إجراءات مهمة محددة تبرز من الحركات العفوية في مرحلة الطفولة. وقد اقترح أن إجراءات مهمة محددة تبرز من خلال عملية 1،2 التعلم الاكتشاف. اكتشاف المهام من قبل الأطفال الرضع لأنها عفوية التحرك واستكشاف الإجراءات التي تنتج آثار جديدة في البيئة. إجراءات مهمة محددة تظهر وكأنها الرضع استغلال الصلات بين أفعالهم وآثارها على العالم من حولهم. ومع ذلك، لا يعرف إلا القليل عن العمليات الدقيقة التي الرضع استكشاف واستغلال لتعلم لتعديل حركاتهم العفوية لتنفيذ إجراءات مهمة محددة. هنا يتم وصف أسلوب الذي الرضع بعمر 3-4 أشهر تتعلم مهمة قبل اكتشاف وألقت القبض على حركات الساق لتحديد عملية التعلم.

الشكل 1: الرضع تنشيط الركل مهمة النقالة. </قوية> مركز ينبعث منها ضوء الصمام الثنائي (LED) التي تعلق على جسم جامد من كل قدم (دائرة صفراء) ينشط المحمول عندما يعبر عتبة الظاهرية (خط متقطع أحمر). إعادة طبع بإذن من سارجنت وآخرون. 3
هذه المهمة التعلم اكتشاف يستخدم لتنشيط المحمول الرضع التي تدور وتلعب الموسيقى على أساس عمل المحطة المحددة للرضع 3. الرضع وضعت مستلق تحت المحمول تفعيلها عن طريق تحريك أقدامهم عموديا عبر عتبة الظاهرية (الشكل 1). هذا نموذج فريد من نوعه في أنه الرضع اكتشاف مستقل أن الإجراءات ساقهم تفعيل المحمول، يتم تعقب حركات الساق الرضع "باستخدام نظام التقاط الحركة مما يسمح لتقدير حجم عملية التعلم.
ويتضمن البروتوكول التجريبي يومين من جمع البيانات. يوم 1 يتكون من حالة أساسية 2 دقيقة في الرضيع الذي يبدأ من تلقاء أنفسهم ولكن الإجراءات ساقهلا يمكن تفعيل الرضع المحمول، تليها 6 دقائق حالة الاستحواذ في الإجراءات التي الرضيع الساق تفعيل الرضع المحمول في حالة الرضيع يتحرك قدميه عموديا لعبور عتبة افتراضية. هذا البروتوكول يسمح لتقدير حجم الأعمال الساق عفوية الرضع وكذلك الكمي لمختلف جوانب الحركات الرضع استكشاف العلاقة بين الإجراءات الساق وتفعيل الرضع المحمول. في يوم 2، بالإضافة إلى حالة أساسية 2 دقيقة و 6 دقائق حالة الشراء، يتم إضافة شرط انقراض 2 دقيقة في الإجراءات التي الرضيع الساق لا تفعيل الرضع المحمول. وهذا يسمح لتقدير حجم كيف الرضع تتغير الإجراءات ساقهم عندما يتم التوقف عن الاستجابة البيئية تعلمت بالفعل.
في النماذج السابقة الرضع النقالة، وتواتر حركة الساق 4-6، والورك والركبة زوايا محددة 7،8، أو ركل لوحة 9 كانت reinforcإد مع حركة النقالة. تم تحديد أداء كل يوم حيث أن زيادة هذه الإجراءات الساق خلال الاستحواذ أو الانقراض حالة بالمقارنة مع حالة الأساس 4-9. التعلم عبر أيام كان يعرف بأنه زيادة في هذه الإجراءات الساق خلال خط الأساس أو الاستحواذ حالة من يوم 2 أو 3 والشرط الأساس من يوم 1 5،6. وتوضح هذه النماذج النقالة السابقة التي الرضع تزيد من وتيرة الإجراءات الساق التي عززت تفعيل المحمول، إلا أنها لا توفر معلومات عن حركة الخيارات الرضع لديهم المتاحة لهم عندما تعلم المهمة. على سبيل المثال، إذا تم تعزيز معدل الركل والرضع اظهار الاداء والتعلم عندما يزيد معدل الركل بهم إما عند التعامل مع الهاتف الجوال أو الهاتف النقال عندما لم يعد ينشط. هذا يدل على أن الأطفال الرضع يمكن صقل معدل الركل، ولكن من غير المعروف إذا الرضع يمكن صقل نمط أو عزم الدوران الإنتاج التنسيق ساقهم إلى generatالإجراءات الساق الإلكترونية التي ليست ضمن المفضل حركة ذخيرتهم.
هذا النموذج المحمول هي فريدة من نوعها في ذلك الرضع مطلوبة لإثبات عمل المحطة أكثر دقة لتفعيل المحمول مما كانت عليه في النماذج النقالة السابقة. في هذا النموذج المحمول، ويتم احتساب ارتفاع كل قدم فوق الطاولة خلال الشرط الأساس 2 دقيقة باستخدام بيانات الموقع من التي ينبعث منها ضوء الصمام الثنائي (LED) تعلق على كل قدم. ثم يتم وضع عتبة افتراضية موازية لطاولة في الارتفاع الذي يقع ضمن النطاق العلوي من ارتفاع كلا القدمين أثناء حالة خط الأساس. خلال الاستحواذ، تدور المحمولة وتلعب الموسيقى إذا إما القدم يعبر عتبة. بعد 3 ثوان، توقف النقالة وينشط إلا إذا كان الرضيع يتحرك القدم تحت عتبة، ثم ينتقل القدم عموديا ومرة أخرى تعبر العتبة. لتفعيل المحمول لأكبر قدر من الوقت، تحتاج الرضع لتحريك القدم فوق عتبة والحفاظ عليه ضد المرقإيتي لمدة 3 ثوان، ثم التحرك بسرعة القدم تحت عتبة ومرة أخرى تحريكه فوق عتبة والاحتفاظ بها هناك لمدة 3 ثوان، الخ. وهذا يتطلب عمل المحطة أكثر دقة من مجرد زيادة معدل الركل.
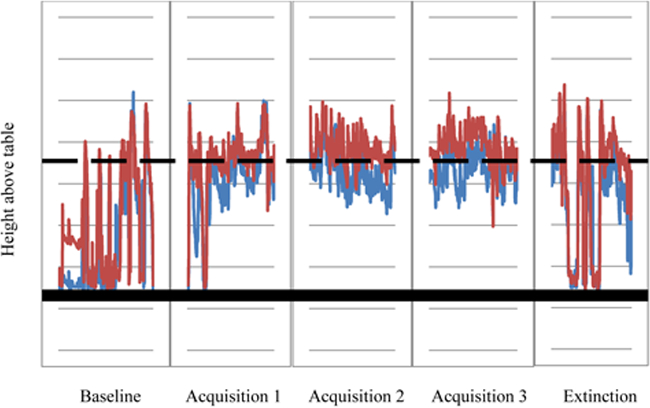
الشكل 2: بيانات الموقع التي لم تتم تصفيتها من المؤثرات نهاية (أقدام) من الرضع تمثيلي بيانات الموقع غير مرشح من يوم 2 لرضيع يبلغ من العمر 3 أشهر الذين تظاهروا التعلم القائم على معايير التعلم الفردية. الخط الأحمر هو بيانات موقف ض تنسيق من الصمام الثنائي الباعثة للضوء (LED) وضعت في القدم اليمنى. الخط الأزرق هو البيانات الموقف من LED على القدم اليسرى. خط أسود سميك هو الجدول. خط منقط هو عتبة افتراضية وضعت 14 سم فوق الطاولة كما فردي المقررة لكل الرضع على أساس ارتفاع لها خلال الركل الأساسحالة من يوم 1. X-محور هو الوقت المسمى بنسبة 2 فترات دقيقة. لاحظ كيف الرضيع يتحرك قدميه خلال خط الأساس عندما لا يتم تنشيط الهاتف النقال وخلال ثانية 30 الأول من الاستحواذ 1، ثم قال انه يحتفظ باستمرار كلا القدمين من على الطاولة ويتحرك قدميه حق حول عتبة 5½ دقيقة المقبل حتى المحمول لم يعد ينشط خلال حالة انقراض.
الميزة الثانية الفريدة لهذا النموذج المحمول هو أن يتم متابعة عمل كل الرضيع الساق باستخدام أحدث ما وصلت إليه تقنيات التقاط الحركة لتحديد كيفية الرضع استخدام خيارات حركتهم لتعلم المهمة. يتم تضمين بيانات الموقع التي لم تتم تصفيتها من الصمام في كل قدم الذي ينشط النقال من الرضع ممثل واحد في الشكل 2. لاحظ كيف الرضيع يتحرك قدميه على ارتفاعات مختلفة فوق الطاولة خلال خط الأساس والجزء الأول من الشراء، ولكن بعد ذلك يتحرك كلا القدمين حق حول عتبة خلال ما تبقى من كوندي اكتسابنشوئها حتى الهاتف النقال لم يعد ينشط خلال الانقراض. هذا هو واحد من العديد من الاستراتيجيات الحركة المحتملة لإنجاز المهمة التعلم الاكتشاف. استراتيجيات يمكن قياسها كميا عن طريق حساب الكينماتيكا وحركية ثلاثية الأبعاد باستخدام بيانات الموقع تم الحصول عليها من نظام التقاط الحركة. على وجه التحديد، وكميا في العملية التعليمية من حيث النسبة المئوية لتعزيز العمل الساق (٪ RLA)، أي ما يعادل مدة التنشيط المحمول، وموقف الفرق من المؤثرات نهاية (أقدام) التي تنشط الهاتف النقال، وأنماط التنسيق الهيب الركبة والورك والركبة العزم المشتركة.
