Klinische pathologieën invloed zijn op de sensomotorische systemen, bijvoorbeeld bovenste motorische neuron (UMN) schade na een beroerte, leiden tot functionele beperkingen met inbegrip van zwakte, verlies van posturale stabiliteit en spasticiteit, die een negatieve invloed kan hebben op de motoriek. Herstel variabele met een groot aantal slagoverlevenden niet de functionele mijlpalen veilig staan of lopen 1,2 bereiken.
De discrete praktijk van wandelen en sit-to-stand komen vaak voor revalidatie taken na UMN pathologie 3,4 echter overgangsregeling bewegingen worden vaak verwaarloosd. Sit-to-wandeling (STW) is een sequentiële houdings-bewegingsapparaat taak opnemen sit-to-stand (STS), gait initiatie (GI), en lopen 5.
Scheiding van STS en GI, reflecterende aarzeling tijdens STW is waargenomen bij patiënten met de ziekte 6 pt 7 CVA Parkinson, naast oudere unimpaired 8 volwassenen, maar niet bij jonge gezonde individuen 9. Daarom zitten naar staan-en-wandeling (STSW) wordt gewoonlijk uitgevoerd in de klinische omgeving en wordt gedefinieerd door een pauze fase van variabele lengte bij het staan. Er zijn echter geen gepubliceerde protocollen bijgewerkt definiëren STSW dynamica in een context geschikt om patiëntenpopulaties.
Meestal in STW studies de hoogte eerste stoel is 100% van de kniehoogte (KH, van vloer tot knie afstand), aan de breedte en GI lead-ledematen zijn zelf gekozen, de armen worden gedwongen over de borst en een ecologisch zinvolle taak context is vaak afwezig 5-9. Echter, patiënten vinden een stijging van 100% KH uitdagende 10 en vaak kiezen voor een bredere voet positie in vergelijking met gezonde individuen 11, initiëren gang met hun aangedane been 7, en gebruiken hun armen om momentum 7 te genereren.
Om gait, een toestand verandering in het hele lichaam beweging in een purpos initiëren eful is gewenst 12. Dit wordt bereikt door het ontkoppelen van het gehele lichaam center-of-massa (BCOM: het gewogen gemiddelde van alle beschouwd lichaamssegmenten in ruimte 13) vanaf het middelpunt van druk (COP: de positie van de resulterende grondreactiekracht (GRF) vector 14). In de anticiperende fase van GI, snelle stereotiepe achterste en zijwaartse beweging van de COP in de richting van het ledemaat worden gezwaaid optreedt waardoor BCOM momentum 12,15 genereren. De COP en BCOM worden aldus afgescheiden, de horizontale onderlinge afstand hebben als maat voor dynamische houdingsregulatie 16 voorgesteld.
De berekening van de COP-BCOM afstand vereist gelijktijdige meting van de COP en BCOM posities. De standaard berekening van de COP is hieronder in vergelijking getoond (1) 17:

tp_upload / 54323 / 54323eq2.jpg "/>

(1)
Waar M en Force vertegenwoordigen momenten om de kracht platform assen en de directionele GRF respectievelijk. De indices vertegenwoordigen assen. De oorsprong is de verticale afstand tussen het contactvlak en de oorsprong van de kracht platform, en wordt beschouwd als nul.
De kinematische methode waarbij BCOM positie omvat het volgen van de verplaatsing van gesegmenteerde markers. Een getrouwe weergave van body-segment beweging kan worden bereikt door markers geclusterd op harde borden afstand geplaatst van benige oriëntatiepunten, minimaliseren zacht weefsel-artefact (CAST techniek 18). Om BCOM positie te bepalen, worden individuele lichaam segment massa's geschat op basis van cadaveric werk 19. Driedimensionale (3D) bewegingssysteem proprietary software maakt gebruik van de coördinatie van standpunten van de proximale en dIstal segment locaties: 1) bepalen segmentale lengtes, 2) rekenkundig schatten segmentale massa, en 3) te berekenen segmentale COM locaties. Deze modellen zijn vervolgens in staat om schattingen van de 3D BCOM positie verschaffen op een bepaald punt in de tijd op basis van de netto som van inter-segmentale posities (figuur 1).
Zo is het doel van dit document is eerst een gestandaardiseerd protocol STSW die ecologisch valide en omvat opstaan uit een hoge zithoogte presenteren. Het is eerder aangetoond dat STSW van 120% KH is biomechanisch onduidelijk van 100% KH blokkeren generatie van lagere BCOM verticale snelheden en GRF tijdens de stijgende 20, wat betekent dat een stijging van 120% KH is makkelijker (en veiliger) voor gecompromitteerde individuen. Ten tweede, COP-BCOM horizontale afstanden af te leiden om dynamische posturale controle tijdens belangrijke mijlpalen en overgangen met behulp van 3D motion-capture beoordelen. Deze werkwijze werd in gezonde individuen tijdens STSW onafhankelijk van ledematen le isad 20, biedt het vooruitzicht van de functionele evaluatie herstel. Tenslotte wordt een voorlopige STSW dataset representatief zijn voor jonge, gezonde individuen gepresenteerd, en intra- en inter-individuele variatie in de groep wordt gedefinieerd om een vergelijking te informeren met pathologische individuen.
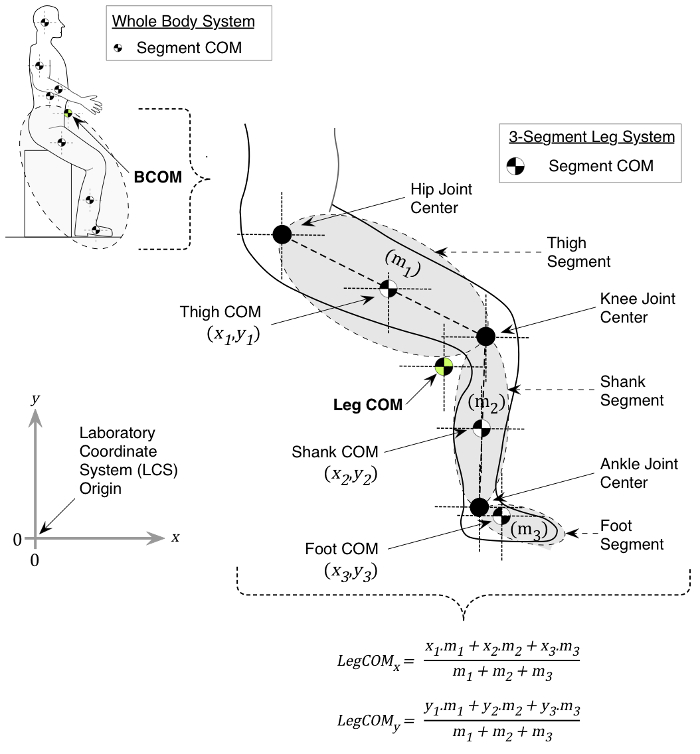
Figuur 1. 2D BCOM berekening. Eenvoudigheidshalve het voorbeeld wordt een berekening hele been COM van een 3-gekoppelde massa in 2 dimensies, waarbij coördinaten van de respectieve COM posities (x, y) en segmentale massa (m 1, m 2, m 3) zijn bekend. Segment massa en locatie van gesegmenteerde COM posities ten opzichte van het laboratorium coördinatensysteem (LCS; herkomst: 0, 0) worden geschat door beweging analysesysteem ontwikkelde software gebruikt onder lichaamsgewicht en gepubliceerde antropometrische gegevens (zie hoofdtekst). De x eennd y been COM positie, in dit voorbeeld van de 3-gekoppelde massa wordt dan afgeleid met behulp van de getoonde formules. Klik hier om een grotere versie van deze figuur te bekijken.
