疫学データによると、世界中で毎年1,700~1,700万人の脳卒中患者が新たに発生しており、低・中所得国で発生率が増加しています1。新規感染者数は2030年までに7,700万人に増加すると推定されています2。脳卒中による運動障害は、患者の可動性や日常生活活動への参加に影響を与えることが多く、生活の質の低下の一因となります。従来の運動リハビリテーションには手技療法が含まれますが、過去数十年の間にリハビリテーション用のロボットシステムが開発されてきました。これらのシステムは、高強度、線量、定量化可能性、信頼性、再現性、柔軟性3で治療を提供することができ、急性および慢性脳卒中患者の両方に効果的なリハビリテーション治療としての可能性を示しています4,5,6。リハビリテーション用のロボットシステムは、治療を提供するだけでなく、患者の運動学的/運動学的データを測定できるセンサーを装備できるため、評価ツールとして使用することができます7,8。上肢の運動リハビリテーションでは、このようなデータは、ロボット療法によって誘発される患者の運動回復のレベルを評価するのに有用であることが証明され、従来の臨床評価9,10の補足ツールとして役立つだけでなく、脳卒中からの運動回復プロセスの理解を深めることにも貢献しています11。12、および健康な被験者における運動と運動学習の神経制御3,13,14。その結果、これらの知見はリハビリテーション治療を強化するための基盤を提供した15。
過去20年間にわたり、下肢のニューロリハビリテーションのための多くのロボット装置が提案され、歩行中に患者の体重を支える外骨格(例えば、ロコマット16のようなトレッドミルの上)から、患者が歩かずに足首、膝、または足を運動できる固定ロボットシステム(ラトガースアンクル17など、 高性能足関節リハビリテーションロボット18、および光州科学技術院(GIST)の足首/足リハビリテーションロボット19)、または患者が地上またはトレッドミルの上を歩くために装着する作動式外骨格であるアクティブフット装具(電動歩行装具20やMITアンクルボット21など)。下肢のリハビリテーションのためのロボットのレビューについては、22,23,4を参照してください。
脳卒中患者の下肢リハビリテーションのためのロボットデバイスの臨床試験の結果は有望であり、これらのシステムは、特定のデバイスと臨床プロトコルに応じて、関節の可動域(ROM)、筋力、または歩行を改善する可能性があることが示されています(リハビリテーションのための下肢ロボットの有効性に関するレビューについては、24,25を参照してください)。ロボット支援療法は神経可塑性の変化を促進し、最終的には運動能力の改善をもたらすと仮定されているが26、脳卒中からの運動回復のプロセスが正確にどのように起こるのか、そしてどのロボットトレーニングプロトコルが下肢の運動能力の回復プロセスを最適化するのかは、ほとんど不明のままである。実際、リハビリテーションロボットの開発が進んでいること(学術研究者や営利団体によるもの)と、運動回復の根底にある神経生理学的メカニズムの理解が限られていることとの間には、大きな格差が広がっています4。埋め込まれたセンサーで取得された運動学または関節トルクの測定は、患者が下肢の運動能力を回復するにつれて発生する運動行動の変化を定量的に記述することに貢献しています27,28,29、このギャップを部分的に埋めます。しかし、このような変化の根底にある神経相関はあまり研究されていません。これにはいくつかの理由があります。
脳機能イメージングは時間がかかり、臨床試験の文脈では完了するのが難しい場合があり、多くの場合、患者の負担を最小限に抑えて、患者が研究にアドヒアランスする可能性を最大限に高める必要があります。これは、脳卒中後の倦怠感や筋力低下が頻繁に観察されることを考えると、脳卒中を患った人に特に当てはまります30。また、機能的磁気共鳴画像法(fMRI)など、磁場に基づくイメージングモダリティでは、患者とロボットの両方のハードウェアが磁石で安全であることが求められます。
非侵襲的イメージングモダリティの中で、機能的近赤外分光法(fNIRS)は、ロボット療法を受けている被験者の脳活性化領域を評価するのに特に適したイメージング技術です。fMRIと同様に、fNIRSは脳内の血液酸素化/脱酸素化を測定します。しかし、fMRIとは異なり、fNIRSはロボットハードウェアと完全に互換性があり、多くの場合、ポータブルであり、ベッドサイドでも使用できます。また、fNIRSは低コストであり、モーションアーチファクトに対する感度が低い31,32,33。
70年代後半に初めて導入されて以来、多くの臨床現場でfNIRSの明らかな利点と広く使用されているにもかかわらず34、下肢運動と脳卒中運動回復に関連する脳の活性化を定量化するためにfNIRSを使用した研究はごくわずかです。運動の神経制御のメカニズムの解明や脳卒中からの運動回復のメカニズムや評価を目的としたFNIRS研究は、主に単関節運動(背屈、足底屈曲、膝伸展運動35,36,37)、歩行38,39,40,41,42,43、サイクリング44を調査してきた。レビューについては、45を参照してください。同様に、下肢のロボット支援療法に関するfNIRSの研究は、主にロボット支援歩行リハビリテーションに焦点を当てています。レビューについては、46を参照してください。いくつかの研究は、ロボットデバイスの制御信号を導き出すために、ブレイン・コンピュータ・インターフェース(BCI)システムの一部としてfNIRSを使用することに焦点を当てています47,48。この研究分野もfNIRS信号の処理に依存していますが、その目標は異なり、主に患者の意図(重度の運動障害のある患者など)を解読することに焦点を当てています。
本稿で紹介するパイロット研究は、下肢のリハビリテーションにおけるロボットシステムの効果を調査するための初期取り組みの一環である。このロボットは、日常的な多関節運動のトレーニングを含むターゲット指向の下肢リハビリテーションを提供するだけでなく、下肢の単一関節(膝や足首など)に治療を提供する(つまり、ボトムアップのリハビリテーションプログラムを実施する)ことができます。
この研究は、下肢の多関節ポインティング運動の実行中にfNIRSデータの取得を必要とする実験プロトコルの実現可能性を調査することを目的としていました。本研究におけるデータ取得期間は6分に制限されており、一般的なfNIRSプロトコルよりも短くなっています。これは、特に可動性や筋力が制限されている患者において、この研究の実用性と臨床的応用性を高めることを目的として行われた意図的な選択でした。また、このような複雑な多関節運動のfNIRS相関を特定し、ロボットの支援によって脳の活性化がどのように調節されているかについての洞察を得ることも興味深いポイントでした。この目的のために、同じ参加者で、ロボット支援なしとロボット支援ありの2つの実験セッションを実施しました。最後に、この研究は、ロボット療法の対象となる運動中の脳の活性化の記録プロトコルの実現可能性と評価の観点から、将来の研究の基礎を確立するために、健康な被験者に焦点を当てたことに注意することが重要です。
装置
下肢のリハビリテーションを行うように設計されたポータブルロボット( 図1参照)を使用して実験を行いました。ロボットは3Dで到達可能なワークスペースを備えており、コンパクトで軽量で、重量は約35ポンドであるため、持ち運びや設置が簡単です。
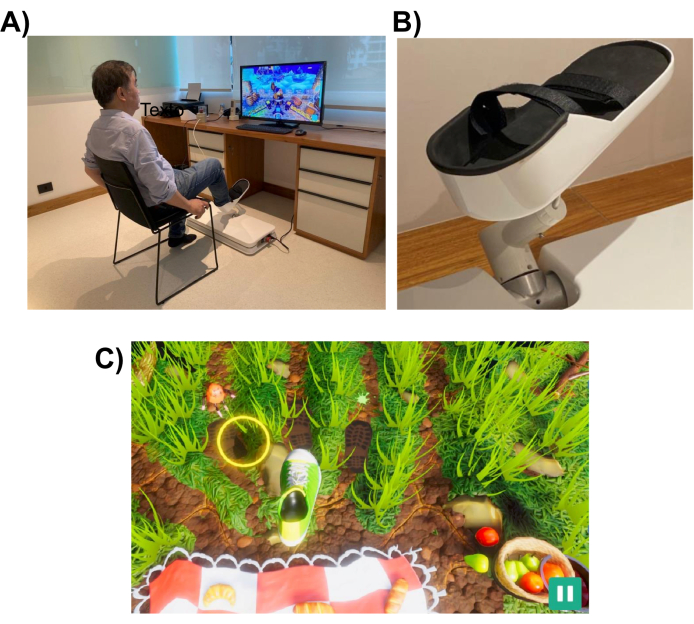
図1:実験装置。 (A)下肢用に設計されたロボットシステム(床に設置)。ボランティアが右足でインターフェースを利用している様子が描かれています。(B)ロボットシステムへの取り付けを可能にする被験者の足の支持構造。(C)ピクニックゲームのスクリーンショット。ゲームの目的は、足(緑と白の靴)をターゲット(黄色の円)に移動することです。 この図の拡大版をご覧になるには、ここをクリックしてください。
このロボットシステムは、指差しや蹴りなどの日常的な作業と同様の下肢の動きを患者が行うのを支援するように設計されています。インタラクティブなバーチャルリアリティゲームを使用しており、ロボットデバイスの前に設置されたコンピューターモニターまたはテレビ画面に表示されます( 図1を参照)。ロボットエンドエフェクタは患者の下肢(足首など)に取り付けられ、その位置は画面上のカーソルの位置にマッピングされます。典型的なゲームは、患者の運動ターゲット(例えば、指し示す物体やボールを蹴る場所)を示す。
移動タスクを完了するために、ロボットは、完全な支援からなしまでの範囲のレベルの支援で患者を支援する場合があります。ロボット支援のレベルは、患者の運動障害のレベルに基づいて、各リハビリテーションセッションの開始時に選択されます。被験者が行った動きは、患者のパフォーマンスをスコアリングし、パフォーマンスに関するフィードバック(ROM、動きの数、ロボット支援のレベルなど)を提供するためにゲームによって使用されます。ゲームは、患者の興味と注意を維持するために、インタラクティブで楽しいように設計されています。この研究では、参加者は「ピクニックゲーム」をプレイし、プレイヤーは昆虫がタオルに到達して食べ物を盗むのを阻止しなければなりませんでした(スクリーンショットは 図1の下部パネルを参照)。
データ取得は、2つの異なる連続波オプトード(760 nmおよび850 nm)、8つのデュアルチップLED光源、および8つのデュアルチップアクティブ検出器を備えたポータブルfNIRS取得システムを使用して実行しました。信号は、10.17Hzのサンプリングレートを使用して取得されました。ラップトップは、fNIRSシステムによって作成されたWi-Fiネットワークを使用して、キャリブレーションの最適化と信号記録に使用されました。
キャップを使用して、オプトードを所定の位置に保持しました。線源と検出器は、10-10 国際脳波システムに従ってグリッド空間分布に配置されました。各fNIRSチャネルは、オプトード間距離が約30 mmのソース-検出器ペアによって定義されました。オプトードは、 図2に示す位置の補助モーター、プリモーター、およびモーター領域の上に配置されました。チャンネルの総数は28で、そのうち8つは短距離チャンネルで、光ファイバーアダプタを使用して1つの検出器に結合されていました。ハードウェアの多重化設定により、1つの検出器のみを使用して、すべてのソースから短距離情報を取得することができます。
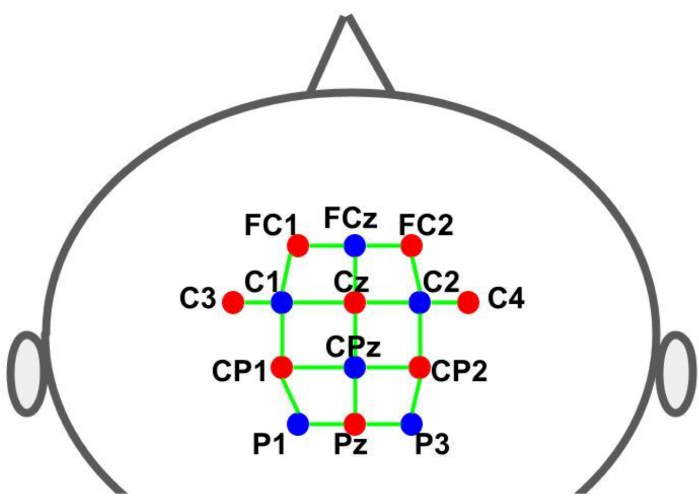
図2:10-10脳波システムを使用したモンタージュレイアウト。 文字と数字は、ソース/検出器の位置を示します。赤と青のドットは、それぞれ光源と検出器のオプトードを表します。緑色の線は、光源と検出器のペアで構成されるfNIRSチャンネルを表しています。 この図の拡大版をご覧になるには、ここをクリックしてください。
実験計画法
この実験は、被験者の動きに対するロボットの支援レベルが異なる2つの異なる実験条件で行われました。第1の条件では、ロボットは被験者の動きを補助しないようにプログラムされ、第2の条件では、ロボットは被験者の足と脚の動きを制御する(ロボット支援運動)ようにプログラムされました。
各実験は、 図3に示すように、運動タスク(ゲームをプレイする-30秒)と休息(30秒)の交互のサイクルを含むブロック設計パラダイムに従っていました。各フェーズ(プレイ/ゲームまたは休憩)の開始と終了は、コンピューター画面を介して被験者に視覚的に信号されました。休止フェーズ中に、一時停止を示すメッセージが表示されました。各サイクル (プレイ/ゲーム + 休憩) の持続時間は 60 秒で、6 回繰り返されたため、合計実行時間は 360 秒 (6 分) になりました。
参加者は「ピクニックゲーム」を行い、昆虫がタオルに手を伸ばして食べ物を盗むのを防ぐことを目的としました。このゲームでは、指定されたホームターゲット(初期位置)から始まり、ホームターゲットに戻る前に、3つの外側のターゲットのうちの1つに向かって伸びるという、一連の下肢の動きが含まれていました。画面上では、外側のターゲットが動く昆虫のアニメーションとして視覚的に表現され、参加者は手を伸ばして踏まなければなりませんでした。外側に到達するターゲットは3つあり、それぞれが同じ回数ランダムに提示され、すべての動きに共通のホームターゲットがいました。ホームターゲットから外側のターゲットの位置まで足が移動するのに必要な距離は、約26cmの円弧を形成しました。運動課題は、膝の屈伸、足底屈曲、背屈運動の協調を必要とする多関節運動の実行を必要としました。
fNIRSのデータ記録は、ロボットが生成したトランジスタ-トランジスタ-ロジック(TTL)パルスを介して、ゲームが被験者に提示する視覚刺激と同期しました。パルスは、各フェーズ(プレイ/ゲームおよび休息)の開始時に生成されました。したがって、すべてのタイミング制御はゲームによって行われ、参加者に視覚的な手がかり(ターゲット)を提供して各動きを開始し、TTL信号をfNIRSシステムに送信して脳活動の記録をマークし、実験で必要に応じてロボット制御システムに信号を送信して動作支援を開始します。
