Epidemiologiske data viser, at der på verdensplan er ~ 17 millioner nye tilfælde af slagtilfælde hvert år, med en stigning i forekomsten i lav- og mellemindkomstlande1. Antallet af nye tilfælde anslås at stige til 77 millioner i 20302. Motorisk svækkelse på grund af slagtilfælde påvirker ofte patientens mobilitet og deltagelse i dagligdagens aktiviteter, hvilket bidrager til en lav livskvalitet. Traditionel motorisk rehabilitering omfatter manuel terapi, men i løbet af de sidste par årtier er robotsystemer til rehabilitering blevet udviklet. Disse systemer kan levere terapi ved høj intensitet, dosis, kvantificerbarhed, pålidelighed, repeterbarhed og fleksibilitet3 og har vist potentiale som effektive rehabiliteringsbehandlinger for både akutte og kroniske slagtilfældepatienter 4,5,6. Ud over at levere terapi kan robotsystemer til rehabilitering bruges som evalueringsværktøjer, da de kan udstyres med sensorer, der kan måle kinematiske/kinetiske dataom patientbevægelser 7,8. Til motorisk rehabilitering af øvre ekstremiteter har sådanne data ikke kun vist sig at være nyttige til vurdering af niveauet af patientens motoriske opsving fremkaldt af robotterapi og tjent som et supplerende værktøj til traditionelle kliniske vurderinger 9,10, men det har også bidraget til at fremme forståelsen af processen med motorisk genopretning fra slagtilfælde11, 12 samt neural kontrol af bevægelse og motorisk læring hos raske forsøgspersoner 3,13,14. Som følge heraf har disse resultater givet et grundlag for at forbedre rehabiliteringsbehandlinger15.
I løbet af de sidste to årtier er der blevet foreslået mange robotindretninger til neurorehabilitering af underekstremiteter, der spænder fra exoskeletter, der understøtter patientens kropsvægt under gang (f.eks. Over et løbebånd, såsom Lokomat16) til stationære robotsystemer, der gør det muligt for patienten at udøve ankel, knæ eller fod uden at gå (såsom Rutgers Ankel17, High-Performance Ankel Rehabilitation Robot18 og Gwangju Institute of Science and Technology (GIST) ankel / fod rehabiliteringsrobot19) eller aktive fodortoser, der er aktiverede exoskeletter, der bæres af patienten til at gå over jorden eller over et løbebånd (såsom Powered Gait Orthosis20 og MIT Anklebot21). Se 22,23,4 for en gennemgang af robotter til rehabilitering af underekstremiteter.
Resultaterne af kliniske undersøgelser af robotudstyr til rehabilitering af underekstremiteter på patienter med slagtilfælde har været opmuntrende og har vist, at disse systemer kan forbedre leddenes bevægelsesområde (ROM), muskelstyrke eller gang, afhængigt af det specifikke udstyr og den kliniske protokol (se 24,25 for en gennemgang af effektiviteten af robotter i underekstremiteter til rehabilitering). Mens det er blevet postuleret, at robotassisteret terapi fremmer neuroplastiske ændringer, som i sidste ende resulterer i forbedrede motoriske evner26, forbliver det for det meste uklart, hvordan processen med motorisk genopretning fra slagtilfælde nøjagtigt opstår, og hvilke robottræningsprotokoller der optimerer processen med genopretning af motoriske evner i underekstremiteterne. Faktisk er der en signifikant, voksende forskel mellem den stigende udvikling af rehabiliteringsrobotter (enten af akademiske forskere eller kommercielle enheder) og den begrænsede forståelse af de neurofysiologiske mekanismer, der ligger til grund for motorisk restitution4. Målinger af bevægelseskinematik eller leddrejningsmomenter taget med indlejrede sensorer har bidraget til kvantitativt at beskrive motoriske adfærdsændringer, der opstår, når patienter genvinder motoriske evneri underekstremiteterne 27,28,29, hvilket delvist udfylder dette hul. Imidlertid er de neurale korrelater, der ligger til grund for sådanne ændringer, blevet mindre undersøgt. Dette skyldes flere grunde.
Hjernefunktionel billeddannelse er tidskrævende og undertiden vanskelig at gennemføre i forbindelse med kliniske forsøg, som ofte kræver at holde patientbyrden minimal for at maksimere sandsynligheden for, at patienten overholder undersøgelsen. Dette gælder især for personer, der har lidt et slagtilfælde, da træthed og muskelsvaghed efter slagtilfælde ofte observeres30. Også billeddannelsesmetoder, der er baseret på magnetfelter, såsom funktionel magnetisk resonansbilleddannelse (fMRI), kræver, at både patient- og robothardware er magnetsikker.
Blandt ikke-invasive billeddannelsesmetoder er funktionel nær-infrarød spektroskopi (fNIRS) en billeddannelsesteknik, der er særligt velegnet til vurdering af områder med hjerneaktivering hos forsøgspersoner, der gennemgår robotterapi. På samme måde som fMRI måler fNIRS blodets iltning/deoxygenering i hjernen. I modsætning til fMRI er fNIRS imidlertid fuldt kompatibel med robothardware, og den er ofte bærbar, endda anvendelig ved sengen. fNIRS har også lave omkostninger og mindre følsomhed over for bevægelsesartefakter 31,32,33.
På trods af dets klare fordele og udbredt anvendelse i mange kliniske indstillinger siden den første introduktion i slutningen af 70’erne34, har kun få undersøgelser brugt fNIRS til at kvantificere hjerneaktivering forbundet med underekstremitetsbevægelser og slagtilfælde motorisk opsving. FNIRS-undersøgelser, der sigter mod at belyse mekanismer for neural kontrol af bevægelse og / eller mekanismer eller evaluering af motorisk genopretning fra slagtilfælde, har for det meste undersøgt enkeltledsbevægelser (f.eks. Dorsiflexion, plantarfleksion eller knæforlængelsesbevægelser35,36,37), gå 38,39,40,41,42,43 eller cykle44. Se45 for en gennemgang. Tilsvarende har fNIRS-undersøgelser af robotassisteret terapi til underekstremiteterne hovedsagelig fokuseret på robotassisteret gangrehabilitering; Se46 for en gennemgang. Et par undersøgelser har fokuseret på at bruge fNIRS som en del af et Brain-Computer Interface (BCI) -system til at udlede styresignaler til robotenheder47,48; mens dette forskningsområde også er afhængig af behandling af fNIRS-signaler, er dets mål anderledes og primært fokuseret på afkodning af patientintentioner (f.eks. Patienter med alvorlige motoriske handicap).
Pilotstudiet, der præsenteres heri, er en del af en indledende indsats for at undersøge virkningerne af et robotsystem til rehabilitering af underekstremiteter. Robotten kan levere målrettet rehabilitering af underekstremiteter, der involverer træning i hverdagens flerledsbevægelser samt levere terapi til enkelte led (f.eks. Knæ eller ankel) i underekstremiteten (dvs. implementere et bottom-up rehabiliteringsprogram).
Undersøgelsen havde til formål at undersøge gennemførligheden af en eksperimentel protokol, der krævede erhvervelse af fNIRS-data under udførelsen af underekstremiteter, multiledsbevægelser. Varigheden af dataindsamlingsperioden i denne undersøgelse, som var begrænset til 6 min, er kortere end typiske fNIRS-protokoller. Dette var et bevidst valg truffet med det formål at forbedre den praktiske og kliniske anvendelighed af denne forskning, især hos patienter med begrænset mobilitet eller styrke. Identifikation af fNIRS-korrelater af sådanne komplekse flerledsbevægelser og indsigt i, hvordan hjerneaktivering blev moduleret af robotassistance, var også interessepunkter. Til dette formål blev der udført to forsøgssessioner med de samme deltagere: en uden robotassistance og en med robotassistance. Endelig er det vigtigt at bemærke, at denne undersøgelse fokuserede på raske forsøgspersoner for at etablere et fundament for fremtidig forskning med hensyn til registrering af protokolgennemførlighed og evaluering af hjerneaktivering under bevægelser målrettet mod robotterapi.
Apparat
En bærbar robot designet til at levere rehabilitering af underekstremiteter (se figur 1) blev brugt til at udføre vores eksperimenter. Robotten har et 3D-tilgængeligt arbejdsområde og er kompakt og let og vejer ca. 35 lb., Hvilket gør det nemt at transportere og installere.
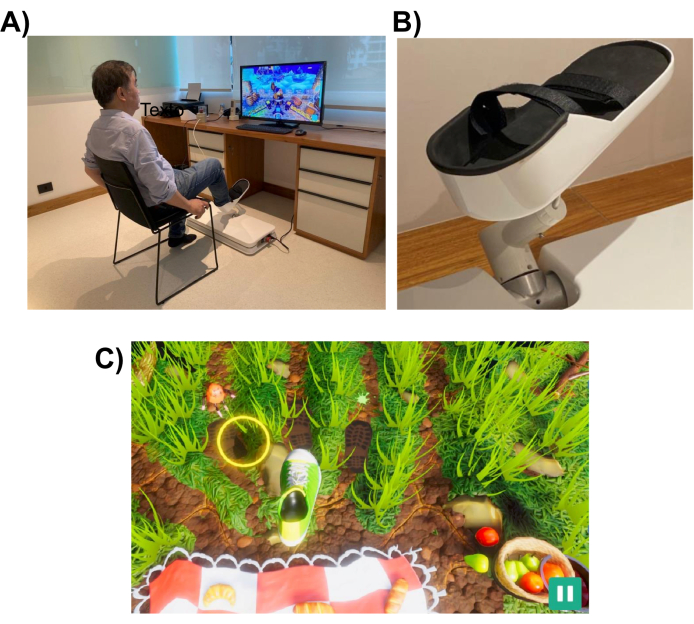
Figur 1: Eksperimentel opsætning. (A) Robotsystemet (installeret på gulvet) designet til underekstremiteten. En frivillig vises ved hjælp af grænsefladen med deres højre fod. (B) Støttestruktur for motivets fod, der muliggør fastgørelse til robotsystemet. (C) Et skærmbillede af Picnic-spillet. Formålet med spillet er at flytte foden (grøn og hvid sko) til målet (gul cirkel). Klik her for at se en større version af denne figur.
Robotsystemet er designet til at hjælpe en patient med at udføre bevægelser i underekstremiteterne svarende til dem, der udføres i hverdagens opgaver, såsom at pege eller sparke. Det bruger interaktive virtual reality-spil, som vises på en computerskærm eller en tv-skærm placeret foran robotenheden (se figur 1). Roboteffektoren er fastgjort til patientens underekstremitet (f.eks. Ankel), og dens position er kortlagt til placeringen af en markør på skærmen. Et typisk spil viser patientens bevægelsesmål (f.eks. objektet, der skal peges på, eller hvor bolden skal sparkes).
For at fuldføre bevægelsesopgaven kan robotten hjælpe patienten med et niveau af assistance, der kan variere fra fuld hjælp til ingen. Niveauet af robotassistance vælges i begyndelsen af hver rehabiliteringssession baseret på patientens niveau af motorisk svækkelse. De bevægelser, der udføres af motivet, bruges af spillet til at score patientens præstation og give dem feedback om deres præstationer (f.eks. ROM, antal bevægelser og niveau af robotassistance). Spillene er designet til at være interaktive og underholdende for at opretholde patientens interesse og opmærksomhed. I denne undersøgelse spillede deltagerne “Picnic-spillet”, hvor spilleren skulle stoppe insekterne fra at nå håndklædet og stjæle maden (se figur 1, nederste panel, for et skærmbillede).
Dataindsamling blev udført med et bærbart fNIRS-optagelsessystem med to forskellige kontinuerlige bølgeoptoder (760 nm og 850 nm), 8 dual-tip LED-kilder, og 8 dual-tip aktive detektorer. Signalerne blev erhvervet ved hjælp af en samplingshastighed på 10, 17 Hz. En bærbar computer blev brugt til kalibreringsoptimering og signaloptagelse ved hjælp af et Wi-Fi-netværk oprettet af fNIRS-systemet.
En hætte blev brugt til at holde optoderne på de forudbestemte steder. Kilderne og detektorerne blev placeret i henhold til det 10-10 internationale EEG-system i en netrumlig fordeling. Hver fNIRS-kanal blev defineret af et kildedetektorpar med inter-optodeafstande på ca. 30 mm. Optoderne blev placeret over de supplerende motor-, præmotor- og motorområder på de steder, der er vist i figur 2. Det samlede antal kanaler var 28, hvor 8 var kortdistancekanaler, der blev koblet til hver kilde ved hjælp af en fiberoptisk adapter til en enkelt detektor. I betragtning af multiplexingopsætningen af hardwaren er det muligt at erhverve kortdistanceinformation fra alle kilder ved hjælp af kun en detektor.
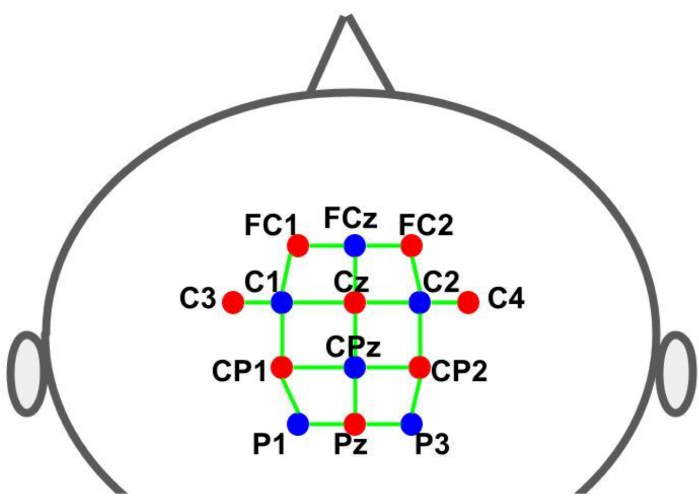
Figur 2: Montage layout ved hjælp af 10-10 EEG systemet. Bogstaverne og tallene angiver kilde-/detektorplaceringerne. De røde og blå prikker repræsenterer henholdsvis kilde- og detektoroptoder. De grønne linjer repræsenterer fNIRS-kanalerne, som består af kilde- og detektorpar. Klik her for at se en større version af denne figur.
Eksperimentelt design
Eksperimentet blev udført under to forskellige eksperimentelle betingelser, der adskiller sig i niveauet af hjælp fra robotten til forsøgspersonens bevægelser. I den første tilstand var robotten programmeret til ikke at yde nogen hjælp til forsøgspersonens bevægelser, mens robotten i den anden tilstand styrede forsøgspersonens fod- og benbevægelser (robotassisteret bevægelse).
Hvert eksperiment fulgte et blokdesignparadigme, der involverede vekslende cyklusser af en motorisk opgave (spiller spillet – 30 s) og hviler (30 s), som illustreret i figur 3. Start og afslutning af hver fase (leg/spil eller hvile) blev visuelt signaleret til motivet gennem computerskærmen. Under hvilefasen blev der vist en meddelelse, der angiver en pause. Hver cyklus (spil / spil + hvile) havde en varighed på 60 s og blev gentaget seks gange, hvilket resulterede i en samlet køretid på 360 s (6 min).
Deltagerne spillede “Picnic-spillet”, hvor målet var at forhindre insekter i at nå håndklædet og stjæle mad. Dette spil involverede en sekvens af bevægelser i underekstremiteterne, startende fra et udpeget hjemmemål (startposition) og strakte sig mod et af tre ydre mål, før de vendte tilbage til hjemmemålet. På skærmen blev de ydre mål visuelt repræsenteret som animerede bevægelige insekter, som deltagerne skulle nå og træde på. Der var tre ydermål, hver tilfældigt præsenteret et lige antal gange sammen med et fælles hjemmemål for hver bevægelse. Den afstand, som foden havde brug for for at rejse fra hjemmemålet til positionen af de ydre mål, dannede en bue, der ca. måler 26 cm. Motoropgaven krævede udførelse af flerledsbevægelser, der krævede koordinering mellem knæbøjning / forlængelse, plantarfleksion og dorsiflexionbevægelser.
fNIRS-dataoptagelserne blev synkroniseret med de visuelle stimuli, som spillet præsenterede for motivet gennem en transistor-transistor-logik (TTL) puls genereret af robotten. Impulser blev genereret i begyndelsen af hver fase (leg / spil og hvile). Således blev al timingkontrol udført af spillet, som gav visuelle signaler (mål) til deltageren om at starte hver bevægelse, sendte TTL-signaler til fNIRS-systemet for at markere hjerneaktivitetsregistreringerne og, hvis det kræves af eksperimentet, sendte signaler til robotstyringssystemet for at starte bevægelsesassistance.
