Epidemiologiske data indikerer at det på verdensbasis er ~ 17 millioner nye tilfeller av hjerneslag hvert år, med en økning i forekomst i lav- og mellominntektsland1. Antall nye tilfeller anslås å øke til 77 millioner innen 20302. Motorisk svekkelse på grunn av hjerneslag påvirker ofte pasientens mobilitet og deltakelse i dagliglivets aktiviteter, noe som bidrar til lav livskvalitet. Tradisjonell motorrehabilitering inkluderer manuell terapi, men i løpet av de siste tiårene har robotsystemer for rehabilitering blitt utviklet. Disse systemene kan levere behandling med høy intensitet, dose, kvantifiserbarhet, pålitelighet, repeterbarhet og fleksibilitet3 og har vist potensial som effektive rehabiliteringsbehandlinger for både akutte og kroniske slagpasienter 4,5,6. I tillegg til å levere terapi, kan robotsystemer for rehabilitering brukes som evalueringsverktøy, da de kan utstyres med sensorer som kan måle pasientbevegelser kinematiske/kinetiske data 7,8. For motorrehabilitering i øvre ekstremiteter har slike data ikke bare vist seg å være nyttige for å vurdere nivået av pasientens motoriske utvinning fremkalt av robotbehandling og tjent som et supplerende verktøy til tradisjonelle kliniske vurderinger 9,10, men det har også bidratt til å fremme forståelsen av prosessen med motorisk gjenoppretting fra slag11, 12 samt nevral kontroll av bevegelse og motorisk læring hos friske forsøkspersoner 3,13,14. Som et resultat har disse funnene gitt grunnlag for å styrke rehabiliteringsbehandlinger15.
I løpet av de siste to tiårene har mange robotinnretninger for nevrorehabilitering i underekstremitetene blitt foreslått, alt fra eksoskjeletter som støtter pasientens kroppsvekt under gange (f.eks. Over tredemølle, som Lokomat16) til stasjonære robotsystemer som tillater pasienten å trene ankelen, kneet eller foten uten å gå (som Rutgers Ankle17, High-Performance Ankel Rehabilitation Robot18, og Gwangju Institute of Science and Technology (GIST) ankel / fotrehabiliteringsrobot19) eller aktive fotortoser som er aktiverte eksoskjeletter som bæres av pasienten for å gå over bakken eller over en tredemølle (for eksempel Powered Gait Orthosis20 og MIT Anklebot21). Se 22,23,4 for en gjennomgang av roboter for rehabilitering av underekstremiteter.
Resultater av kliniske studier av robotinnretninger for rehabilitering av underekstremiteter på slagpasienter har vært oppmuntrende og har vist at disse systemene kan forbedre leddenes bevegelsesområde (ROM), muskelstyrke eller gange, avhengig av den spesifikke enheten og klinisk protokoll (se 24,25 for en gjennomgang av effekten av underekstremitetsroboter for rehabilitering). Mens det har blitt postulert at robotassistert terapi fremmer nevroplastiske forandringer, noe som til slutt resulterer i forbedrede motoriske evner26, hvordan prosessen med motorisk gjenoppretting fra hjerneslag nøyaktig oppstår og hvilke robottreningsprotokoller optimaliserer prosessen med gjenoppretting av motoriske evner i underekstremitetene, forblir for det meste uklart. Faktisk er det en betydelig, økende forskjell mellom den økende utviklingen av rehabiliteringsroboter (enten av akademiske forskere eller kommersielle enheter) og den begrensede forståelsen av de nevrofysiologiske mekanismene som ligger til grunn for motorisk gjenoppretting4. Målinger av bevegelseskinmatikk eller leddmomenter tatt med innebygde sensorer har bidratt til kvantitativt å beskrive motoriske atferdsendringer som oppstår når pasienter gjenoppretter motoriske evneri underekstremitetene 27,28,29, og delvis fyller dette gapet. Imidlertid har de nevrale korrelatene som ligger til grunn for slike endringer blitt mindre undersøkt. Dette skyldes flere grunner.
Hjernefunksjonell bildebehandling er tidkrevende og noen ganger vanskelig å fullføre i sammenheng med kliniske studier, som ofte krever å holde pasientbyrden minimal for å maksimere sannsynligheten for pasienttilslutning til studien. Dette gjelder spesielt for personer som har hatt et slag, gitt det faktum at tretthet etter slag og muskelsvakhet ofte observeres30. Også bildebehandlingsmodaliteter som er basert på magnetfelt, for eksempel funksjonell magnetisk resonansavbildning (fMRI), krever at både pasient- og robotmaskinvare er magnetsikker.
Blant ikke-invasive bildebehandlingsmodaliteter er funksjonell nær-infrarød spektroskopi (fNIRS) en avbildningsteknikk spesielt egnet for å vurdere områder av hjerneaktivering hos personer som gjennomgår robotbehandling. På samme måte som fMRI måler fNIRS oksygenering/deoksygenering i blodet i hjernen. Imidlertid, i motsetning til fMRI, er fNIRS fullt kompatibel med robotmaskinvare, og den er ofte bærbar, selv om den kan brukes ved sengen. Dessuten har fNIRS lave kostnader og mindre følsomhet for bevegelsesartefakter 31,32,33.
Til tross for sine klare fordeler og utbredt bruk i mange kliniske innstillinger siden den første introduksjonen på slutten av 70-tallet34, har bare noen få studier brukt fNIRS til å kvantifisere hjerneaktivering assosiert med bevegelser i underekstremitetene og slagmotorisk gjenoppretting. FNIRS-studier rettet mot å belyse mekanismer for nevral kontroll av bevegelse og / eller mekanismer eller evaluering av motorisk utvinning fra hjerneslag har for det meste undersøkt enkeltleddsbevegelser (f.eks. Dorsifleksjon, plantarfleksjon eller kneekstensjonsbevegelser35,36,37), gange 38,39,40,41,42,43 eller sykling44. Se45 for en gjennomgang. Tilsvarende har fNIRS-studier på robotassistert terapi for underekstremiteten hovedsakelig fokusert på robotassistert gangrehabilitering; Se46 for en gjennomgang. Noen få studier har fokusert på å bruke fNIRS som en del av et Brain-Computer Interface (BCI) -system for å utlede kontrollsignaler for robotenheter47,48; Selv om dette forskningsområdet også er avhengig av behandling av fNIRS-signaler, er målet annerledes og hovedsakelig fokusert på å dekode pasientens intensjoner (f.eks. Pasienter med alvorlige motoriske funksjonshemninger).
Pilotstudien som presenteres her, er en del av en innledende innsats for å undersøke effekten av et robotsystem for rehabilitering av underekstremiteter. Roboten kan levere målorientert rehabilitering av underekstremiteter som involverer trening i hverdagslige flerleddsbevegelser, samt levere terapi til enkeltledd (f.eks. kne eller ankel) i underekstremiteten (dvs. implementere et rehabiliteringsprogram nedenfra og opp).
Studien hadde som mål å undersøke muligheten for en eksperimentell protokoll som krevde oppkjøp av fNIRS-data under utførelsen av pekebevegelser i underekstremitetene. Varigheten av datainnsamlingsperioden i denne studien, som var begrenset til 6 minutter, er kortere enn typiske fNIRS-protokoller. Dette var et bevisst valg gjort med sikte på å forbedre den praktiske og kliniske anvendeligheten av denne forskningen, spesielt hos pasienter med begrenset mobilitet eller styrke. Identifisering av fNIRS korrelater av slike komplekse flerleddsbevegelser og innsikt i hvordan hjerneaktivering ble modulert av robotassistanse var også interessante punkter. For dette formålet ble det gjennomført to økter med eksperimenter med de samme deltakerne: en uten robotassistanse og en med robotassistanse. Til slutt er det viktig å merke seg at denne studien fokuserte på friske personer for å etablere et grunnlag for fremtidig forskning når det gjelder registrering av protokollgjennomførbarhet og evaluering av hjerneaktivering under bevegelser målrettet av robotterapi.
Apparat
En bærbar robot designet for å levere rehabilitering av underekstremiteter (se figur 1) ble brukt til å utføre våre eksperimenter. Roboten har et 3D-tilgjengelig arbeidsområde og er kompakt og lett, veier omtrent 35 lb., noe som gjør det enkelt å transportere og installere.
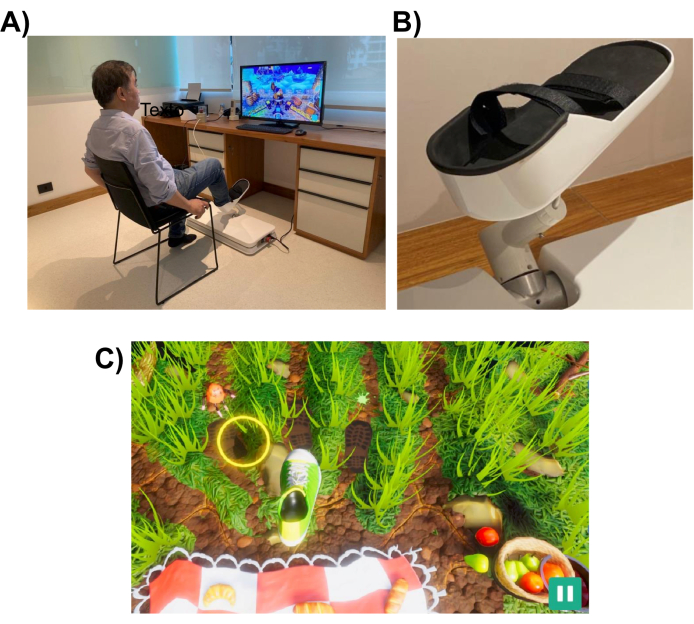
Figur 1: Eksperimentelt oppsett. (A) Robotsystemet (installert på gulvet) designet for underekstremiteten. En frivillig vises ved hjelp av grensesnittet med høyre fot. (B) Støttestruktur for forsøkspersonens fot som muliggjør festing til robotsystemet. (C) Et skjermbilde av piknikspillet. Målet med spillet er å flytte foten (grønn og hvit sko) til målet (gul sirkel). Klikk her for å se en større versjon av denne figuren.
Robotsystemet er designet for å hjelpe en pasient med å utføre bevegelser i underekstremitetene som ligner de som utføres i hverdagslige oppgaver, for eksempel å peke eller sparke. Den bruker interaktive virtuelle virkelighetsspill, som vises på en dataskjerm eller en TV-skjerm plassert foran robotenheten (se figur 1). Robotendens effektor er festet til pasientens underekstremitet (f.eks. ankel), og posisjonen er kartlagt til posisjonen til en markør på skjermen. Et typisk spill viser pasientens bevegelsesmål (f.eks. objektet å peke på eller hvor du skal sparke ballen).
For å fullføre bevegelsesoppgaven kan roboten hjelpe pasienten med et nivå av assistanse som kan variere fra full assistanse til ingen. Nivået på robotassistanse velges i begynnelsen av hver rehabiliteringsøkt basert på pasientens grad av motorisk funksjonsnedsettelse. Bevegelsene som utføres av motivet, brukes av spillet til å score pasientens ytelse og gi dem tilbakemelding på deres ytelse (f.eks. ROM, antall bevegelser og nivå av robothjelp). Spillene er designet for å være interaktive og underholdende for å opprettholde pasientens interesse og oppmerksomhet. I denne studien spilte deltakerne “Picnic-spillet”, der spilleren måtte stoppe insektene fra å nå håndkleet og stjele maten (se figur 1, nederste panel, for et skjermbilde).
Datainnsamlingen ble utført med et bærbart fNIRS-innsamlingssystem med to forskjellige kontinuerlige bølgeoptoder (760 nm og 850 nm), 8 dual-tip LED-kilder og 8 dual-tip aktive detektorer. Signalene ble samlet inn ved hjelp av en samplingsfrekvens på 10,17 Hz. En bærbar PC ble brukt til kalibreringsoptimalisering og signalopptak ved hjelp av et Wi-Fi-nettverk opprettet av fNIRS-systemet.
En hette ble brukt til å holde optodene på de forhåndsbestemte stedene. Kildene og detektorene ble plassert i henhold til det 10-10 internasjonale EEG-systemet i en rutenettsromlig fordeling. Hver fNIRS-kanal ble definert av et kildedetektorpar med interoptodeavstander på ca. 30 mm. Optodene ble plassert over de supplerende motor-, premotor- og motorområdene på stedene vist i figur 2. Totalt antall kanaler var 28, hvor 8 var kortdistansekanaler som ble koblet til hver kilde ved hjelp av en fiberoptikkadapter til en enkelt detektor. Gitt maskinvarens multipleksingsoppsett, er det mulig å skaffe kortdistanseinformasjon fra alle kilder ved hjelp av bare en detektor.
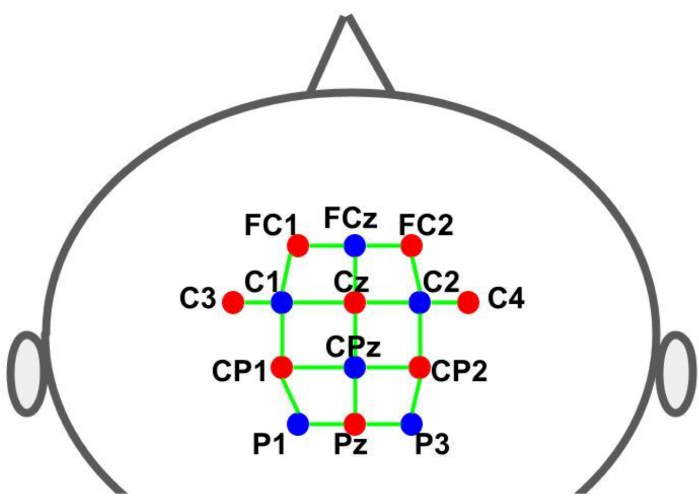
Figur 2: Montasjeoppsett med 10-10 EEG-systemet. Bokstavene og tallene angir kilde-/detektorplasseringene. De røde og blå prikkene representerer henholdsvis kilde- og detektoroptodene. De grønne linjene representerer fNIRS-kanalene som består av kilde- og detektorpar. Klikk her for å se en større versjon av denne figuren.
Eksperimentelt design
Eksperimentet ble utført under to forskjellige eksperimentelle forhold, forskjellig i nivået av assistanse fra roboten for fagets bevegelser. I den første tilstanden var roboten programmert til ikke å gi noen hjelp til fagets bevegelser, mens i den andre tilstanden styrte roboten motivets fot- og benbevegelser (robotassistert bevegelse).
Hvert eksperiment fulgte et blokkdesignparadigme som involverte vekslende sykluser av en motoroppgave (å spille spillet – 30 s) og hvile (30 s), som illustrert i figur 3. Starten og avslutningen av hver fase (spill / spill eller hvile) ble visuelt signalisert til motivet gjennom dataskjermen. I hvilefasen ble det vist en melding som indikerte en pause. Hver syklus (lek/spill + hvile) hadde en varighet på 60 s og ble gjentatt seks ganger, noe som resulterte i en total kjøretid på 360 s (6 min).
Deltakerne spilte “Picnic game”, hvor målet var å hindre insekter i å nå håndkleet og stjele mat. Denne kampen involverte en sekvens av bevegelser i underekstremitetene, som startet fra et utpekt hjemmemål (startposisjon) og strakte seg mot ett av tre ytre mål før det returnerte til hjemmemålet. På skjermen var de ytre målene visuelt representert som animerte bevegelige insekter, som deltakerne måtte nå og gå på. Det var tre ytre mål, hvert tilfeldig presentert like mange ganger, sammen med et felles hjemmemål for hver bevegelse. Avstanden som foten trengte for å reise fra hjemmemålet til posisjonen til de ytre målene dannet en bue, omtrent 26 cm. Den motoriske oppgaven krevde utførelse av flerleddsbevegelser, krevende koordinering mellom knefleksjon / ekstensjon, plantarfleksjon og dorsifleksjonsbevegelser.
FNIRS-dataopptakene ble synkronisert med de visuelle stimuli presentert av spillet til motivet gjennom en transistor-transistor-logikk (TTL) puls generert av roboten. Pulser ble generert i begynnelsen av hver fase (lek/spill og hvile). Dermed ble all timingkontroll utført av spillet, som ga visuelle signaler (mål) til deltakeren for å starte hver bevegelse, sendte TTL-signaler til fNIRS-systemet for å markere hjerneaktivitetsopptakene, og, hvis eksperimentet krevde det, sendte signaler til robotstyringssystemet for å initiere bevegelseshjelp.
