Küçük ve taşınabilir ultrason (ABD) tarayıcılar için artan Pazar yeni echographic sondalar sinyal-klima ve demetleme hangi kısmında elektronik Sonda tanıtıcı, özellikle 3D/4 D görüntüleme içine entegre geliştirme yol açmaktadır 1. bu yüksek düzeyde entegrasyonu sağlamak için uygun özellikle gelişmekte olan teknolojileri şunları içerir: Micromachined ultrasonik güç çeviriciler (MUTs)2, mikro elektro-mekanik sistem (MEMS) güç çeviriciler silikon üzerinde fabrikasyon bir sınıf. Özellikle, kapasitif MUTs (CMUTs) sonunda onları geçerli bir alternatif için gelecek nesil ultrason görüntüleme sistemleri3piezoelektrik dönüştürücüler yapan bir teknolojik olgunluğa ulaşmış. CMUTs çok yüksek ısı verimliliği daha yüksek görüntü çözünürlüğü – veren geniş bant genişliği – Mikroelektronik teknolojileriyle ve her şeyden önce yüksek hassasiyet4onların uyumluluk nedeniyle itiraz ediyorlar. ENIAC JU proje DeNeCoR (NeuroControl ve NeuroRehabilitation için aygıtlar)5bağlamında, ABD beyin görüntüleme uygulamalarında (örneğin Beyin Cerrahisi), yüksek kaliteli nerede için geliştirilen6 CMUT sondalar davranıyorsun 2D/3D/4 D görüntüleri ve beyin yapıları doğru bir şekilde temsil gereklidir.
Yeni ABD probları geliştirme sürecinde performans görüntüleme erken değerlendirme gerçekleştirme imkanı esastır. Tipik değerlendirme teknikleri çözünürlük ve kontrast, doku taklit eden hayalet görüntüleri bilinen geometri ve echogenicity katıştırılmış hedefleri olan temel gibi belirli parametreleri ölçme içerir. Daha gerçekçi analizi uygulamaya özel görüntüleme hedefleri olan ABD probları belirli bir klinik alana kendi potansiyel uygulamasında beklenen performansı erken bir değerlendirmesi için son derece değerli olabilir. Öte yandan, satın alma tam tekrarlanabilirlik karşılaştırmalı farklı konfigürasyonları zamanla sınamak için temel ve bu gereksinimin in vivo deneyler tamamen kurallarını.
Çeşitli eserler tanı görüntüleme teknikleri konusunda literatürde önerilen ex vivo hayvan örnekleri7, kadavra beyin8veya hayaletler9 farklı amaçlar10, taklit doku kullanımı dahil görüntüleme yöntemleri, kayıt algoritmaları, manyetik rezonans (MR) dizileri veya ABD ışın-desen ve görüntü kalitesinin test. Örneğin, beyin görüntüleme, Lazebnik ve ark. bağlamında 7 formalin sabit koyun beyni yeni bir 3D Bay kayıt yöntemi değerlendirmek için kullanılan; benzer şekilde, Choe vd. 11 Bay kayıt ve sabit baykuş maymun beyni ışık mikroskobu görüntüleri için bir yordam araştırıldı. Hayalet bir polivinil alkol (PVA) beyin9 ‘ da geliştirilen ve multimodal resim satın almalar (Yani Bay, ABD ve bilgisayarlı tomografi) kaydı test etmek için bir paylaşılan görüntü veri kümesi12 oluşturmak için gerçekleştirmek için kullanılan ve görüntüleme algoritmaları.
Genel olarak, bu çalışmalar görüntü satın almalar için gerçekçi bir hedef kullanımı gerçekten yeni bir görüntüleme tekniği geliştirme sırasında önemli bir adım olduğunu doğrulayın. Bu hala bir prototip aşamasında ve zamanla, bir doğru tüm tasarımını ayarlama için kapsamlı ve tekrarlanabilir test ihtiyacı bu kağıt, sunulan CMUT bize sonda gibi yeni bir görüntü aygıtı tasarlarken daha kritik bir sahne temsil eder önce onun son gerçekleşme ve (olduğu gibi13,14,15) vivo uygulamalarda olası doğrulama parametreleri.
Bu çalışmada açıklanan deneysel protokol böylece yeni geliştirilen ABD probları CMUT teknolojisine dayalı bir sağlam, uygulamaya özel görüntüleme değerlendirme prosedür sağlamak için dizayn edilmiştir. Gerçekçilik ve tekrarlanabilirlik, sığır emin olmak için (Standart gıda tedarik ticari zinciri elde edilen) beyin formalin içinde sabit hedefler Imaging olarak seçilmiştir. Fiksasyon yordam görünürlük özelliklerini hem ABD hem de16,17Imaging Bay içinde ve tatmin edici Morfolojik özellikleri koruyarak doku uzun vadeli korunması güvence altına alır.
İletişim kuralı ABD görüntü kalitesi değerlendirilmesi için burada Ayrıca neuronavigation teknikleri Nöroşirürji15için kullanılan bir özellik ödünç uygular nitelendirdi. Bu tür yaklaşımlar, ABD probları bir hareket uzamsal konumu ve yönlendirme verileri gerçek zamanlı olarak sağlar sistem izleme bağlanır. Bu şekilde, cerrahi faaliyetleri sırasında alınan ABD görüntüleri otomatik olarak kaydedilecek ve rehberlik, hastanın beyin pre-operatory Bay resimlere süperpozisyon için görüntülenir. Sunulan Protokolü amaçlar için süperpozisyon (hangi beyin görüntüleme altın standart olarak kabul edilir) MR görüntüleri ile büyük bir değer, görsel olarak da değerlendirmek insan uzmanlar morfolojik izin verir ve doku özellikleri olarak tanınır çünkü ABD görüntüleri ve vice versa eserler Imaging varlığını tanımak için.
Farklı ABD probları ile alınan görüntüleri karşılaştırmak için olasılığını daha da ilginç hale gelir. Sunulan deneysel protokol kayma başvuru pozlar için ABD satın almalar, Bay görüntüleri bir ön görsel denetim içinde tanımlanan en şekil-zengin cilt bölgelerinde odaklanan bir kümesini tanımlamak için olasılığını içerir. Paraview açık kaynak yazılım sistemi18için geliştirilen entegre bir görsel aracı ABD görüntü edinme aşamaları sırasında önceden tanımlanmış böyle pozlar eşleştirmek için işleçleri için rehberlik sağlar. Protokolü için gereken kalibrasyon işlemleri için tüm hedef örnekler – biyolojik veya sentetik – kesin kayma başvuru sağlayan önceden tanımlanmış pozisyon yerler ile donatmak için esastır. Böyle yerler görünür hem ABD hem de Bay görüntüler ve fiziksel olarak hareket takip sistemi ile yapılan ölçümler erişilebilir olması gerekir. Flint görünürlüğü hem ABD hem de Bay görüntülerde edebiyat19 ‘ gösterdi ve daha önce sunulan deneyler yapılan ön ABD ve Bay taramaları tarafından onaylandıktan cam, küçük küreler deneme için seçilen Simgesel Yapı öğelerdir.
Sunulan Protokolü ultrason gelişmiş açık Platform (ULA-OP)20, bir tam ve açık araştırma ve geliştirme sistemi bizim için ticari olarak daha fazla daha geniş deneysel seçenek kullanılabilir sunuyor resim alma dayanmaktadır tarayıcılar ve farklı ABD probları değerlendirilmesi için ortak bir temel olarak hizmet vermektedir.
İlk olarak, bu çalışmada kullanılan aletler, yeni tasarlanmış CMUT sonda özellikle atıfta bulunarak açıklanmıştır. Deneysel protokol intro olduğunuilk tasarım sistemi kalibrasyon, resim alma ve Post-işleme dahil tüm yordamları ayrıntılı bir açıklama ile ayrıntılı olarak duced. Son olarak, elde edilen görüntüleri sunulmaktadır ve sonuçları, bu çalışmanın gelecekteki gelişmeler için ipuçları ile birlikte ele alınmıştır.
Araçları
CMUT sonda prototip
Kullanarak CMUT ters imalat süreci (tasarlanmış, fabrikasyon ve Roma Tre Üniversitesi (Roma, İtalya), Acoustoelectronics laboratuar’de (ACULAB) Paketli bir yeni geliştirilen 256-eleman CMUT doğrusal dizi prototip, kullanarak deneyler yapılmıştır RFP)4. RFP bir microfabrication olduğunu ve teknoloji, özellikle MEMS güç çeviriciler gerçekleşmesi için bize görüntüleme uygulamalarında, mademki CMUT Mikroyapı silikon aşağıdaki fabrikasyon için gebe ambalaj bir “ters”21yaklaşım. Diğer CMUT imalat teknolojileri ile karşılaştırıldığında, RFP CMUT hücreleri geometri tüm dizi boyunca yüksek tekdüzelik nedeniyle gelişmiş görüntüleme performansı ve sonda baş paketindeki akustik mühendislik malzemelerin kullanımı için verir. Bir önemli RFP elektrik ara bağlantı yastıkları 2D diziler ve ön uç çok kanallı elektronik 3D-entegrasyon kolaylaştırır CMUT die arka tarafında bulunan özelliğidir.
256-eleman CMUT dizi merkezli 7.5 MHz frekans bandında çalışması için tasarlanmıştır. Bir öğe aralığı 200 µm 51,2 mm maksimum görüş alanı genişliği içinde ortaya çıkan dizi için seçildi. Tek CMUT dizi öğelerini yüksekliğini yanal çözünürlük ve penetrasyon yeteneği açısından uygun performans elde etmek için tanımlanmıştır. 5 mm dizi öğesinin yüksekliği 0,1 mm-3 dB demet genişliği ve odak 7.5 MHz, 1.8 mm-3 dB derinliği ne zaman ayrıcalık odak 18 mm derinlikte akustik bir lens aracılığıyla fixing elde etmek için seçildi. 195 µm çapında dizi öğelerini düzenleme ve elektrikle paralel 344 dairesel CMUT hücrelerde, altıgen bir düzen takip bağlanma elde edilmiştir. Sonuç olarak, elde edilen 5 mikron öğe öğe mesafe, Yani çentik zarı membran ayırma ile eşleşir. CMUT dizi yapısının şematik gösterimi şekil 1‘ de bildirilmektedir.
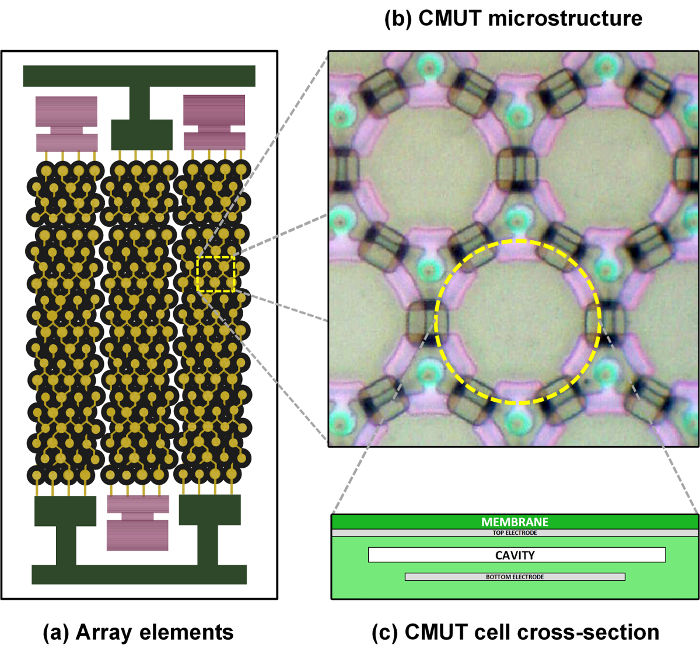
Şekil 1: CMUT dizi yapısı. CMUT dizi yapısının şematik Gösterim: dizi öğeleri birkaç hücreyi paralel (a) içinde yerleşimini CMUT Mikroyapı (b); bağlı oluşan kesit CMUT hücre (c). Bu rakam daha büyük bir versiyonunu görüntülemek için buraya tıklayınız.
CMUT microfabrication parametreleri, Yani lateral ve plaka ve elektrotlar, dikey boyutları tanımlanan ile karakterize bir geniş bant daldırma işlemi gerçekleştirmek amacı ile sonlu eleman modelleme (FEM) simülasyonları kullanarak bir Frekans tepkisi 7.5 MHz ve %100-6 dB iki yönlü kesirli bant merkezli. Yani boşluğu boşluğu yüksekliği 80 V maksimum uyarma sinyal voltajı dikkate alınarak CMUT çöküşü voltaj4, % 70’i, kutuplama tarafından iki yönlü hassasiyeti en üst düzeye çıkarmak için 260 V Daralt gerilim elde etmek için tanımlanmıştır. Tablo 1 microfabricated CMUT ana geometrik parametreler özetlenmiştir.
| CMUT dizi tasarım parametreleri | |
| Parametre | Değer |
| Dizi | |
| Öğe sayısı | 256 |
| Öğe aralığı | 200 µm |
| Öğe uzunluğu (ayrıcalık) | 5 mm |
| Sabit yükseklik odak | 15 mm |
| CMUT Mikroyapı | |
| Hücre çapı | 50 µm |
| Elektrot çapı | 34 µm |
| Hücre hücre yanal mesafe | 7.5 µm |
| Plaka kalınlığı | 2.5 µm |
| Boşluğu yüksekliği | 0.25 µm |
Tablo 1. CMUT sonda parametreleri. CMUT doğrusal dizi sonda ve CMUT hücre Mikroyapı geometrik parametreler.
Bir sonda kafası CMUT dizide tümleştirmek için kullanılan paketleme işlemi başvuru4‘ te açıklanmıştır. Akustik objektif bir oda sertleştirilmiş sıcaklık (RTV) silikon kauçuk metal oksit nanopowders ile katkılı su akustik empedans maç ve arabirim22sahte yansımaları önlemek için kullanma fabrikasyon. Elde edilen bileşiğin 1280 kg/m3 yoğunluğu ve ses 1100 m/s’lik bir hız ile karakterize edildi. 7 mm eğrilik yarıçapı geometrik bir odak 18 mm ve maksimum kalınlığı yaklaşık 0,5 mm dönüştürücü yüzey yukarıda silindirik lens için seçildi. CMUT sonda kafa resmi Şekil 2(a)içinde gösterilir.
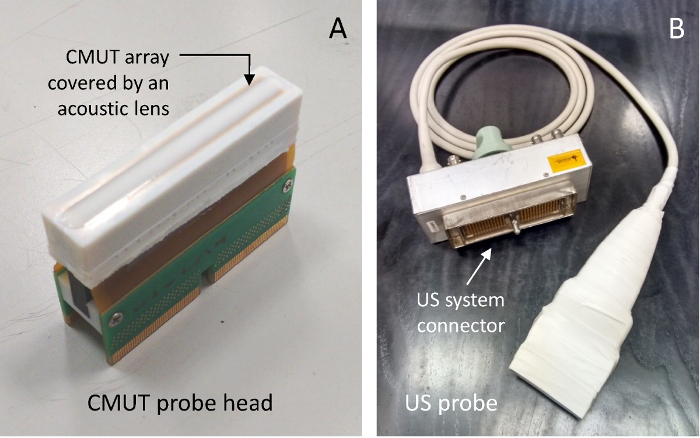
Resim 2: CMUT soruşturma. Dönüştürücü ve akustik lens (a), doğrusal dizi de dahil olmak üzere Gelişmiş CMUT sonda ve tam CMUT sonda ile bağlayıcı (b) Başkanı. Bu rakam daha büyük bir versiyonunu görüntülemek için buraya tıklayınız.
CMUT sonda kafası çok kanallı Resepsiyon analog ön uç elektronik ve multipolar kablo bağlantısı için ABD tarayıcı içeren sonda işlenecek birleştiğinde. Tek kanal elektronik devre elektrik geçerli gerekli kablo empedansı sürücü sağlar yüksek giriş empedansı 9 dB-kazanç gerilim amplifikatör olduğunu. Çok kanallı elektronik başvuru 4‘ te açıklanan, ultra düşük güç düşük noise alıcı ve sinyal iletme/alma önlü arkalı yazdırma için entegre bir anahtarı da dahil olmak üzere bir devre topolojisini temel alır. Ön uç elektronik güç kaynağı ve CMUT önyargı voltaj bir özel güç kaynağı ünitesi tarafından oluşturulan ve multipolar kablo aracılığıyla sondayı beslenir. Tam sonda Şekil 2(b)gösterilir.
Piezoelektrik ABD probları
CMUT sonda ile elde edilen görüntülerin nitel karşılaştırma içinyukarıda, iki piyasada bulunan piezoelektrik ABD sondalar deneyleri içinde dahil edilmiştir. İlki öğeleri, 245 µm zift ve bir % 110 kesirli bant genişliği 8 MHz de merkezli transducing 192 ile bir dizi doğrusal sonda var. Bu sonda 2D B-modundaki görüntüler elde etmek için kullanılmıştır. İkinci sondası 180 öğelerle bir 245 µm adım ve bir % 100 kesirli bant genişliği 8,5 MHz de merkezli transducing mekanik olarak ok açılı tipler bir doğrusal dizi 3D görüntüleme için bir sonda var. Step motor sağlayan bir 3D görüntü taranan birim23yeniden oluşturmak için kullanılan birden çok düzlem elde etmek için doğrusal dizi süpürme konut sonda içinde yerleştirilir.
ULA-OP sistemi
ABD görüntüleri edinimi tasarlanmış ve İtalya Floransa Üniversitesi Mikroelektronik sistemleri tasarım Laboratuvarı fark bir tam ve açık ABD araştırma ve geliştirme sistemi olan, ULA-OP sistemi20, istihdam ederek gerçekleştirilmiştir. ULA-OP sistemi denetleyebilir, hem iletim (TX) ve alma (RX), en fazla 64 bağımsız kanal geçiş matrisi ile bir ABD sonda ilâ 192 piezoelektrik veya CMUT güç çeviriciler birbirine bağlı. Sistem mimarisi özellikleri iki ana işleme kartları, bir Analog Kurulu (AB) ve bir dijital pano (DB), her ikisi de bir raf içinde yer alan bir güç kaynağı yönetim kurulu ve sonda bağlayıcı ve tüm iç yönlendirme içeren bir geri-uçak Kurulu tarafından tamamlanan bileşenleri. AB için sonda dönüştürücüler, ön uç özellikle 64 kanal ve dinamik güç çeviriciler için TX-RX kanalları haritalar programlanabilir anahtarı matris analog Klima için elektronik bileşenleri içerir. Sorumlu gerçek zamanlı demetleme DB’dir, TX sinyalleri sentezleme ve RX işleme (örneğin B-mod görüntüler veya Doppler Sonogramları) istenen çıkış üretmek için yankıları. Vurgulama ULA-OP sistemi tamamen yapılandırılabilir, bu nedenle TX sinyali en içeren herhangi bir rasgele dalga sistemi bant genişliği (örneğin üç düzeyli bakliyat, sinüs-patlamaları, cırlama, Huffman kodları, vb) içinde olabilir değer 180 Vpp genliği; Buna ek olarak, demetleme strateji-ebilmek var olmak program son odaklama desenleri (odaklıörneğin dalga, çok satırı iletim, düzlem dalga, uzaklaşan dalgalar, sınırlı kırınım kirişler, vb) göre24,25 . Donanım düzeyinde bu görevleri beş alan Programmable Gate diziler (FPGA) ve bir dijital sinyal işlemcisi (DSP) arasında paylaşılır. Mekanik süpürüldü 3D probları, yukarıda açıklandığı gibi görüntüleme ULA-OP sistemi de tek tek 2D kare dönüştürücü dizinin her konumda eşitlenmiş edinimi için sonda içinde step motor kontrol eder.
ULA-OP sistemi çalışma zamanında yeniden yapılandırılmış ve farklı ABD probları için uyarlanmış. Özel bir yazılım aracı ile donatılmış bir ana bilgisayar ile USB 2.0 kanalından iletişim kurar. İkinci çeşitli modlarda yeniden ABD görüntülerin gerçek zamanlı görselleştirme sağlar yapılandırılabilir bir grafik arayüze sahip; hacimsel probları ile örneğin, taranan birimindeki dikey uçakların iki B-modundaki görüntüler gerçek zamanlı olarak görüntülenebilir.
TX-RX parametrelerinin kolay bir ayarlama sağlar ve sinyal işleme zinciri26da sağlayarak, her adımda toplanan verilerin tam erişim sunuyor açıklanan protokol ULA-OP sistemi amacıyla büyük avantajı olduğunu Yeni görüntüleme yöntemleri ve demetleme teknikleri27,28,29,30,31,32,33test etmek için.
Hareket izleme sistemi
Kayda ABD pozisyon resim alma sırasında yoklama, optik bir hareket takip sistemi istihdam34. Sistem iki aydınlatıcılar (ışık yayan diyotlar (LED’ler)) ile kızılötesi ışık yayan bir sensör birim temel alır ve iki alıcısı (Yani bir lens ve bir şarj kuplajlı cihaz (CCD)) tarafından birden çok amaçlı özel pasif yansıyan ışık algılamak için kullanır önceden tanımlanmış katı şekillerde düzenlenmiş işaretleri. Yansıyan ışık hakkında bilgi sonra USB 2.0 bağlı bir ana bilgisayara transfer pozisyon ve yönlendirme verileri hesaplamak için yerleşik bir işlemci tarafından işlenir. Aynı bağlantı sensör biriminin yapılandırmasını denetlemek için kullanılabilir.
Sensör ünitesi araçlar kümesi ile birlikte gelir, her bir katı geometrik Yapılandırması’nda düzenlenen dört yansıtıcı imleçli donatılmış. Hareket sistemi izleme altı farklı katı araçları aynı anda, yaklaşık 20 Hz çalışma frekansında izleyebilirsiniz. İki tür araç bu deneyler için kullanıldı: 3B konumlandırma edinme ucu tarafından dokundu sağlar, bir işaretçi aracını ve ABD soruşturma altında eklenebilir kelepçe donanımlı aracı, test (bkz. Şekil 14).
Yazılım tarafında hareket izleyici’yi USB üzerinden erişilebilen her iki birim denetim ve veri toplama, bir alt düzey seri uygulama programlama arabirimi (API) sahiptir. Varsayılan olarak, konumu ve yönelimleri çok giriş öğeleri, Yani izlenen her aracın her bir giriş döndürülür. Her girdi mm olarak ifade edilen 3B konumlandırma (x, y, z) ve bir dördey ifade edilen bir yönlendirme (q0, qx, qy, qz) içerir. Sistem Ayrıca görselleştirme ve gerçek zamanlı olarak pozisyonlar/yönelimleri sensör ünitesi görüş alanı içinde birden fazla aracı ölçüm için bir grafik izleme aracı’nı içeren bir üst düzey yazılım aletlerini, toolbox ile gelir.
Sistem genel bakış, entegrasyon ve yazılım bileşenleri
Şekil 3 diyagramında da akar sistemleri arasında veri akışını açıklayan protokolü için kabul edilen araçları özetlenmiştir.
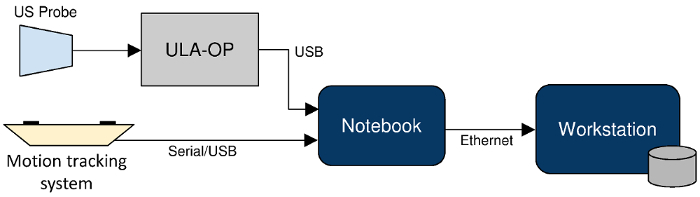
Resim 3: blok şeması tüm donanım kurulumu ve sistem entegrasyon. ABD sonda ABD resim alma için Not Defteri ile USB üzerinden iletişim ULA-OP sistemi bağlıdır. Aynı zamanda, defter de takip sistemi, konumu veri toplama, hareket için USB üzerinden ve iş istasyonu için veri işleme için Ethernet üzerinden bağlı. Bu rakam daha büyük bir versiyonunu görüntülemek için buraya tıklayınız.
ABD probları, hareket izleyici’yi ve yukarıda açıklanan, ULA-OP sistemi dışında Kur iki bilgisayarları, yani bir defter ve bir iş istasyonu da içerir. Eski alma ve iki ana gelen veri akışlarını eşitleme araçları için ön uç ana olduğunu: ULA-OP sistemi ve hareket izleyici’yi verilerden konumlandırma 3D gelen ABD görüntüler. Bu da elde belgili tanımlık imge için işleç için görsel geri besleme sağlar. İş istasyonu önemli ölçüde daha yüksek hesaplama gücü ve depolama kapasitesine sahiptir. Görüntü sonrası işleme ve kombine görüntüleme veri kümeleri için bir depo arka destek sağlar. İş istasyonu da kullanılırABD ve MR görüntüleri görselleştirme için eş zamanlı 3 boyutlu görselleştirme kayıtlı Multi-Modal görüntü imkanı da dahil olmak üzere.
Görüntü edinme deneyler için kritik iki ana veri akışlarını eşitlenmesi zorunludur. Hareket takibi ve ULA-OP sistemleri henüz açık bir eşitleme etkinliklerini desteklemez bağımsız araçlardır. Bu nedenle, ABD görüntü veri ve konum bilgileri düzgün ABD sonda doğru 3B konumlandırma her görüntü dilimi satın alınmıştır anda algılamak için kombine olarak gerekir. Bu amaçla, belirli günlük uygulama için kayıt ve gerçek zamanlı olarak zaman damgası takip sistemi, bu durumda, hareket izleyici’kendisi dahil bir C++ yazılım bileşeni değiştirerek hareket tarafından sağlanan veri geliştirilmiştir. Tipik olarak, hareket izleme sistemleri sağlar gerçek zamanlı veri yakalama ve bunları bir dosyaya transkripsiyonu bir alt düzey API özelliği.
Evlatlık eşitleme yöntemi aşağıdaki gibi çalışır. Günlük uygulama tarafından üretilen dosya içindeki her iki girdinin biçimde “yyyy-MM-ddThh:mm:ss.kkk”, bir zaman damgası ile nerede augmented: y = yıl, M = ay, d gün, s = saat, = m = dakika, s = ikinci, k milisaniye =. ULA-OP PC tabanlı yazılım (C++ ve MATLAB programlama dilleri) başlangıç ve bitiş saati her görüntü edinme serisinin hesaplar ve bu bilgileri .vtk biçiminde her resim saklar. Deneyler sırasında ortak zamansal referans sağlamak için her iki Yukarıdaki yazılım yordamları şekil 3‘ te ön uç bilgisayarda çalıştırılır. Bu şekilde üretilen zaman damgaları sonra son veri kümesi üretmek son işlem yazılım yordamları tarafından kullanılır (bkz: protokolü, Bölüm 8).
Başka bir belirli yazılım bileşeni fark etti ve ABD araştırma pozisyon Bay resimlere ve özellikle, önceden tanımlanmış pozlar kümesi için geçerli ilgili operatöre, gerçek zamanlı geribildirim sağlamak için iş istasyonu üzerinde çalıştırın. Bir sunucu tarafı yazılım rutin Python ile hareket izci günlük dosyasını çalıştırır, ABD sonda bir geometrik şekil ve bir Paraview sunucuya veri gönderir pozisyona geçerli çevirir. Paraview istemci aynı Paraview sunucu ve gerçek zamanlı görüntüler Bay görüntüde ve daha önceden tanımlanmış pozlar açıklayan geometrik şekiller üst üste geometrik şeklin konumunu bağlanır. Elde edilen gerçek zamanlı görselleştirme örneği şekil 17‘ gösterilir.
