Epidemiologische Daten zeigen, dass es weltweit jedes Jahr ~17 Millionen neue Schlaganfallfälle gibt, wobei die Inzidenz in Ländern mit niedrigem und mittlerem Einkommen zunimmt1. Die Zahl der neuen Fälle wird bis 2030 schätzungsweise auf 77 Millionen ansteigen2. Motorische Beeinträchtigungen aufgrund eines Schlaganfalls beeinträchtigen häufig die Mobilität des Patienten und die Teilnahme an Aktivitäten des täglichen Lebens und tragen zu einer geringen Lebensqualität bei. Die traditionelle motorische Rehabilitation umfasst die manuelle Therapie, aber in den letzten Jahrzehnten wurden Robotersysteme für die Rehabilitation entwickelt. Diese Systeme können Therapien mit hoher Intensität, Dosis, Quantifizierbarkeit, Zuverlässigkeit, Wiederholbarkeit und Flexibilität liefern3 und haben sich als wirksame Rehabilitationsbehandlungen sowohl für akute als auch für chronische Schlaganfallpatienten erwiesen 4,5,6. Neben der Therapie können Robotersysteme für die Rehabilitation auch als Bewertungsinstrumente eingesetzt werden, da sie mit Sensoren ausgestattet werden können, die kinematische/kinetische Daten der Patientenbewegung messen können 7,8. Für die motorische Rehabilitation der oberen Extremitäten haben sich solche Daten nicht nur als nützlich erwiesen, um den Grad der motorischen Erholung des Patienten durch die Robotertherapie zu beurteilen, und dienten als ergänzendes Instrument zu herkömmlichen klinischen Bewertungen 9,10, sondern sie haben auch dazu beigetragen, das Verständnis des Prozesses der motorischen Erholung nach einem Schlaganfallzu verbessern 11. 12 sowie neuronale Kontrolle von Bewegung und motorischem Lernen bei gesunden Probanden 3,13,14. Infolgedessen haben diese Ergebnisse eine Grundlage für die Verbesserung von Rehabilitationsbehandlungen geschaffen15.
In den letzten zwei Jahrzehnten wurden viele Robotergeräte für die Neurorehabilitation der unteren Extremitäten vorgeschlagen, von Exoskeletten, die das Körpergewicht des Patienten beim Gehen unterstützen (z. B. über einem Laufband, wie Lokomat16), bis hin zu stationären Robotersystemen, die es dem Patienten ermöglichen, den Knöchel, das Knie oder den Fuß zu trainieren, ohne zu gehen (wie das Rutgers Ankle17, der Hochleistungs-Knöchelrehabilitationsroboter18 und der Knöchel-Fuß-Rehabilitationsroboter19 des Gwangju Institute of Science and Technology (GIST) oder aktive Fußorthesen, bei denen es sich um betätigte Exoskelette handelt, die vom Patienten getragen werden, um über den Boden oder über ein Laufband zu gehen (wie die Powered Gait Orthosis20 und der MIT Anklebot21). Siehe 22,23,4 für einen Überblick über Roboter für die Rehabilitation der unteren Gliedmaßen.
Die Ergebnisse klinischer Studien zu Robotergeräten zur Rehabilitation der unteren Gliedmaßen bei Schlaganfallpatienten waren ermutigend und haben gezeigt, dass diese Systeme den Bewegungsumfang (ROM), die Muskelkraft oder den Gang der Gelenke je nach spezifischem Gerät und klinischem Protokoll verbessern können (siehe 24,25 für eine Übersicht über die Wirksamkeit von Robotern für die unteren Extremitäten für die Rehabilitation). Während postuliert wurde, dass die robotergestützte Therapie neuroplastische Veränderungen fördert, die letztendlich zu verbesserten motorischen Fähigkeiten führen26, bleibt weitgehend unklar, wie der Prozess der motorischen Erholung nach einem Schlaganfall genau abläuft und welche Robotertrainingsprotokolle den Prozess der Wiederherstellung der motorischen Fähigkeiten der unteren Extremitäten optimieren. Tatsächlich gibt es eine signifikante, wachsende Diskrepanz zwischen der zunehmenden Entwicklung von Rehabilitationsrobotern (entweder durch akademische Forscher oder kommerzielle Einrichtungen) und dem begrenzten Verständnis der neurophysiologischen Mechanismen, die der motorischen Erholung zugrunde liegen4. Messungen der Bewegungskinematik oder der Gelenkdrehmomente, die mit eingebetteten Sensoren durchgeführt wurden, haben dazu beigetragen, motorische Verhaltensänderungen quantitativ zu beschreiben, die auftreten, wenn Patienten die motorischen Fähigkeiten der unteren Extremitäten wiedererlangen 27,28,29, und diese Lücke teilweise schließen. Die neuronalen Korrelate, die solchen Veränderungen zugrunde liegen, wurden jedoch weniger untersucht. Dies hat mehrere Gründe.
Die funktionelle Bildgebung des Gehirns ist zeitaufwändig und manchmal schwierig im Zusammenhang mit klinischen Studien durchzuführen, die oft eine minimale Patientenbelastung erfordern, um die Wahrscheinlichkeit der Patientenbeteiligung an der Studie zu maximieren. Dies gilt insbesondere für Personen, die einen Schlaganfall erlitten haben, da nach einem Schlaganfall häufig Müdigkeit und Muskelschwäche beobachtet werden30. Auch Bildgebungsmodalitäten, die auf Magnetfeldern basieren, wie z. B. die funktionelle Magnetresonanztomographie (fMRT), erfordern, dass sowohl die Patienten- als auch die Roboterhardware magnetsicher sind.
Unter den nicht-invasiven Bildgebungsmodalitäten ist die funktionelle Nahinfrarotspektroskopie (fNIRS) ein bildgebendes Verfahren, das sich besonders für die Beurteilung von Bereichen der Gehirnaktivierung bei Probanden eignet, die sich einer Robotertherapie unterziehen. Ähnlich wie fMRT misst fNIRS die Sauerstoffversorgung des Blutes im Gehirn. Im Gegensatz zu fMRT ist fNIRS jedoch vollständig kompatibel mit Roboterhardware, und es ist oft tragbar und kann sogar am Krankenbett verwendet werden. Außerdem hat fNIRS niedrige Kosten und eine geringere Empfindlichkeit gegenüber Bewegungsartefakten 31,32,33.
Trotz seiner klaren Vorteile und seiner weit verbreiteten Verwendung in vielen klinischen Umgebungen seit seiner Einführung in den späten 70er Jahren34 haben nur wenige Studien fNIRS verwendet, um die Gehirnaktivierung im Zusammenhang mit Bewegungen der unteren Gliedmaßen und der motorischen Erholung des Schlaganfalls zu quantifizieren. FNIRS-Studien, die darauf abzielten, Mechanismen der neuronalen Bewegungskontrolle und/oder Mechanismen aufzuklären oder die motorische Erholung nach einem Schlaganfall zu bewerten, untersuchten hauptsächlich eingelenkige Bewegungen (z. B. Dorsalflexion, Plantarflexion oder Kniestreckbewegungen35,36,37), Gehen 38,39,40,41,42,43 oder Radfahren44. Siehe45 für eine Rezension. In ähnlicher Weise haben sich fNIRS-Studien zur robotergestützten Therapie der unteren Extremität hauptsächlich auf die robotergestützte Gangrehabilitation konzentriert; siehe46 für eine Rezension. Einige Studien haben sich auf die Verwendung von fNIRS als Teil eines Gehirn-Computer-Schnittstellensystems (BCI) konzentriert, um Steuersignale für Robotergeräte abzuleiten47,48; Während dieser Forschungsbereich auch auf die Verarbeitung von fNIRS-Signalen angewiesen ist, ist sein Ziel ein anderes und konzentriert sich hauptsächlich auf die Dekodierung von Patientenabsichten (z. B. Patienten mit schweren motorischen Behinderungen).
Die hier vorgestellte Pilotstudie ist Teil eines ersten Versuchs, die Auswirkungen eines Robotersystems für die Rehabilitation der unteren Extremitäten zu untersuchen. Der Roboter kann eine zielgerichtete Rehabilitation der unteren Extremitäten durchführen, die das Training alltäglicher Mehrgelenksbewegungen sowie die Therapie einzelner Gelenke (z. B. Knie oder Knöchel) der unteren Extremität umfasst (d. h. ein Bottom-up-Rehabilitationsprogramm durchführen).
Die Studie zielte darauf ab, die Durchführbarkeit eines experimentellen Protokolls zu untersuchen, das die Erfassung von fNIRS-Daten während der Ausführung von mehrgelenkigen Zeigebewegungen der unteren Extremitäten erfordert. Die Dauer der Datenerfassungsdauer in dieser Studie, die auf 6 Minuten begrenzt war, ist kürzer als bei typischen fNIRS-Protokollen. Dies war eine bewusste Entscheidung mit dem Ziel, die Praktikabilität und klinische Anwendbarkeit dieser Forschung zu verbessern, insbesondere bei Patienten mit eingeschränkter Mobilität oder Kraft. Die Identifizierung von fNIRS-Korrelaten solcher komplexen Mehrgelenkbewegungen und die Gewinnung von Erkenntnissen darüber, wie die Gehirnaktivierung durch Roboterassistenz moduliert wurde, waren ebenfalls von Interesse. Zu diesem Zweck wurden zwei Experimente mit denselben Teilnehmern durchgeführt: eine ohne Roboterunterstützung und eine mit Roboterunterstützung. Schließlich ist es wichtig anzumerken, dass sich diese Studie auf gesunde Probanden konzentrierte, um eine Grundlage für zukünftige Forschungen in Bezug auf die Aufzeichnung der Durchführbarkeit von Protokollen und die Bewertung der Gehirnaktivierung während der von der Robotertherapie gezielten Bewegungen zu schaffen.
Apparat
Für die Durchführung unserer Experimente wurde ein tragbarer Roboter verwendet, der für die Rehabilitation der unteren Gliedmaßen entwickelt wurde (siehe Abbildung 1). Der Roboter verfügt über einen in 3D erreichbaren Arbeitsbereich und ist mit einem Gewicht von etwa 35 Pfund kompakt und leicht, was den Transport und die Installation erleichtert.
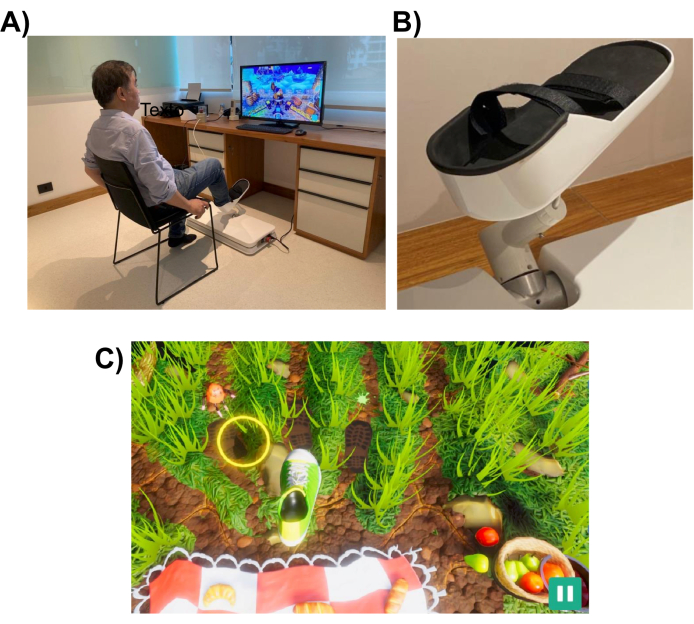
Abbildung 1: Versuchsanordnung. (A) Das Robotersystem (auf dem Boden installiert) für die untere Extremität. Ein Freiwilliger wird gezeigt, wie er die Schnittstelle mit seinem rechten Fuß benutzt. (B) Stützstruktur für den Fuß des Probanden, die die Befestigung am Robotersystem ermöglicht. (C) Ein Screenshot des Picnic-Spiels. Ziel des Spiels ist es, den Fuß (grüner und weißer Schuh) zum Ziel (gelber Kreis) zu bewegen. Bitte klicken Sie hier, um eine größere Version dieser Abbildung anzuzeigen.
Das Robotersystem wurde entwickelt, um einen Patienten bei der Ausführung von Bewegungen der unteren Gliedmaßen zu unterstützen, die denen bei alltäglichen Aufgaben wie Zeigen oder Treten ähneln. Es verwendet interaktive Virtual-Reality-Spiele, die auf einem Computermonitor oder einem Fernsehbildschirm vor dem Robotergerät angezeigt werden (siehe Abbildung 1). Der Roboter-Endeffektor wird an der unteren Extremität des Patienten (z. B. Knöchel) befestigt und seine Position wird der Position eines Cursors auf dem Bildschirm zugeordnet. Ein typisches Spiel zeigt dem Patienten Bewegungsziele (z. B. das Objekt, auf das er zeigen oder wohin er den Ball treten soll).
Um die Bewegungsaufgabe zu erledigen, kann der Roboter den Patienten mit einem Grad an Unterstützung unterstützen, der von vollständiger Unterstützung bis zu keiner reichen kann. Der Grad der Roboterunterstützung wird zu Beginn jeder Rehabilitationssitzung basierend auf dem Grad der motorischen Beeinträchtigung des Patienten ausgewählt. Die vom Probanden ausgeführten Bewegungen werden vom Spiel verwendet, um die Leistung des Patienten zu bewerten und ihm Feedback zu seiner Leistung zu geben (z. B. ROM, Anzahl der Bewegungen und Grad der Roboterunterstützung). Die Spiele sind interaktiv und unterhaltsam gestaltet, um das Interesse und die Aufmerksamkeit der Patienten aufrechtzuerhalten. In dieser Studie spielten die Teilnehmer das “Picknick-Spiel”, bei dem der Spieler die Insekten davon abhalten musste, das Handtuch zu erreichen und das Essen zu stehlen (siehe Abbildung 1, Unterseite, für einen Screenshot).
Die Datenerfassung wurde mit einem tragbaren fNIRS-Erfassungssystem mit zwei verschiedenen Dauerstrichoptoden (760 nm und 850 nm), 8 Dual-Tip-LED-Quellen und 8 aktiven Dual-Tip-Detektoren durchgeführt. Die Signale wurden mit einer Abtastrate von 10,17 Hz erfasst. Für die Kalibrierungsoptimierung und Signalaufzeichnung wurde ein Laptop über ein vom fNIRS-System erstelltes Wi-Fi-Netzwerk verwendet.
Eine Kappe wurde verwendet, um die Optoden an den vorgegebenen Stellen zu halten. Die Quellen und Detektoren wurden gemäß dem internationalen EEG-System 10-10 in einer räumlichen Gitterverteilung platziert. Jeder fNIRS-Kanal wurde durch ein Quellen-Detektor-Paar mit Abständen zwischen den Optoden von ca. 30 mm definiert. Die Optoden wurden an den in Abbildung 2 gezeigten Stellen über den zusätzlichen Motor-, Vormotor- und Motorbereichen platziert. Die Gesamtzahl der Kanäle betrug 28, wobei 8 Kurzstreckenkanäle waren, die mit jedem Sender über einen Glasfaseradapter an einen einzigen Detektor gekoppelt waren. Durch den Multiplexing-Aufbau der Hardware ist es möglich, mit nur einem Detektor Kurzstreckeninformationen aus allen Quellen zu erfassen.
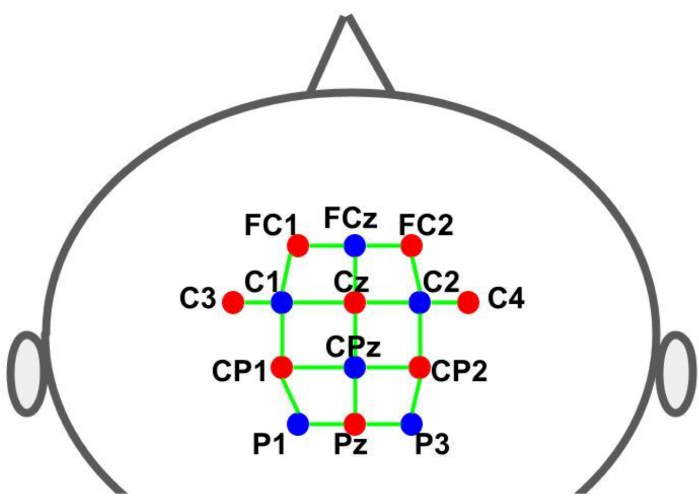
Abbildung 2: Montageaufbau mit dem 10-10 EEG-System. Die Buchstaben und Zahlen geben die Quellen-/Detektorstandorte an. Die roten und blauen Punkte stellen die Quell- bzw. Detektoroptoden dar. Die grünen Linien stellen die fNIRS-Kanäle dar, die aus Quell- und Detektorpaaren bestehen. Bitte klicken Sie hier, um eine größere Version dieser Abbildung anzuzeigen.
Versuchsplanung
Das Experiment wurde unter zwei verschiedenen experimentellen Bedingungen durchgeführt, die sich in der Unterstützung des Roboters für die Bewegungen des Probanden unterschieden. In der ersten Bedingung wurde der Roboter so programmiert, dass er die Bewegungen des Probanden nicht unterstützt, während der Roboter in der zweiten Bedingung die Fuß- und Beinbewegungen des Probanden steuerte (robotergestützte Bewegung).
Jedes Experiment folgte einem Blockdesign-Paradigma mit abwechselnden Zyklen einer motorischen Aufgabe (Spielen des Spiels – 30 s) und Ruhen (30 s), wie in Abbildung 3 dargestellt. Der Beginn und das Ende jeder Phase (Spiel/Spiel oder Pause) wurden dem Probanden visuell über den Computerbildschirm signalisiert. Während der Ruhephase wurde eine Meldung angezeigt, die auf eine Pause hinweist. Jeder Zyklus (Spiel/Spiel + Pause) hatte eine Dauer von 60 s und wurde sechsmal wiederholt, was zu einer Gesamtlaufzeit von 360 s (6 min) führte.
Die Teilnehmer spielten das “Picknick-Spiel”, bei dem es darum ging, Insekten daran zu hindern, das Handtuch zu erreichen und Lebensmittel zu stehlen. Dieses Spiel beinhaltete eine Abfolge von Bewegungen der unteren Gliedmaßen, beginnend mit einem bestimmten Zielpunkt (Ausgangsposition) und erstreckte sich zu einem von drei äußeren Zielen, bevor es zum Heimatziel zurückkehrte. Auf dem Bildschirm wurden die äußeren Ziele visuell als animierte sich bewegende Insekten dargestellt, die die Teilnehmer erreichen und betreten mussten. Es gab drei nach außen gerichtete Ziele, die jeweils zufällig gleich oft präsentiert wurden, zusammen mit einem gemeinsamen Zielpunkt für jede Bewegung. Die Entfernung, die der Fuß benötigte, um von der Heimatscheibe zur Position der äußeren Ziele zurückzulegen, bildete einen Bogen, der etwa 26 cm maß. Die motorische Aufgabe erforderte die Ausführung von Mehrgelenkbewegungen, die die Koordination zwischen Kniebeugung/-streckung, Plantarflexion und Dorsalflexionsbewegungen erforderten.
Die fNIRS-Datenaufzeichnungen wurden mit den visuellen Reizen synchronisiert, die das Spiel dem Probanden durch einen vom Roboter erzeugten Transistor-Transistor-Logik-Impuls (TTL) präsentierte. Zu Beginn jeder Phase (Spiel/Spiel und Ruhe) wurden Impulse erzeugt. Daher wurde die gesamte Zeitsteuerung vom Spiel durchgeführt, das dem Teilnehmer visuelle Hinweise (Ziele) lieferte, um jede Bewegung zu starten, TTL-Signale an das fNIRS-System sendete, um die Gehirnaktivitätsaufzeichnungen zu markieren, und, falls für das Experiment erforderlich, Signale an das Robotersteuerungssystem sendete, um die Bewegungsunterstützung zu initiieren.
