Les impacts de gouttes liquides sur les surfaces sont d’un grand intérêt à la fois pour la compréhension des phénomènes fondamentaux1 et pour les processus industriels2. Les impacts des gouttes ont été étudiés pendant plus de 100 ans3, mais de nombreux aspects doivent encore faire l’objet d’une enquête approfondie. La photographie haute vitesse est presque universellement utilisée pour des études sur les impacts de chute4, car elle fournit des données riches et accessibles qui permettent de faire des mesures analytiques avec une bonne résolution du temps. Les résultats d’un impact de chute sur une surface solide5,6,7 vont de simple dépôt à éclaboussures8. Les impacts sur les surfaces superhydrophobes sont souvent étudiés car ils peuvent générer des résultats particulièrement intéressants, y compris la chute rebondissant9,10,11,12. Le protocole décrit ici a été développé pour étudier les impacts de la goutte d’eau sur les surfaces polymères avec des motifs micro-échelle, et en particulier l’influence du modèle sur les résultats d’impact de chute13,14.
Les résultats d’une expérience d’impact de chute peuvent être affectés par un large éventail de variables possibles. La taille et la vitesse de la baisse peuvent varier, ainsi que les propriétés fluides telles que la densité, la tension de surface et la viscosité. La baisse peut être soit newtonienne15 ou non-Newtonian16. Une grande variété de surfaces d’impact a été étudiée, y compris liquide7,17, solide18, et élastique19 surfaces. Diverses configurations expérimentales possibles ont été décrites précédemment par Rein et al.17. La gouttelette peut prendre différentes formes. Il peut être oscillant, rotatif, ou impact à un angle à la surface. La texture de surface et les facteurs environnementaux tels que la température peuvent varier. Tous ces paramètres rendent le champ des impacts de gouttelettes extrêmement large.
En raison de cette large gamme de variables, les études des phénomènes dynamiques de mouillage liquide se limitent souvent à se concentrer sur des sujets relativement spécifiques ou étroits. De nombreuses enquêtes de ce type utilisent un nombre modéré d’expériences (p. ex., 50 à 200 points de données) obtenues à partir de vidéos haute vitesse traitées manuellement10,20,21,22. L’ampleur de ces études est limitée par la quantité de données qui peuvent être obtenues par le chercheur dans un délai raisonnable. Le traitement manuel des vidéos exige de l’utilisateur qu’il effectue des tâches répétitives, telles que la mesure du diamètre des gouttelettes d’impact, souvent obtenues grâce à l’utilisation d’un logiciel d’analyse d’images (Fidji23 et Tracker24 sont des choix populaires). La mesure la plus largement utilisée pour caractériser les impacts de chute est le diamètre d’une chute de propagation25,26,27,28.
En raison de l’amélioration du traitement d’image, les méthodes automatiques assistées par ordinateur commencent à améliorer l’efficacité de la collecte de données. Par exemple, des algorithmes d’analyse d’images pour la mesure automatique de l’angle de contact29 et la tension de surface à l’aide de la méthode de chute de pendentif30 sont maintenant disponibles. Des gains d’efficacité beaucoup plus importants peuvent être réalisés pour la photographie à grande vitesse des impacts de la chute, qui produit des films composés de nombreuses images individuelles pour l’analyse, et en effet certaines études récentes ont commencé à utiliser l’analyse automatisée15,18, bien que le flux de travail expérimental n’a pas clairement changé. D’autres améliorations dans la conception expérimentale pour les expériences d’impact de chute ont surgi des progrès dans les sources de lumière LED disponibles dans le commerce, qui peuvent être couplés avec des caméras à grande vitesse via la technique de l’ombre31,32,33,34.
Cet article décrit une méthode normalisée pour la capture et l’analyse des films d’impact de chute. L’objectif principal est de permettre une collecte efficace de grands ensembles de données, ce qui devrait être généralement utile pour la grande variété d’études d’impact de chute décrites ci-dessus. À l’aide de cette méthode, le contour numérisé et résolu par le temps d’une goutte d’impact peut être obtenu pour 100 expériences par jour. L’analyse calcule automatiquement les paramètres d’impact des gouttelettes (taille, vitesse, nombres Weber et Reynolds) et le diamètre de propagation maximal. Le protocole s’applique directement aux paramètres de base des gouttelettes (y compris le liquide, la taille et la vitesse d’impact), le matériau de substrat ou les conditions environnementales. Les études qui analysent une large gamme de paramètres expérimentaux peuvent être menées dans un délai relativement court. La méthode encourage également les études à haute résolution, couvrant un petit éventail de variables, avec de multiples expériences répétées.
Les avantages de cette méthode sont fournis par l’expérience normalisée, ainsi qu’une structure de données et un flux de travail clairs. La configuration expérimentale produit des images avec des propriétés cohérentes (spatiale et contrastée) qui peuvent être transmises à un code d’analyse d’image personnalisé (inclus comme un fichier de codage supplémentaire qui s’exécute sur MATLAB) pour le traitement rapide des vidéos enregistrées immédiatement après l’expérience. L’intégration du traitement et de l’acquisition de données est l’une des principales raisons de l’amélioration de la vitesse globale de collecte des données. Après une session d’acquisition de données, chaque vidéo a été traitée et toutes les données brutes pertinentes sont stockées pour une analyse plus approfondie sans nécessiter de retraitement de la vidéo. En outre, l’utilisateur peut inspecter visuellement la qualité de chaque expérience immédiatement après qu’elle soit effectuée et répéter l’expérience si nécessaire. Une première étape d’étalonnage permet de reproduire la configuration expérimentale entre différentes séances de laboratoire avec une bonne précision.
On suppose que pour implémenter cette méthode, l’utilisateur a accès à une caméra à grande vitesse disposée de sorte qu’il image la surface d’un point de vue horizontal (sur le côté). Une représentation schématique de cet arrangement est présentée à la figure 1, y compris la définition des axes cartésiens. Le système doit avoir la capacité de positionner précisément à la fois la caméra et l’échantillon en trois dimensions (X, Y et Z). Une méthode de graphisme est mise en œuvre pour éclairer la gouttelette et est placée le long de la trajectoire optique de la caméra. Le système doit utiliser un système d’éclairage LED à courant direct de haute qualité (DC) (y compris une lentille de condensateur collimante) qui peut être déplacé dans les directions X et Z pour aligner le chemin optique avec la caméra. On suppose également que l’utilisateur a accès à une pompe à seringues qu’il peut programmer pour produire des gouttelettes individuelles du volume désiré lorsqu’il est connecté à une aiguille particulière35. La gouttelette tombe sous gravité de sorte que sa vitesse d’impact est contrôlée par la position de l’aiguille au-dessus de la surface. Bien que cette configuration soit assez générique, le Tableau des matériaux répertorie l’équipement spécifique utilisé pour obtenir les résultats représentatifs et note certaines restrictions potentielles imposées par le choix de l’équipement.
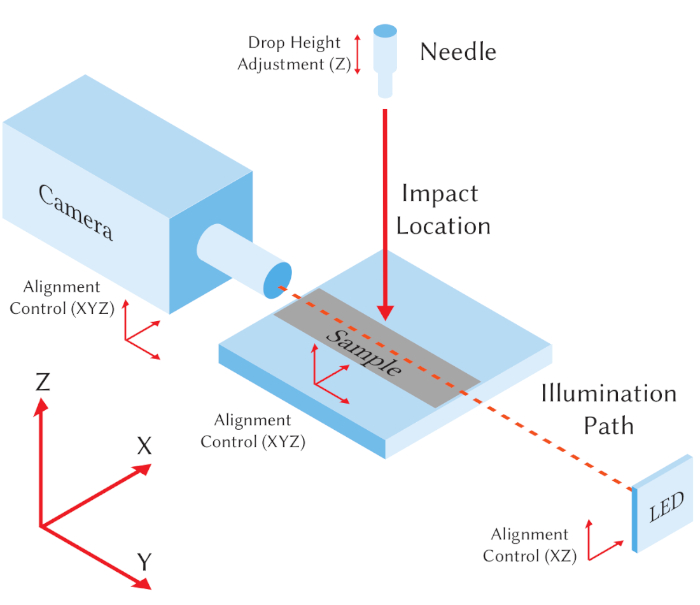
Figure 1 : Représentation schématique de la configuration expérimentale minimale. Une caméra à grande vitesse est positionnée sur des gouttelettes d’image ayant un impact vertical sur un échantillon de côté. Une source lumineuse LED est alignée avec la ligne de vision de la caméra pour la photographie. Une aiguille est utilisée pour la production individuelle de gouttelettes, et les haches cartésiennes sont définies. S’il vous plaît cliquez ici pour voir une version plus grande de ce chiffre.
La description de la méthode est axée sur la mesure des bords des gouttelettes liquides au fur et à mesure qu’elles tombent et impactent. Les images sont obtenues du point de vue secondaire couramment utilisé. Il est possible d’étudier la propagation des gouttelettes à partir de la fois latéralement et bas en haut à l’aide de deux caméras à grande vitesse13,14, mais la vue ascendante n’est pas possible pour les matériaux opaques, et une vue descendante produit des complications d’alignement. Le flux de travail de base pourrait être utilisé pour améliorer la recherche pour tous les petits objets (2 à 3 mm de diamètre) qui ont un impact sur les surfaces, et il pourrait être utilisé pour des objets plus grands ou plus petits avec d’autres changements mineurs. Des améliorations et des alternatives à la configuration expérimentale et à la méthode sont examinées plus loin dans la section de discussion.
