأرسلت إشارات TTL إلى نظام fNIRS لتحديد تسجيلات نشاط الدماغ ، وإذا اقتضت التجربة ذلك ، أرسلت إشارات إلى نظام التحكم في الروبوت لبدء مساعدة الحركة.
