I dati epidemiologici indicano che in tutto il mondo ci sono ~17 milioni di nuovi casi di ictus ogni anno, con un aumento dell’incidenza nei paesi a basso e medio reddito1. Si stima che il numero di nuovi casi salirà a 77 milioni entro il 20302. La compromissione motoria dovuta all’ictus spesso influisce sulla mobilità del paziente e sulla partecipazione alle attività della vita quotidiana, contribuendo a una bassa qualità della vita. La riabilitazione motoria tradizionale comprende la terapia manuale, ma negli ultimi decenni sono stati sviluppati sistemi robotici per la riabilitazione. Questi sistemi sono in grado di fornire una terapia ad alta intensità, dose, quantificabilità, affidabilità, ripetibilità e flessibilità3 e hanno dimostrato un potenziale come trattamenti riabilitativi efficaci per pazienti con ictus sia acuto che cronico 4,5,6. Oltre ad erogare la terapia, i sistemi robotici per la riabilitazione possono essere utilizzati come strumenti di valutazione in quanto possono essere dotati di sensori in grado di misurare i dati cinematici/cinetici del movimento del paziente 7,8. Per la riabilitazione motoria degli arti superiori, tali dati non solo si sono dimostrati utili per valutare il livello di recupero motorio del paziente indotto dalla terapia robotica e sono serviti come strumento supplementare alle valutazioni cliniche tradizionali 9,10, ma hanno anche contribuito a far progredire la comprensione del processo di recupero motorio dall’ictus11, 12 così come il controllo neurale del movimento e l’apprendimento motorio in soggetti sani 3,13,14. Di conseguenza, questi risultati hanno fornito una base per migliorare i trattamenti riabilitativi15.
Negli ultimi due decenni, sono stati proposti molti dispositivi robotici per la neuroriabilitazione degli arti inferiori, che vanno dagli esoscheletri che supportano il peso corporeo del paziente durante la deambulazione (ad esempio, su un tapis roulant, come Lokomat16) ai sistemi robotici stazionari che consentono al paziente di esercitare la caviglia, il ginocchio o il piede senza camminare (come il Rutgers Ankle17, il robot per la riabilitazione della caviglia ad alte prestazioni18 e il robot per la riabilitazione caviglia/piede del Gwangju Institute of Science and Technology (GIST)19) o ortesi attive per il piede che sono esoscheletri azionati indossati dal paziente per camminare fuori terra o su un tapis roulant (come l’ortesi per andatura motorizzata20 e la caviglia MITAnklebot 21). Vedere 22,23,4 per una recensione sui robot per la riabilitazione degli arti inferiori.
I risultati degli studi clinici sui dispositivi robotici per la riabilitazione degli arti inferiori su pazienti colpiti da ictus sono stati incoraggianti e hanno dimostrato che questi sistemi possono migliorare il range di movimento (ROM) delle articolazioni, la forza muscolare o l’andatura, a seconda del dispositivo specifico e del protocollo clinico (vedere 24,25 per una revisione sull’efficacia dei robot degli arti inferiori per la riabilitazione). Mentre è stato postulato che la terapia assistita da robot promuova cambiamenti neuroplastici, che alla fine si traducono in un miglioramento delle capacità motorie26, il modo in cui avviene esattamente il processo di recupero motorio dall’ictus e quali protocolli di allenamento robotico ottimizzano il processo di recupero delle capacità motorie degli arti inferiori, rimangono per lo più poco chiari. In effetti, c’è una significativa e crescente disparità tra il crescente sviluppo di robot per la riabilitazione (sia da parte di ricercatori accademici che di enti commerciali) e la limitata comprensione dei meccanismi neurofisiologici che sono alla base del recupero motorio4. Le misurazioni della cinematica del movimento o delle coppie articolari effettuate con sensori incorporati hanno contribuito a descrivere quantitativamente i cambiamenti comportamentali motori che si verificano quando i pazienti recuperano le capacità motorie degli arti inferiori 27,28,29, colmando parzialmente questa lacuna. Tuttavia, i correlati neurali alla base di tali cambiamenti sono stati meno studiati. Ciò è dovuto a diversi motivi.
L’imaging funzionale cerebrale richiede molto tempo e talvolta è difficile da completare nel contesto degli studi clinici, che spesso richiedono di ridurre al minimo il carico del paziente per massimizzare la probabilità di aderenza del paziente allo studio. Ciò è particolarmente vero per le persone che hanno subito un ictus, dato che l’affaticamento post-ictus e la debolezza muscolare sono spesso osservati30. Inoltre, le modalità di imaging basate su campi magnetici, come la risonanza magnetica funzionale (fMRI), richiedono che sia l’hardware del paziente che quello robotico siano a prova di magnete.
Tra le modalità di imaging non invasive, la spettroscopia funzionale nel vicino infrarosso (fNIRS) è una tecnica di imaging particolarmente adatta per valutare le aree di attivazione cerebrale in soggetti sottoposti a terapia robotica. Analogamente alla fMRI, la fNIRS misura l’ossigenazione/deossigenazione del sangue nel cervello. Tuttavia, a differenza della fMRI, la fNIRS è completamente compatibile con l’hardware robotico ed è spesso portatile, essendo utilizzabile anche al letto del paziente. Inoltre, fNIRS ha un basso costo e una minore sensibilità agli artefatti da movimento 31,32,33.
Nonostante i suoi evidenti vantaggi e l’uso diffuso in molti contesti clinici sin dalla sua prima introduzione alla fine degli anni ’7034, solo pochi studi hanno utilizzato la fNIRS per quantificare l’attivazione cerebrale associata ai movimenti degli arti inferiori e al recupero motorio dell’ictus. Gli studi FNIRS volti a chiarire i meccanismi di controllo neurale del movimento e/o i meccanismi o la valutazione del recupero motorio dall’ictus hanno indagato principalmente movimenti monoarticolari (ad esempio, flessione dorsale, flessione plantare o movimenti di estensione del ginocchio 35,36,37), camminata 38,39,40,41,42,43 o ciclismo44. Vedere45 per una recensione. Allo stesso modo, gli studi fNIRS sulla terapia robot-assistita per l’arto inferiore si sono concentrati principalmente sulla riabilitazione della deambulazione robot-assistita; Vedi46 per una recensione. Alcuni studi si sono concentrati sull’utilizzo di fNIRS come parte di un sistema di interfaccia cervello-computer (BCI) per derivare segnali di controllo per dispositivi robotici47,48; sebbene quest’area di ricerca si basi anche sull’elaborazione dei segnali fNIRS, il suo obiettivo è diverso e principalmente focalizzato sulla decodifica delle intenzioni dei pazienti (ad esempio, pazienti con gravi disabilità motorie).
Lo studio pilota qui presentato fa parte di uno sforzo iniziale per studiare gli effetti di un sistema robotico per la riabilitazione degli arti inferiori. Il robot è in grado di fornire una riabilitazione mirata agli arti inferiori che prevede l’allenamento nei movimenti multiarticolari quotidiani e di fornire una terapia alle singole articolazioni (ad esempio, ginocchio o caviglia) dell’arto inferiore (ad esempio, implementare un programma di riabilitazione dal basso verso l’alto).
Lo studio aveva lo scopo di indagare la fattibilità di un protocollo sperimentale che richiedesse l’acquisizione di dati fNIRS durante l’esecuzione di movimenti di puntamento multiarticolare degli arti inferiori. La durata del periodo di acquisizione dei dati in questo studio, che è stato limitato a 6 minuti, è più breve rispetto ai tipici protocolli fNIRS. Si è trattato di una scelta voluta con l’obiettivo di migliorare la praticità e l’applicabilità clinica di questa ricerca, in particolare nei pazienti con mobilità o forza limitate. Anche l’identificazione dei correlati fNIRS di movimenti multiarticolari così complessi e l’acquisizione di informazioni su come l’attivazione cerebrale è stata modulata dall’assistenza del robot sono stati punti di interesse. A tal fine, sono state condotte due sessioni di esperimenti con gli stessi partecipanti: una senza assistenza robotica e una con assistenza robotica. Infine, è importante sottolineare che questo studio si è concentrato su soggetti sani al fine di stabilire una base per la ricerca futura in termini di fattibilità del protocollo di registrazione e valutazione dell’attivazione cerebrale durante i movimenti mirati dalla terapia robotica.
Apparecchio
Per condurre i nostri esperimenti è stato utilizzato un robot portatile progettato per la riabilitazione degli arti inferiori (vedi Figura 1). Il robot ha un’area di lavoro raggiungibile in 3D ed è compatto e leggero, con un peso di circa 35 libbre, il che lo rende facile da trasportare e installare.
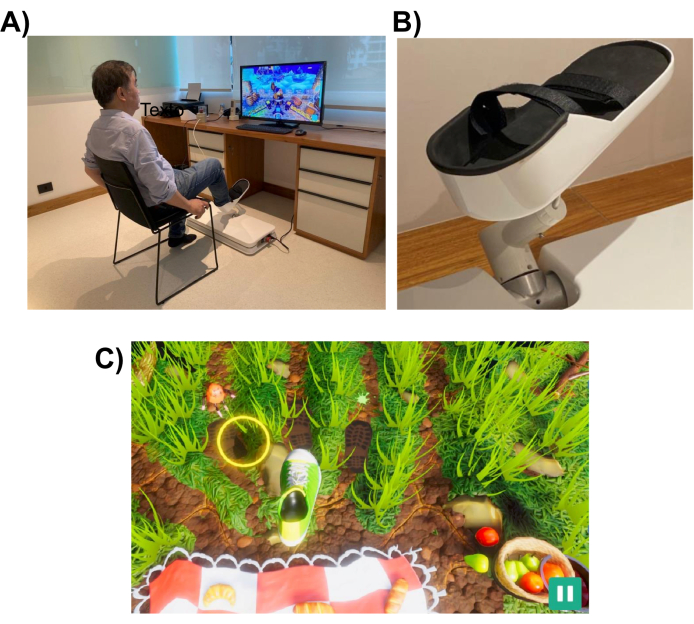
Figura 1: Configurazione sperimentale. (A) Il sistema robotico (installato sul pavimento) progettato per l’arto inferiore. Un volontario viene mostrato mentre utilizza l’interfaccia con il piede destro. (B) Struttura di supporto per il piede del soggetto che consente il fissaggio al sistema robotico. (C) Uno screenshot del gioco Picnic. L’obiettivo del gioco è muovere il piede (scarpa verde e bianca) verso il bersaglio (cerchio giallo). Fare clic qui per visualizzare una versione più grande di questa figura.
Il sistema robotico è progettato per assistere il paziente nell’esecuzione di movimenti degli arti inferiori simili a quelli eseguiti nelle attività quotidiane, come puntare o calciare. Utilizza giochi interattivi di realtà virtuale, che vengono visualizzati sul monitor di un computer o su uno schermo televisivo posto di fronte al dispositivo robotico (vedi Figura 1). L’effettore dell’estremità del robot è collegato all’arto inferiore del paziente (ad esempio, la caviglia) e la sua posizione è mappata sulla posizione di un cursore sullo schermo. Un gioco tipico mostra i bersagli di movimento del paziente (ad esempio, l’oggetto da indicare o dove calciare la palla).
Per completare l’attività di movimento, il robot può assistere il paziente con un livello di assistenza che può variare da assistenza completa a nessuna. Il livello di assistenza robotica viene scelto all’inizio di ogni seduta riabilitativa in base al livello di compromissione motoria del paziente. I movimenti eseguiti dal soggetto vengono utilizzati dal gioco per valutare le prestazioni del paziente e fornirgli un feedback sulle sue prestazioni (ad esempio, ROM, numero di movimenti e livello di assistenza robotica). I giochi sono progettati per essere interattivi e divertenti per sostenere l’interesse e l’attenzione del paziente. In questo studio, i partecipanti hanno giocato al “gioco del picnic”, in cui il giocatore doveva impedire agli insetti di raggiungere l’asciugamano e rubare il cibo (vedi Figura 1, pannello in basso, per uno screenshot).
L’acquisizione dei dati è stata eseguita con un sistema di acquisizione fNIRS portatile con due diversi optodi a onda continua (760 nm e 850 nm), 8 sorgenti LED a doppia punta e 8 rivelatori attivi a doppia punta. I segnali sono stati acquisiti utilizzando una frequenza di campionamento di 10,17 Hz. Per l’ottimizzazione della calibrazione e la registrazione del segnale è stato utilizzato un computer portatile utilizzando una rete Wi-Fi creata dal sistema fNIRS.
Un cappuccio è stato utilizzato per tenere gli optodi nelle posizioni predeterminate. Le sorgenti e i rivelatori sono stati collocati secondo il sistema EEG internazionale 10-10 in una distribuzione spaziale a griglia. Ogni canale fNIRS è stato definito da una coppia sorgente-rivelatore con distanze inter-optodate di circa 30 mm. Gli optodi sono stati posizionati sopra le aree del motore supplementare, del premotore e del motore nelle posizioni mostrate nella Figura 2. Il numero totale di canali era di 28, dove 8 erano canali a breve distanza che sono stati accoppiati a ciascuna sorgente utilizzando un adattatore in fibra ottica per un singolo rivelatore. Data la configurazione di multiplexing dell’hardware, è possibile acquisire informazioni a breve distanza da tutte le sorgenti utilizzando un solo rivelatore.
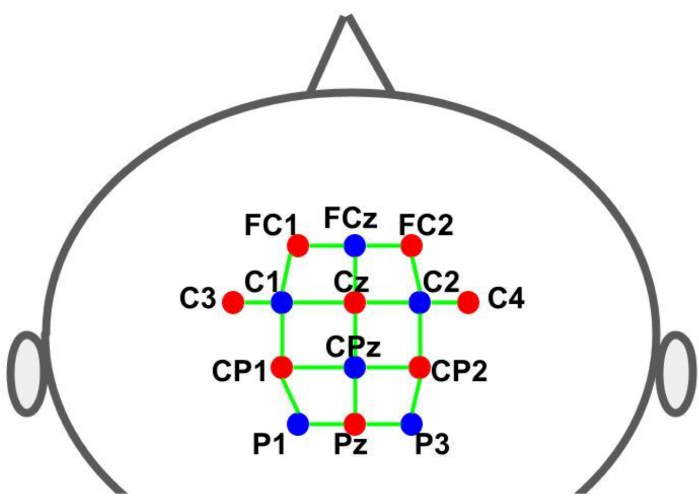
Figura 2: Layout di montaggio utilizzando il sistema EEG 10-10. Le lettere e i numeri indicano le posizioni della sorgente/rivelatore. I punti rossi e blu rappresentano rispettivamente gli optodi della sorgente e del rivelatore. Le linee verdi rappresentano i canali fNIRS costituiti da coppie sorgente e rivelatore. Fare clic qui per visualizzare una versione più grande di questa figura.
Disegno sperimentale
L’esperimento è stato condotto in due distinte condizioni sperimentali, diverse per il livello di assistenza fornito dal robot ai movimenti del soggetto. Nella prima condizione, il robot è stato programmato per non fornire alcuna assistenza ai movimenti del soggetto, mentre nella seconda condizione, il robot ha controllato i movimenti del piede e delle gambe del soggetto (movimento assistito dal robot).
Ogni esperimento ha seguito un paradigma di progettazione a blocchi che prevedeva cicli alternati di un compito motorio (giocare – 30 secondi) e riposo (30 secondi), come illustrato nella Figura 3. L’inizio e la conclusione di ogni fase (gioco/gioco o riposo) sono stati segnalati visivamente al soggetto attraverso lo schermo del computer. Durante la fase di riposo, è stato visualizzato un messaggio che indicava una pausa. Ogni ciclo (gioco/gioco + riposo) ha avuto una durata di 60 s ed è stato ripetuto sei volte, per un tempo di esecuzione totale di 360 s (6 min).
I partecipanti hanno giocato al “gioco del picnic”, in cui l’obiettivo era quello di impedire agli insetti di raggiungere l’asciugamano e rubare il cibo. Questo gioco prevedeva una sequenza di movimenti degli arti inferiori, partendo da un bersaglio di partenza designato (posizione iniziale) ed estendendosi verso uno dei tre bersagli esterni prima di tornare al bersaglio di partenza. Sullo schermo, i bersagli esterni erano rappresentati visivamente come insetti animati in movimento, che i partecipanti dovevano raggiungere e calpestare. C’erano tre bersagli esterni, ognuno presentato casualmente un numero uguale di volte, insieme a un bersaglio comune per ogni movimento. La distanza che il piede doveva percorrere dal bersaglio principale alla posizione dei bersagli esterni formava un arco, che misurava circa 26 cm. Il compito motorio richiedeva l’esecuzione di movimenti multiarticolari, che richiedevano la coordinazione tra i movimenti di flessione/estensione del ginocchio, flessione plantare e flessione dorsale.
Le registrazioni dei dati fNIRS sono state sincronizzate con gli stimoli visivi presentati dal gioco al soggetto attraverso un impulso transistor-transistor-logic (TTL) generato dal robot. Gli impulsi sono stati generati all’inizio di ogni fase (gioco/gioco e riposo). Pertanto, tutto il controllo dei tempi è stato eseguito dal gioco, che ha fornito segnali visivi (bersagli) al partecipante per iniziare ogni movimento, ha inviato segnali TTL al sistema fNIRS per contrassegnare le registrazioni dell’attività cerebrale e, se richiesto dall’esperimento, ha inviato segnali al sistema di controllo del robot per avviare l’assistenza al movimento.
