Le marché croissant des dispositifs d’échographie petit et portable (US) entraîne le développement de nouvelles sondes échographiques dans quelle partie du conditionnement du signal et formation de faisceau électronique est intégré dans la poignée de la sonde, surtout pour l’imagerie 3D/4D 1. les technologies émergeantes particulièrement adaptés pour atteindre ce haut niveau d’intégration comprennent transducteurs ultrasoniques micro-usinés (MUTs)2, une classe de transducteurs de système d’électromécaniques Micro (MEMS) fabriquées sur silicium. En particulier, capacitif MUTs (CMUTs) ont enfin atteint une maturité technologique qui fait d’eux une alternative valable à des transducteurs piézoélectriques pour la génération prochaine échographie systèmes d’imagerie3. CMUTs sont très attrayants en raison de leur compatibilité avec les technologies de la microélectronique, large bande passante – ce qui donne une résolution d’image supérieure – rendement thermique élevé et, par-dessus tout, sensibilité élevée4. Dans le cadre du projet ENIAC JU DeNeCoR (dispositifs pour neurocontrôle et réadaptation neurologique)5, CMUT sondes sont actuellement développés6 pour US d’imagerie cérébrale (p. ex. neurochirurgie), des applications où la qualité des images 2D/3D/4D et représentation précise des structures cérébrales sont nécessaires.
Dans le processus de développement de nouvelles sondes américaines, la possibilité de réaliser les premières évaluations de performance d’imagerie est fondamentale. Techniques d’évaluation typique impliquent mesurer certains paramètres comme la résolution et de contraste, basée sur des images de fantômes imitant le tissu avec les cibles embarquées de géométrie connue et échogénicité. Une analyse plus réaliste avec des objectifs d’imagerie spécifique à l’application peut être extrêmement utile pour une évaluation rapide de la performance attendue des sondes américaines dans leur potentiel d’application à un domaine clinique spécifique. En revanche, la répétabilité complète des acquisitions est fondamentale pour des essais comparatifs de différentes configurations au fil du temps, et cette exigence exclut tout à fait des expériences in vivo .
Plusieurs œuvres de la littérature sur les techniques d’imagerie diagnostiques proposé l’utilisation des ex vivo spécimens animaux7, cadavre cerveaux8ou tissus imitant les fantômes9 pour différents buts10, incluent le tests de méthodes d’imagerie, algorithmes d’enregistrement, des séquences par résonance magnétique (IRM) ou l’US-du faisceau et résultant d’une qualité d’image. Par exemple, dans le cadre de l’imagerie cérébrale, Lazebnik et al. 7 utilisé un cerveau de mouton fixés au formol pour évaluer une nouvelle méthode d’enregistrement 3D Monsieur ; de même, Choe et al. 11 a étudié une procédure pour l’enregistrement des MR et des images de microscopie photonique d’un cerveau de singe hibou fixe. Un cerveau d’alcool polyvinylique (PVA) fantôme a été développé en9 et utilisé pour effectuer des acquisitions de multimodal image (c’est-à-dire Monsieur, US et la tomodensitométrie) pour générer une image partagée dataset12 pour les essais d’enregistrement et algorithmes d’imagerie.
Dans l’ensemble, ces études confirment que l’utilisation d’un objectif réaliste pour les acquisitions de l’image est en effet une étape essentielle lors de l’élaboration d’une nouvelle technique d’imagerie. Cela représente un stade encore plus critique lors de la conception d’un nouvel appareil d’imagerie, comme la sonde CMUT nous présenté dans cet article, qui est toujours dans une phase de prototypage et de tests étendue et reproductibles au fil du temps, pour un réglage précis de toute la structure a besoin paramètres avant sa réalisation finale et validation possible dans in vivo des applications (comme à13,14,15).
Le protocole expérimental décrit dans cet ouvrage a été conçu par conséquent de prévoir une procédure d’évaluation d’imagerie robuste, spécifiques à l’application des sondes US nouvellement développé basés sur la technologie CMUT. Pour assurer un réalisme et répétabilité, bovine cerveaux (obtenu par le biais de la chaîne commerciale standard d’approvisionnement alimentaire) fixés dans du formol ont été choisis comme cibles d’imagerie. La procédure de fixation garantit une conservation à long terme des caractéristiques du tissu tout en conservant les qualités morphologiques satisfaisantes et les propriétés de visibilité États-Unis et M. formation image16,17.
Le protocole pour l’évaluation de la qualité de l’image US décrit ici aussi implémente une fonctionnalité empruntée de neuronavigation techniques utilisées pour neurochirurgie15. Dans ces approches, les sondes américaines sont reliées à un système qui fournit l’orientation données en temps réel et la position spatiale de suivi de mouvement. De cette façon, images d’US acquises lors d’activités chirurgicales peuvent automatiquement enregistrés et visualisés, d’orientation, en superposition à des images de résonance durales du cerveau du patient. Pour l’application du protocole présenté, la superposition avec des images de résonance (qui sont considérées comme l’étalon-or en imagerie cérébrale) est de grande valeur, parce il permet des experts humains pour évaluer visuellement qui morphologiques et caractéristiques tissulaires sont reconnaissables dans les images de l’US et, vice versa, de reconnaître la présence d’artefacts d’imagerie.
La possibilité de comparer les images obtenues avec les différentes sondes US devient encore plus intéressante. Le protocole expérimental présenté inclut la possibilité de définir un ensemble de poses de référence spatiale pour les acquisitions aux États-Unis, principalement dans les régions de volume plus riche identifiées lors d’une inspection visuelle préliminaire des images de M.. Un outil visuel intégré, développé pour le Paraview open source logiciel système18, apporte aux opérateurs pour faire correspondre ces poses prédéfinies lors de phases d’US image acquisition. Pour les procédures d’étalonnage requis par le protocole, il est fondamental d’équiper tous les spécimens de cible – biologiques ou synthétiques – avec des repères de position prédéfinie qui fournissent des références spatiales sans ambiguïté. Ces points de repère doivent être visibles dans les images américaines et M. et physiquement accessible aux mesures effectuées avec le système de suivi de mouvement. Les éléments de repère choisi pour l’expérience sont de petites sphères de verre Flint, dont la visibilité dans les images américaines et Monsieur a été démontrée dans la littérature19 et confirmée par des explorations américaines et M. préliminaires effectuées avant les expériences présentées.
Le protocole présenté repose sur l’ échographie Advanced Open Platform (ULA-OP)20, une recherche complète et ouverte et système de développement pour nous acquisition d’images, qui offre des possibilités beaucoup plus expérimentales que commercialement disponibles scanners et sert de base commune pour l’évaluation des différentes sondes US.
Tout d’abord, les instruments utilisés dans cet ouvrage sont décrites, avec une référence particulière à la sonde CMUT nouvellement conçue. Le protocole expérimental est introprésente en détail, avec une description complète de toutes les procédures impliquées, de la conception initiale, le système de calibrage, post-traitement et acquisition d’images. Enfin, les images obtenues sont présentés et les résultats sont discutés, ainsi que des conseils pour les développements futurs de ce travail.
Instrumentation
Prototype de sonde CMUT
Les expériences ont été effectuées à l’aide un nouvellement mis au point 256 éléments CMUT linéaire prototype, conçu, fabriqué et emballé à la laboratoire de Acoustoelectronics (ACULAB) de l’Université de Roma Tre (Rome, Italie), à l’aide de la (CMUT inverser des processus de Fabrication DP)4. DP est une microfabrication et emballage technologies, spécifiquement conçu pour la réalisation de capteurs MEMS pour nous applications, auquel cas la microstructure CMUT est fabriquée suivant de silicium d’imagerie un « upside-down » approche21. Par rapport aux autres technologies de fabrication CMUT, DP cède à l’amélioration des performances d’imagerie en raison de la grande uniformité de géométrie de LiPo CMUT sur l’ensemble du tableau et à l’utilisation de matériaux acoustiquement machinés dans le paquet de tête de sonde. Une caractéristique importante de DP, c’est que les coussinets d’interconnexion électriques sont situés sur la partie arrière de la filière CMUT, qui facilite la 3D-intégration des tableaux 2D et frontal multi-canaux électronique.
Le tableau CMUT 256 éléments a été conçu pour fonctionner dans une bande de fréquences centrée à 7,5 MHz. L’emplacement de l’élément de 200µm a été choisi pour le tableau résultant dans une largeur de champ de vision maximum de 51,2 mm. La hauteur des éléments du tableau unique de CMUT a été définie pour obtenir un rendement approprié en ce qui concerne la résolution latérale et la capacité de pénétration. Une hauteur de l’élément de tableau 5 mm a été choisie afin d’obtenir une largeur de faisceau de-3 dB de 0,1 mm et une profondeur de-3 dB de l’objectif de 1,8 mm à 7,5 MHz, pour fixer la mise au point d’altitude sur une profondeur de 18 mm au moyen d’une lentille acoustique. 195 éléments du tableau de l’échelle du µm ont été obtenus en arrangeant et connecter électriquement en parallèle 344 cellules CMUT circulaires, suivant une disposition hexagonale. Par conséquent, la résultante 5µm élément-vers-élément distance, c’est-à-dire le trait de scie, correspond à la séparation par membrane-à-membrane. Une représentation schématique de la structure d’un tableau CMUT est signalée dans la Figure 1.
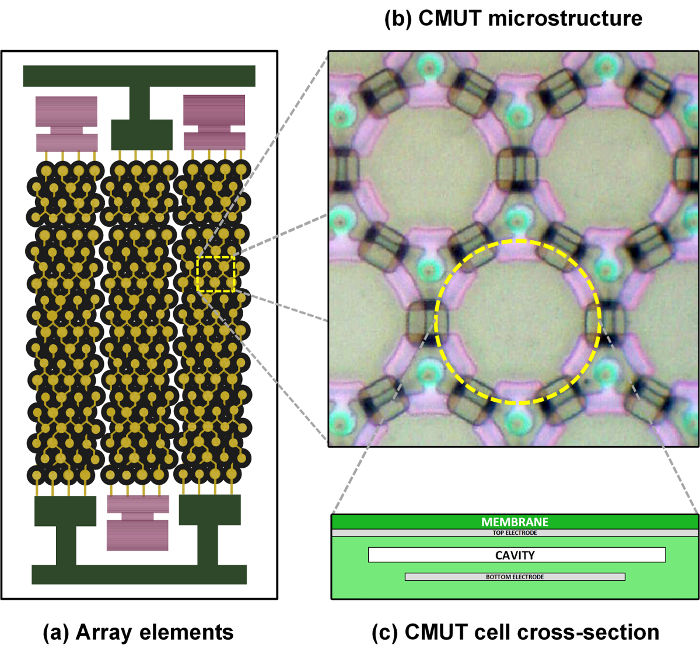
Figure 1 : structure de tableau CMUT. Représentation schématique de la structure d’un tableau CMUT : tableau des éléments composés de plusieurs cellules branchées en parallèle (a), mise en page de la microstructure CMUT (b) ; coupe transversale d’une cellule CMUT (c). S’il vous plaît cliquez ici pour visionner une version agrandie de cette figure.
Le CMUT microfabrication paramètres, c’est-à-dire le latéral et verticales dimensions de la plaque et les électrodes, ont été définis à l’aide de simulations de modélisation éléments finis (FEM) dans le but de réaliser une opération d’immersion à large bande, caractérisée par une réponse en fréquence centrée à 7,5 MHz et une bande passante fractionnelle bidirectionnel 100 %-6 dB. La hauteur de la cavité, c’est-à-dire l’écart, a été définie pour atteindre une tension de l’effondrement de 260 V pour maximiser la sensibilité bidirectionnelle, en biaisant le CMUT à 70 % de la tension de chute4, compte tenu d’une tension de signal d’excitation maximale V 80. Le tableau 1 résume les principaux paramètres géométriques de la microfabriques CMUT.
| Paramètres de conception de tableau CMUT | |
| Paramètre | Valeur |
| Tableau | |
| Nombre d’éléments | 256 |
| Hauteur de l’élément | 200 µm |
| Longueur de l’élément (élévation) | 5 mm |
| Mise au point d’altitude fixe | 15 mm |
| CMUT Microstructure | |
| Diamètre de la cellule | 50 µm |
| Diamètre d’électrode | 34 µm |
| Cellule-cellule distance latérale | 7,5 µm |
| Épaisseur de la plaque | 2,5 µm |
| Hauteur de l’écart | 0,25 µm |
Tableau 1. Paramètres de sonde CMUT. Paramètres géométriques de la sonde linéaire-tableau CMUT et la microstructure de cellule CMUT.
Le processus de conditionnement utilisé pour intégrer le tableau CMUT dans une tête de sonde est décrite dans la référence4. La lentille acoustique a été fabriquée en utilisant un caoutchouc de silicone vulcanisé à température ambiante (RTV) dopé à oxyde métallique Nanopoudres pour correspondre à l’impédance acoustique de l’eau et éviter les réflexions parasites à l’ interface22. Le composé résultant est caractérisé par une densité de 1280 kg/m3 et une vitesse du son de 1100 m/s. Un rayon de courbure de 7 mm a été choisi pour la lentille cylindrique, conduisant à une mise au point géométrique de 18 mm et une épaisseur maximale de 0,5 mm environ au-dessus de la surface du transducteur. Une photo de la tête de sonde CMUT est montrée dans la Figure 2(a).
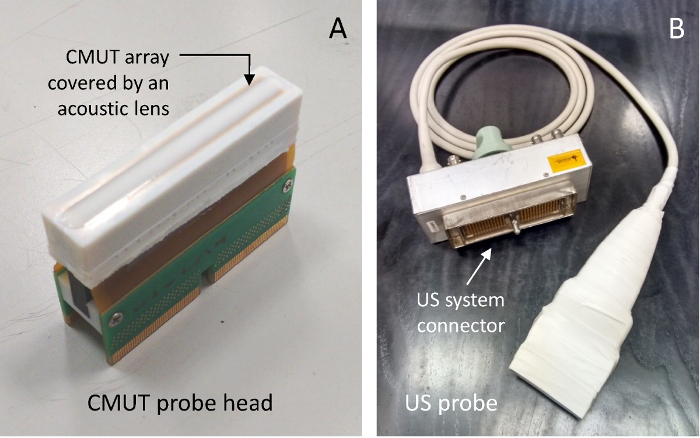
Figure 2 : sonde CMUT. Tête de la sonde CMUT développée, y compris la rangée linéaire de transducteurs et de lentille acoustique (a) et la sonde CMUT complète avec connecteur (b). S’il vous plaît cliquez ici pour visionner une version agrandie de cette figure.
La tête de sonde CMUT est couplée à la poignée de la sonde contenant l’électronique frontal analogique multicanal de réception et un câble multipolaire pour la connexion avec le scanner d’US. Le circuit électronique monocanal est un amplificateur de tension de 9 dB-gain-impédance d’entrée élevée qui fournit l’électricité courant nécessaire pour conduire l’impédance du câble. L’électronique multicanaux, décrit dans référence 4, est issu d’une topologie de circuit incluant un récepteur de faible niveau de bruit ultra-low-power et un commutateur intégré pour la transmission/réception signal impression recto-verso. Le bloc d’alimentation électronique frontal et la tension de polarisation CMUT sont générées par un appareil d’alimentation personnalisée et nourris à la sonde via le câble multipolaire. La sonde complète est indiquée sur la Figure 2(b).
Sondes américaines piézoélectriques
Pour une comparaison qualitative des images obtenues avec la sonde CMUTci-dessus, deux sondes d’US piézoélectriques disponible dans le commerce ont été inclus dans les expériences. Le premier est une sonde linéaire-tableau avec 192 transduction des éléments, un terrain de 245 µm et une largeur de bande fractionnée 110 % centrée à 8 MHz. Cette sonde a été utilisée pour acquérir des images de B-mode 2D. La deuxième sonde est une sonde d’imagerie 3D avec une rangée linéaire balayée mécaniquement de 180 transduction des éléments, avec un terrain de 245 µm et une largeur de bande fractionnée 100 % centré à 8,5 MHz. Un moteur pas à pas placé à l’intérieur de la sonde permet de balayer le réseau linéaire afin d’acquérir des plans multiples, qui peuvent être utilisés pour reconstruire une image 3D du volume numérisé23du logement.
Système d’ULA-OP
L’acquisition d’images aux États-Unis a été réalisée en employant l’ULA-OP système20, qui est un système complet et ouvert US recherche et développement, conçu et réalisé à la microélectronique Systems Design Laboratory de l’Université de Florence, en Italie. Le système ULA-OP peut contrôler, aussi bien dans la transmission (TX) et réception (RX), jusqu’à 64 canaux indépendants reliés par une matrice de commutation d’une sonde américaine avec jusqu’à 192 piézoélectrique ou CMUT transducteurs. L’architecture caractéristiques deux principale de traitement cartes système, une Board Analog (AB) et un Conseil numérique (DB), tous deux contenus dans un rack, qui sont complétées par une alimentation et une pension d’arrière-plan qui contient le connecteur de la sonde et le routage interne tous les composants. L’AB contient le serveur frontal pour les transducteurs de la sonde, en particulier les composants électroniques pour climatisation analogique des 64 canaux et la matrice de commutation programmables qui mappe dynamiquement les canaux TX-RX sur les transducteurs. La DB est en charge de la formation de faisceaux en temps réel, synthétisant les signaux TX et le RX de traitement fait écho pour produire le résultat souhaité (par exemple des images de mode B ou sonogrammes Doppler). Il faut souligner que le système ULA-OP est entièrement configurable, d’où le signal à TX peut être toute forme d’onde arbitraire au sein de la bande passante du système (p. ex. les impulsions de trois niveaux, sine-éclats, grésillements, codes de Huffman, etc.) avec un maximum amplitude de Vpp 180 ; en outre, la stratégie de formation de faisceaux peut être programmée selon les modèles des dernière mise au point (par exemple concentré de vague, multi-line-transmission, onde plane, divergentes des vagues, des poutres de diffraction limitée, etc.)24,25 . Au niveau matériel, ces tâches sont partagées entre les cinq Field Programmable Gate Arrays (FPGA) et un processeur de Signal numérique (DSP). Avec 3D balayée mécaniquement par imagerie de sondes, telles que celle décrite ci-dessus, le système ULA-OP contrôle également le moteur pas à pas à l’intérieur de la sonde, pour l’acquisition synchronisée d’images 2D individuelles à chaque position du transducteur tableau.
Le système ULA-OP peut être reconfiguré en cours d’exécution et adapté aux différentes sondes US. Il communique par un canal d’USB 2.0 avec un ordinateur hôte, équipé d’un logiciel spécifique. Ce dernier dispose d’une interface graphique configurable qui permet la visualisation en temps réel des images US, reconstruit en différents modes ; avec sondes volumétriques, par exemple, deux images de B-mode de plans perpendiculaires du volume numérisé peuvent être affichées en temps réel.
Le principal avantage du système ULA-OP pour l’application du protocole décrit est qu’il permet un réglage facile des paramètres TX-RX et il offre un accès complet à des données collectées à chaque étape dans le traitement de chaîne26, rend également possible du signal pour tester les nouvelles modalités d’imagerie et beamforming techniques27,28,29,30,31,32,33.
Système de suivi de mouvement
Pour enregistrer les États-Unis sonde position au cours de l’acquisition d’images, un système de suivi de mouvement optique était travailleur34. Le système est basé sur une unité de capteur qui émet de la lumière infrarouge par l’intermédiaire de deux projecteurs (diode électroluminescente (LED)) et deux récepteurs (c.-à-d. une lentille et un dispositif à couplage de charge (CCD)) pour détecter la lumière réfléchie par les multiples passif spécifique marqueurs disposés dans des formes rigides prédéfinis. Informations sur la lumière réfléchie sont alors traitées par un processeur embarqué pour calculer la position et l’orientation des données, qui peuvent être transférées à un ordinateur hôte connecté via USB 2.0. Le même lien peut être utilisé pour contrôler la configuration de l’unité de capteur.
L’unité de détection des navires ainsi qu’un ensemble d’outils, chacun doté de quatre marqueurs réfléchissants disposés dans une configuration géométrique rigide. La proposition de système de suivi permet de suivre jusqu’à six outils rigides distincts simultanément, à une fréquence de fonctionnement d’environ 20Hz. Deux de ces outils ont été utilisés pour ces expériences : un outil pointeur, ce qui permet d’acquérir la position 3D touché par son extrémité, et un outil pince équipée, qui peut être attaché à la sonde US sous test (voir Figure 14).
Côté logiciel, le tracker motion dispose d’une bas niveau serial interface de programmation (API) pour les deux unité contrôle et acquisition de données, qui sont accessibles via le port USB. Par défaut, position et orientation est retournées en tant qu’éléments d’entrée multiple, c’est-à-dire une entrée par chaque outil de suivi. Chaque entrée contient une position 3D (x, y, z), exprimé en millimètres et une orientation (q0, q,x, qy, q,z), exprimée comme un quaternion. Le système est également livré avec une panoplie de niveau supérieures instruments logiciels, qui inclut un outil de suivi graphique pour visualiser et mesurer en temps réel les positions/orientations des outils multiples dans le champ de vision de l’unité de capteur.
Composants du système overview, intégration et logiciels
Le schéma de la Figure 3 résume les instruments adoptés pour le protocole, décrivant aussi le flux de données qui coule à travers les systèmes.
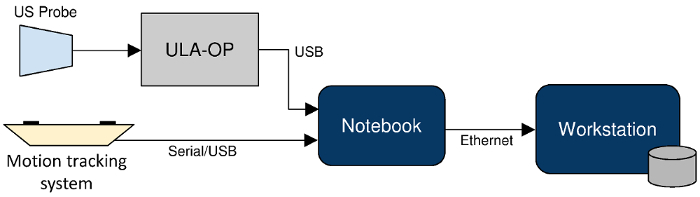
Figure 3 : schéma fonctionnel de l’intégration de système et installation de tout matériel. La sonde américaine est connectée au système ULA-OP qui communique via le port USB avec l’ordinateur portable pour l’acquisition d’images aux États-Unis. Dans le même temps, l’ordinateur portable est aussi connecté via USB pour le système d’acquisition de données de position, de suivi de mouvement et via Ethernet au poste de travail, traitement des données. S’il vous plaît cliquez ici pour visionner une version agrandie de cette figure.
Outre les sondes américaines, le dispositif de suivi de mouvement et le système ULA-OP, qui ont été décrites ci-dessus, le programme d’installation comprend également deux ordinateurs, à savoir un ordinateur portable et une station de travail. Le premier est le principal front-end à l’instrumentation, de recevoir et de synchroniser les deux flux de données entrant principal : les images d’Américains venant du système ULA-OP et la 3D positionnement des données depuis le tracker de la motion. Il fournit également une rétroaction visuelle à l’opérateur pour les images acquises. La station de travail a considérablement plus élevée capacité de puissance et stockage computationnelle. Il prend en charge dorsal après traitement d’image et un référentiel pour les ensembles de données d’imagerie combinée. La station de travail est également utiliséepour la visualisation des images américaines et Monsieur, y compris la possibilité de visualisation 3D simultanée d’images multimodales enregistrés.
Une exigence essentielle pour les expériences d’acquisition image est la synchronisation des deux courants principaux de données. Le suivi de mouvement et les systèmes de ULA-OP sont des instruments indépendants qui ne supportent pas encore une synchronisation explicite des activités. Pour cette raison, informations données et position d’image US doivent être correctement combinés pour détecter la position 3D correcte de la sonde américaine au moment où chaque tranche de l’image a été acquise. Pour cela, une application de journalisation spécifique a été développée pour l’enregistrement et l’horodatage en temps réel les données fournies par le mouvement de système, de suivi de modification d’un composant de logiciel C++ qui est inclus, dans ce cas, dans le tracker de la requête elle-même. En règle générale, les systèmes de suivi de mouvement disposent d’une API de bas niveau qui permet la capture de données en temps réel et de les transcrire dans un fichier.
La méthode de synchronisation adopté fonctionne comme suit. Chaque entrée dans le fichier produit par l’application de journalisation est augmentée avec un horodatage dans le format « AAAA-MM-ddThh:mm:ss.kkk », où : y = année, M = mois, d = jours, h = heures, m = minute, s = deuxième, k = “milliseconde”. Le logiciel PC ULA-OP (langages de programmation C++ et MATLAB) calcule de début et fin des temps de chaque séquence d’acquisition image et stocke ces informations dans chaque image au format .vtk. Afin de fournir une référence temporelle commune au cours des expériences, les procédures logiciel ci-dessus sont exécutés sur l’ordinateur frontal à la Figure 3. Horodateurs produites de cette façon sont ensuite utilisées par les procédures logiciel post-traitement qui produisent le dataset final (voir le protocole, l’article 8).
Un autre composant de logiciel spécifique a été réalisé et exécuter sur le poste de travail à fournir une rétroaction en temps réel à l’exploitant, en comparant l’actuel US sonde mesure d’images RM et, en particulier, de l’ensemble de poses prédéfinies. Une routine de logiciel côté serveur en Python traite le fichier journal de motion tracker, traduit le courant américain probe position dans une forme géométrique et envoie les données vers un serveur Paraview. Un client de Paraview connecte sur le même serveur Paraview et affiche en temps réel la position de la forme géométrique, superposée sur une image de Monsieur et d’autres formes géométriques décrivant les poses prédéfinies. Un exemple de la visualisation en temps réel qui en résulte est illustré à la Figure 17.
