छोटे और पोर्टेबल अल्ट्रासाउंड (अमेरिका) स्कैनर के लिए बढ़ते बाजार में नए echographic जांच के विकास के लिए अग्रणी है जो संकेत के भाग में कंडीशनिंग और beamforming इलेक्ट्रॉनिक्स जांच संभाल में एकीकृत है, विशेष रूप से 3 डी/ 1. उभरते प्रौद्योगिकियों विशेष रूप से एकीकरण के इस उच्च स्तर को प्राप्त करने के लिए अनुकूल Micromachined अल्ट्रासोनिक ट्रांसड्यूसर (MUTs)2, माइक्रो इलेक्ट्रो यांत्रिक प्रणाली (एमईएमएस) सिलिकॉन पर गढ़े ट्रांसड्यूसर के एक वर्ग शामिल हैं । विशेष रूप से, समाई MUTs (CMUTs) अंत में एक तकनीकी परिपक्वता है कि उंहें अगली पीढ़ी अल्ट्रासाउंड इमेजिंग सिस्टम3के लिए piezoelectric ट्रांसड्यूसर के लिए एक वैध विकल्प है पहुंच गया है । CMUTs बहुत माइक्रोइलेक्ट्रॉनिक प्रौद्योगिकियों, व्यापक बैंडविड्थ के साथ उनकी अनुकूलता के कारण अपील कर रहे है-जो एक उच्च छवि संकल्प पैदावार उच्च थर्मल दक्षता और, सब से ऊपर, उच्च संवेदनशीलता4। ENIAC जू परियोजना DeNeCoR के संदर्भ में (NeuroControl और NeuroRehabilitation के लिए उपकरणों)5, CMUT जांच6 विकसित किया जा रहा है के लिए हमारे मस्तिष्क इमेजिंग अनुप्रयोगों (जैसे न्यूरोसर्जरी), जहां उच्च गुणवत्ता 2d/3d/4d छवियों और मस्तिष्क संरचनाओं के सटीक प्रतिनिधित्व की आवश्यकता है ।
नई अमेरिकी जांच के विकास की प्रक्रिया में, इमेजिंग प्रदर्शन के प्रारंभिक आकलन प्रदर्शन की संभावना मौलिक है । ठेठ मूल्यांकन तकनीक संकल्प और इसके विपरीत जैसे विशिष्ट मापदंडों को मापने शामिल, ज्ञात ज्यामिति और echogenicity के एंबेडेड लक्ष्य के साथ ऊतक नकल करने वाले प्रेतों की छवियों पर आधारित है । आवेदन विशिष्ट इमेजिंग लक्ष्य के साथ और अधिक यथार्थवादी विश्लेषण एक विशिष्ट नैदानिक क्षेत्र के लिए अपने संभावित आवेदन में अमेरिका की जांच की उंमीद प्रदर्शन के एक प्रारंभिक आकलन के लिए अत्यंत मूल्यवान हो सकता है । दूसरी ओर, अधिग्रहणों की पूरी पुनरावर्तन समय पर विभिंन विंयास के तुलनात्मक परीक्षण के लिए मौलिक है, और इस आवश्यकता को पूरी तरह से vivo प्रयोगों में नियम ।
नैदानिक इमेजिंग तकनीक पर साहित्य में कई काम करता है पूर्व vivo पशु नमूनों के प्रयोग का प्रस्ताव7, शव दिमाग8, या ऊतक नकल उतारने9 अलग प्रयोजनों के लिए10, जो शामिल इमेजिंग विधियों, पंजीकरण एल्गोरिदम, चुंबकीय अनुनाद (श्री) दृश्यों, या अमेरिका बीम पैटर्न और जिसके परिणामस्वरूप छवि गुणवत्ता का परीक्षण । उदाहरण के लिए, ब्रेन इमेजिंग, Lazebnik एट अल के संदर्भ में । 7 एक formalin-फिक्स्ड भेड़ मस्तिष्क एक नया 3 डी श्री पंजीकरण विधि का मूल्यांकन करने के लिए इस्तेमाल किया; इसी तरह Choe एट अल. 11 एक निश्चित उल्लू बंदर मस्तिष्क के श्री और प्रकाश माइक्रोस्कोपी छवियों के पंजीकरण के लिए एक प्रक्रिया की जांच की । एक polyvinyl शराब (PVA) मस्तिष्क प्रेत9 में विकसित किया गया था और पंजीकरण के परीक्षण के लिए एक साझा छवि dataset उत्पन्न करने के लिए (यानी श्री, अमेरिका, और गणना टोमोग्राफी) multimodal छवि अधिग्रहण प्रदर्शन करने के लिए12 और इमेजिंग एल्गोरिदम ।
कुल मिलाकर, इन अध्ययनों की पुष्टि करते है कि छवि अधिग्रहण के लिए एक यथार्थवादी लक्ष्य का उपयोग वास्तव में एक नई इमेजिंग तकनीक के विकास के दौरान एक आवश्यक कदम है । यह एक और भी महत्वपूर्ण चरण का प्रतिनिधित्व करता है जब एक नया इमेजिंग डिवाइस डिजाइनिंग, CMUT अमेरिका की जांच इस पत्र में प्रस्तुत की तरह है, जो एक प्रोटोटाइप चरण में अभी भी है और व्यापक और समय पर प्रतिलिपि परीक्षण की जरूरत है, सभी डिजाइन की एक सटीक ट्यूनिंग के लिए अपने अंतिम बोध और vivo अनुप्रयोगों में (के रूप में13,14,15) में संभावित सत्यापन से पहले पैरामीटर ।
इस कार्य में वर्णित प्रायोगिक प्रोटोकॉल को CMUT प्रौद्योगिकी के आधार पर नव-विकसित अमेरिकी जांचों के लिए एक सुदृढ़, आवेदन-विशिष्ट इमेजिंग मूल्यांकन प्रक्रिया प्रदान करने के लिए बनाया गया है । दोनों यथार्थवाद और दोहराया, गोजातीय दिमाग (मानक खाद्य आपूर्ति वाणिज्यिक श्रृंखला के माध्यम से प्राप्त) formalin में तय सुनिश्चित करने के लिए इमेजिंग लक्ष्य के रूप में चुना गया था । निर्धारण प्रक्रिया में हम दोनों और श्री इमेजिंग16,17में संतोषजनक रूपात्मक गुण और दृश्यता गुणों को बनाए रखते हुए ऊतक विशेषताओं के दीर्घकालिक संरक्षण की गारंटी देता है ।
अमेरिका छवि गुणवत्ता के आकलन के लिए प्रोटोकॉल यहां भी वर्णित एक neuronavigation न्यूरोसर्जरी के लिए इस्तेमाल किया तकनीक से उधार सुविधा लागू करता है15। इस तरह के दृष्टिकोण में, अमेरिका की जांच एक प्रस्ताव ट्रैकिंग प्रणाली है कि स्थानिक स्थिति और वास्तविक समय में अभिविन्यास डेटा प्रदान करता है से जुड़े हुए हैं । इस तरह, अमेरिका के शल्य चिकित्सा गतिविधियों के दौरान अधिग्रहीत छवियों को स्वचालित रूप से पंजीकृत किया जा सकता है और कल्पना, मार्गदर्शन के लिए, superposition में रोगी के मस्तिष्क के पूर्व संचालक श्री छवियों के लिए । प्रस्तुत प्रोटोकॉल के प्रयोजनों के लिए, श्री छवियों के साथ superposition (जो ब्रेन इमेजिंग में स्वर्ण मानक के रूप में माना जाता है) महान मूल्य की है, क्योंकि यह मानव विशेषज्ञों नेत्रहीन आकलन करने के लिए जो रूपात्मक और ऊतक सुविधाओं में पहचानने योग्य है की अनुमति देता है अमेरिका छवियां और, इसके विपरीत, इमेजिंग कलाकृतियों की उपस्थिति को पहचानने के लिए ।
विभिंन अमेरिकी जांच के साथ प्राप्त छवियों की तुलना करने की संभावना और भी दिलचस्प हो जाता है । प्रायोगिक प्रोटोकॉल प्रस्तुत संभावना को स्थानिक संदर्भ का एक सेट को परिभाषित करने के लिए अमेरिका के अधिग्रहण के लिए बन गया है, सबसे सुविधा संपंन मात्रा श्री छवियों के एक प्रारंभिक दृश्य निरीक्षण में पहचान क्षेत्रों पर ध्यान केंद्रित शामिल है । एक एकीकृत दृश्य उपकरण, Paraview ओपन सोर्स सॉफ्टवेयर सिस्टम18के लिए विकसित, हमें छवि अधिग्रहण चरणों के दौरान ऐसे पूर्वनिर्धारित बन गया मिलान के लिए ऑपरेटरों के लिए मार्गदर्शन प्रदान करता है । अंशांकन प्रोटोकॉल द्वारा आवश्यक प्रक्रियाओं के लिए, यह सभी लक्ष्य नमूनों से लैस करने के लिए मौलिक है-या तो जैविक या सिंथेटिक-पूर्वनिर्धारित स्थान स्थलों कि अस्पष्ट स्थानिक संदर्भ प्रदान के साथ । इस तरह के स्थलों दोनों हमें और श्री छवियों में दिखाई और शारीरिक रूप से गति पर नज़र रखने प्रणाली के साथ बनाया माप के लिए सुलभ होना चाहिए । प्रयोग के लिए चुना मील का पत्थर तत्वों चकमक कांच, दोनों हमें और श्री छवियों में जिनकी दृश्यता के छोटे क्षेत्रों रहे है19 साहित्य में प्रदर्शन किया और प्रारंभिक हमें और श्री स्कैन प्रस्तुत प्रयोगों से पहले प्रदर्शन की पुष्टि की थी ।
प्रोटोकॉल प्रस्तुत अल्ट्रासाउंड उंनत खुला मंच (ुला-OP)20, एक पूर्ण और खुला अनुसंधान और अमेरिका छवि अधिग्रहण, जो व्यावसायिक रूप से उपलब्ध की तुलना में बहुत व्यापक प्रयोगात्मक संभावनाओं के लिए विकास प्रणाली पर निर्भर करता है स्कैनर और विभिंन अमेरिकी जांच के मूल्यांकन के लिए एक आम आधार के रूप में कार्य करता है ।
सबसे पहले, इस काम में प्रयुक्त उपकरणों, नए डिजाइन CMUT जांच करने के लिए विशेष संदर्भ के साथ वर्णित हैं । प्रायोगिक प्रोटोकॉल परिचय हैduced विस्तार से, प्रारंभिक डिजाइन से प्रणाली अंशांकन करने के लिए, छवि अधिग्रहण और बाद प्रसंस्करण के लिए शामिल सभी प्रक्रियाओं का एक गहन विवरण के साथ । अंत में, प्राप्त चित्र प्रस्तुत कर रहे है और परिणाम पर चर्चा कर रहे हैं, एक साथ इस काम के भविष्य के घटनाक्रम के लिए संकेत के साथ ।
इंस्ट्रूमेंटेशन
CMUT जांच प्रोटोटाइप
प्रयोगों से बाहर किया गया एक नव विकसित २५६-तत्व CMUT रैखिक सरणी प्रोटोटाइप, डिजाइन, गढ़े, और Acoustoelectronics प्रयोगशाला (ACULAB) में पैक रोमा Tre विश्वविद्यालय (रोम, इटली), CMUT रिवर्स निर्माण की प्रक्रिया का उपयोग ( आरएफपी)4. आरएफपी एक microfabrication और पैकेजिंग प्रौद्योगिकी है, विशेष रूप से अमेरिका इमेजिंग अनुप्रयोगों के लिए एमईएमएस ट्रांसड्यूसर की प्राप्ति के लिए कल्पना की, जिससे CMUT microstructure सिलिकॉन पर एक “उल्टा” दृष्टिकोण के बाद निर्मित है21। अंय CMUT निर्माण प्रौद्योगिकियों की तुलना में, आरएफपी पैदावार में सुधार इमेजिंग CMUT कोशिकाओं के उच्च एकरूपता के कारण प्रदर्शन के लिए पूरे सरणी पर ज्यामिति, और जांच सिर पैकेज में ध्वनिक इंजीनियर सामग्री के उपयोग के लिए । आरएफपी की एक महत्वपूर्ण विशेषता यह है कि बिजली के संबंध पैड CMUT मर जाते हैं, जो 2d arrays और सामने के अंत मल्टी चैनल इलेक्ट्रॉनिक्स के 3 डी एकीकरण को आसान बनाता है के पीछे के भाग पर स्थित हैं ।
२५६-तत्व CMUT सरणी ७.५ मेगाहर्ट्ज पर केंद्रित एक आवृत्ति बैंड में संचालित करने के लिए डिज़ाइन किया गया था. २०० µm के एक तत्व पिच ५१.२ mm की एक अधिकतम क्षेत्र-दृश्य चौड़ाई में जिसके परिणामस्वरूप सरणी के लिए चुना गया था । एकल CMUT सरणी तत्वों की ऊंचाई पार्श्व संकल्प और प्रवेश की क्षमता के मामले में उपयुक्त प्रदर्शन को प्राप्त करने के लिए परिभाषित किया गया था । एक 5 मिमी सरणी तत्व ऊंचाई के लिए एक ध्वनिक लेंस के माध्यम से 18 मिमी की गहराई पर उंनयन ध्यान फिक्सिंग जब ०.१ mm और ७.५ मेगाहर्ट्ज, १.८ mm की एक-3 डीबी गहराई में से एक-3 db बीम चौड़ाई प्राप्त करने के लिए चुना गया था । १९५ µm-वाइड सरणी तत्वों की व्यवस्था और विद्युत समानांतर ३४४ परिपत्र CMUT कोशिकाओं में जोड़ने, एक षट्कोण लेआउट के बाद से प्राप्त किया गया । फलस्वरूप, परिणामस्वरूप ५ µm तत्व-से-तत्व दूरी, अर्थात kerf, झिल्ली-से-झिल्ली जुदाई से मेल खाती है. CMUT सरणी की संरचना का एक योजनाबद्ध प्रस्तुतिकरण चित्र 1में रिपोर्ट की गई है ।
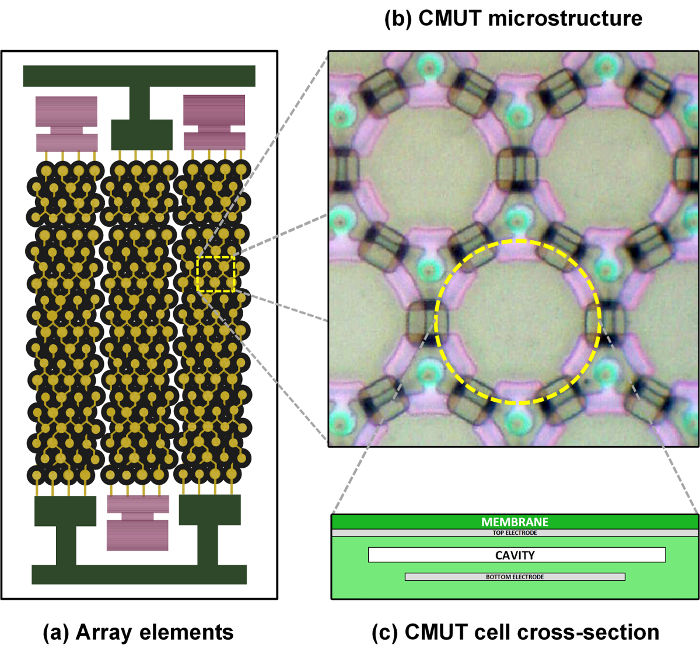
चित्र 1: सरणी संरचना CMUT. एक CMUT सरणी की संरचना का योजनाबद्ध प्रतिनिधित्व: सरणी तत्वों के समानांतर में जुड़े कई कोशिकाओं से बना (a), लेआउट CMUT microstructure (b); एक CMUT सेल (सी) के पार अनुभाग । कृपया यहां क्लिक करें इस आंकड़े का एक बड़ा संस्करण को देखने के लिए ।
CMUT microfabrication पैरामीटर, यानी प्लेट और इलेक्ट्रोड के पार्श्व और ऊर्ध्वाधर आयामों, एक ब्रॉडबैंड विसर्जन आपरेशन प्राप्त करने के उद्देश्य के साथ परिमित तत्व मॉडलिंग (फेम) सिमुलेशन का उपयोग कर परिभाषित किया गया, एक की विशेषता आवृत्ति प्रतिक्रिया ७.५ मेगाहर्ट्ज और एक १००%-6 dB दो तरह आंशिक बैंडविड्थ पर केंद्रित । गुहा की ऊंचाई, यानी अंतर, के पतन वोल्टेज को प्राप्त करने के लिए परिभाषित किया गया था २६० v दो तरह से संवेदनशीलता को अधिकतम करने के लिए, पतन वोल्टेज4के ७०% पर CMUT पूर्वाग्रह से, एक ८० वी अधिकतम उत्तेजना संकेत वोल्टेज पर विचार. तालिका 1 microfabricated CMUT के मुख्य ज्यामितीय पैरामीटर्स को सारांशित करता है ।
| CMUT सरणी डिज़ाइन पैरामीटर्स | |
| पैरामीटर | मान |
| सरणी | |
| तत्वों की संख्या | २५६ |
| तत्व पिच | २०० µm |
| तत्व लंबाई (ऊंचाई) | 5 मिमी |
| निश्चित उंनयन फोकस | 15 एमएम |
| CMUT Microstructure | |
| सेल व्यास | ५० µm |
| इलेक्ट्रोड व्यास | ३४ µm |
| कक्ष-से-कक्ष पार्श्व दूरी | ७.५ µm |
| प्लेट मोटाई | २.५ µm |
| अंतर ऊंचाई | ०.२५ µm |
तालिका 1. CMUT जांच पैरामीटर । CMUT रैखिक-सरणी जांच और CMUT सेल microstructure के ज्यामितीय मानकों ।
जांच head में CMUT सरणी को एकीकृत करने के लिए उपयोग की गई पैकेजिंग प्रक्रिया संदर्भ4में बताई गई है । ध्वनिक लेंस एक कमरे के तापमान vulcanized (RTV) सिलिकॉन रबर धातु ऑक्साइड nanopowders के साथ मैगनीज पानी की ध्वनिक प्रतिबाधा मैच और22अंतरफलक पर नकली प्रतिबिंब से बचने का उपयोग कर निर्मित किया गया था । परिणामस्वरूप यौगिक १२८० किग्रा/एम3 और ११०० मी की ध्वनि की गति के घनत्व की विशेषता थी । एक 7 मिमी वक्रता त्रिज्या बेलनाकार लेंस के लिए चुना गया था, 18 मिमी और transducer सतह के ऊपर लगभग ०.५ मिमी की एक अधिकतम मोटाई के एक ज्यामितीय ध्यान केंद्रित करने के लिए अग्रणी । CMUT जांच सिर की एक तस्वीर चित्रा 2(ए)में दिखाया गया है ।
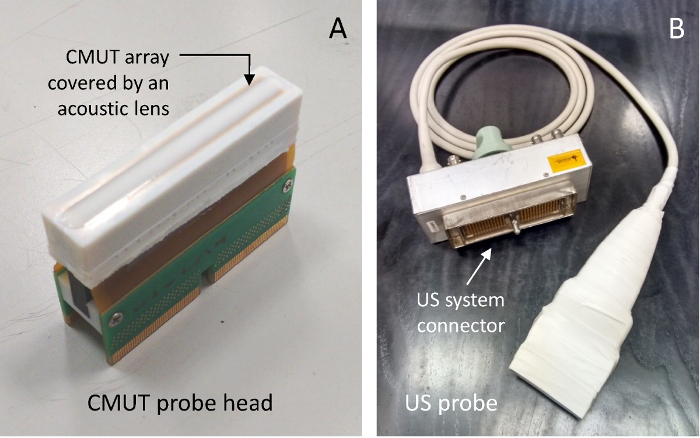
चित्रा 2: CMUT जांच । विकसित CMUT जांच के सिर, ट्रांसड्यूसर और ध्वनिक लेंस (ए) के रैखिक सरणी सहित, और कनेक्टर के साथ पूर्ण CMUT जांच (ख) । कृपया यहां क्लिक करें इस आंकड़े का एक बड़ा संस्करण को देखने के लिए ।
CMUT जांच सिर मल्टीचैनल रिसेप्शन एनालॉग सामने अंत इलेक्ट्रॉनिक्स और अमेरिका स्कैनर के लिए कनेक्शन के लिए एक multipolar केबल युक्त जांच संभाल करने के लिए युग्मित किया गया था । एक चैनल इलेक्ट्रॉनिक सर्किट एक उच्च इनपुट-प्रतिबाधा 9 डीबी-लाभ वोल्टेज एम्पलीफायर है कि विद्युत वर्तमान केबल प्रतिबाधा ड्राइव करने के लिए आवश्यक प्रदान करता है. मल्टीचैनल इलेक्ट्रॉनिक्स, संदर्भ में वर्णित 4, एक सर्किट टोपोलॉजी पर आधारित है जिसमें एक अल्ट्रा कम बिजली कम शोर रिसीवर और एक एकीकृत स्विच के लिए संचारित/प्राप्त संकेत डुप्लेक्स । सामने के अंत इलेक्ट्रॉनिक्स बिजली की आपूर्ति और CMUT पूर्वाग्रह वोल्टेज एक कस्टम बिजली की आपूर्ति इकाई द्वारा उत्पंन और multipolar केबल के माध्यम से जांच करने के लिए खिलाया जाता है । पूरी जांच चित्रा 2(बी)में दिखाया गया है ।
Piezoelectric अमेरिकी जांच
CMUT जांच के साथ प्राप्त छवियों की गुणात्मक तुलना के लिएइसके बाद के संस्करण, दो व्यावसायिक रूप से उपलब्ध piezoelectric अमेरिकी जांच प्रयोगों में शामिल थे । पहले एक १९२ transducing तत्वों, एक २४५ µm पिच, और एक ११०% आंशिक बैंडविड्थ 8 मेगाहर्ट्ज पर केंद्रित के साथ एक रैखिक सरणी जांच है । यह जांच 2 डी बी मोड छवियों को प्राप्त करने के लिए इस्तेमाल किया गया था । दूसरी जांच 3 डी इमेजिंग के लिए एक यांत्रिक रूप से १८० transducing तत्वों के रेखीय सरणी बह के साथ एक जांच, २४५ µm पिच और एक १००% आंशिक बैंडविड्थ ८.५ मेगाहर्ट्ज पर केंद्रित के साथ है । जांच आवास के अंदर रखा एक stepper मोटर एकाधिक विमानों, जो स्कैन की गई मात्रा23की एक 3 डी छवि को फिर से संगठित करने के लिए इस्तेमाल किया जा सकता प्राप्त करने के लिए रैखिक सरणी व्यापक सक्षम बनाता है ।
ुला-सेशन सिस्टम
अमेरिकी छवियों के अधिग्रहण ुला-OP सिस्टम20है, जो एक पूर्ण और खुला अमेरिकी अनुसंधान और विकास प्रणाली, डिजाइन और फ्लोरेंस, इटली के विश्वविद्यालय के माइक्रोइलेक्ट्रॉनिक सिस्टम डिजाइन प्रयोगशाला में महसूस किया है रोजगार से बाहर किया गया था । ुला-OP प्रणाली को नियंत्रित कर सकते हैं, दोनों संचरण में (TX) और रिसेप्शन (RX), अप करने के लिए ६४ स्वतंत्र चैनलों के माध्यम से जुड़े एक स्विच मैट्रिक्स के साथ एक अमेरिकी जांच करने के लिए १९२ piezoelectric या CMUT ट्रांसड्यूसर. सिस्टम वास्तुकला दो मुख्य प्रसंस्करण बोर्डों, एक एनालॉग बोर्ड (अटल बिहारी) और एक डिजिटल बोर्ड (DB), दोनों एक रैक है, जो एक बिजली की आपूर्ति बोर्ड और एक वापस विमान बोर्ड है कि जांच संबंधक और सभी आंतरिक रूटिंग शामिल द्वारा पूरा कर रहे है में निहित सुविधाएं घटक. अटल बिहारी जांच ट्रांसड्यूसर को सामने अंत होता है, विशेष रूप से ६४ चैनलों और प्रोग्राम स्विच मैट्रिक्स के अनुरूप कंडीशनिंग के लिए इलेक्ट्रॉनिक उपकरणों में है कि नक्शे गतिशील TX-RX ट्रांसड्यूसर को चैनल । DB वास्तविक समय beamforming के आरोप में है, TX संकेतों synthesizing और RX के प्रसंस्करण के लिए वांछित उत्पादन (उदाहरण के लिए बी-मोड छवियों या डॉपलर sonograms) उत्पादन गूंज. यह है कि ुला-सेशन प्रणाली पूरी तरह से विंयास योग्य है, इसलिए TX में संकेत प्रणाली बैंडविड्थ (जैसे तीन स्तर दालों, ज्या-फटने, चूं, Huffman कोड, आदि) के भीतर किसी भी मनमाने ढंग से तरंग हो सकता है के लायक है एक अधिकतम १८० Vpp के आयाम; इसके अलावा, beamforming रणनीति नवीनतम ध्यान केंद्रित पैटर्न के अनुसार क्रमादेशित किया जा सकता है (जैसे ध्यान केंद्रित लहर, बहु लाइन-संचरण, विमान की लहर, लहरों हटाना, सीमित विवर्तन बीम, आदि)24,25 . हार्डवेयर स्तर पर, ये कार्य पांच फ़ील्ड प्रोग्राम गेट सरणियों (FPGAs) और एक डिजिटल सिग्नल प्रोसेसर (डीएसपी) के बीच साझा किए गए हैं । साथ यांत्रिक-बह 3 डी इमेजिंग जांच, इस तरह के ऊपर वर्णित एक के रूप में, ुला-सेशन प्रणाली भी जांच के अंदर stepper मोटर नियंत्रण, transducer सरणी के प्रत्येक स्थिति में व्यक्तिगत 2d फ्रेम के सिंक्रनाइज़ अधिग्रहण के लिए ।
ुला-सेशन प्रणाली को चलाने के समय में फिर से विंयस्त किया जा सकता है और विभिंन अमेरिकी जांच के लिए अनुकूलित । यह एक मेजबान कंप्यूटर, एक विशिष्ट सॉफ्टवेयर उपकरण के साथ सुसज्जित के साथ एक यूएसबी २.० चैनल के माध्यम से संचार । उत्तरार्द्ध एक विन्यास ग्राफिकल इंटरफेस है कि अमेरिका छवियों का वास्तविक समय दृश्य प्रदान करता है, विभिन्न मोड में खंगाला गया है; उदाहरण के लिए, volumetric जांच के साथ, स्कैन मात्रा में सीधा विमानों के दो बी मोड छवियों वास्तविक समय में प्रदर्शित किया जा सकता है ।
वर्णित प्रोटोकॉल के प्रयोजनों के लिए ुला सेशन प्रणाली का मुख्य लाभ यह है कि यह TX-RX मापदंडों की एक आसान ट्यूनिंग की अनुमति देता है और यह संकेत डेटा प्रसंस्करण श्रृंखला में प्रत्येक चरण में एकत्र करने के लिए पूर्ण पहुँच प्रदान करता है26, यह भी संभव बनाने नई इमेजिंग मोडलों और beamforming तकनीकों का परीक्षण करने के लिए27,28,29,30,31,३२,३३।
गति ट्रैकिंग प्रणाली
छवि अधिग्रहण के दौरान अमेरिकी जांच की स्थिति रिकॉर्ड करने के लिए, एक ऑप्टिकल मोशन ट्रैकिंग सिस्टम३४कार्यरत था । प्रणाली एक संवेदक इकाई है कि दो प्रबुद्ध (प्रकाश उत्सर्जक डायोड (एल ई डी) के माध्यम से अवरक्त प्रकाश का उत्सर्जन करता है पर आधारित है) और दो रिसीवर (यानी एक लेंस और एक चार्ज-युग्मित डिवाइस (सीसीडी)) का उपयोग करने के लिए प्रकाश का पता लगाने के कई उद्देश्य विशिष्ट निष्क्रिय द्वारा प्रतिबिंबित मार्कर पूर्वनिर्धारित कठोर आकार में व्यवस्थित । प्रतिबिंबित प्रकाश के बारे में जानकारी तो एक ऑन-बोर्ड CPU द्वारा संसाधित है दोनों स्थिति और अभिविन्यास डेटा, जो एक मेजबान कंप्यूटर USB २.० के माध्यम से जुड़ा स्थानांतरित किया जा सकता है की गणना करने के लिए । इसी कड़ी में सेंसर यूनिट के विन्यास को नियंत्रित किया जा सकता है.
सेंसर यूनिट उपकरणों का एक सेट के साथ एक साथ जहाजों, एक कठोर ज्यामितीय विन्यास में व्यवस्थित चार चिंतनशील मार्कर के साथ प्रत्येक संपन्न. गति ट्रैकिंग प्रणाली लगभग 20 हर्ट्ज के एक काम की आवृत्ति पर, छह अलग कठोर उपकरणों के लिए एक साथ ट्रैक कर सकते हैं. दो ऐसे उपकरणों इन प्रयोगों के लिए इस्तेमाल किया गया: एक सूचक उपकरण है, कि 3 डी अपनी टिप से छुआ स्थिति प्राप्त करने की अनुमति देता है, और एक क्लैंप-सुसज्जित उपकरण, कि परीक्षण के तहत अमेरिका की जांच करने के लिए संलग्न किया जा सकता है ( चित्रा 14देखें) ।
सॉफ्टवेयर पक्ष पर, गति ट्रैकर USB के माध्यम से पहुँचा जा सकता है कि दोनों इकाई नियंत्रण और डेटा अधिग्रहण के लिए एक निम्न स्तर धारावाहिक आवेदन प्रोग्रामिंग इंटरफेस (एपीआई) सुविधाएँ. डिफ़ॉल्ट रूप से, स्थिति और ओरिएंटेशन बहु-प्रविष्टि आइटम के रूप में दिए जाते हैं, अर्थात प्रत्येक उपकरण के प्रति एक प्रविष्टि ट्रैक की जा रही है । प्रत्येक प्रविष्टि में एक 3d स्थिति (x, y, z) में व्यक्त mm और एक ओरिएंटेशन (q0, qx, qy, qz) एक quaternion के रूप में व्यक्त होता है । प्रणाली भी उच्च स्तर के सॉफ्टवेयर उपकरण है, जो visualizing और वास्तविक समय में स्थिति को मापने के लिए एक ग्राफिक ट्रैकिंग उपकरण शामिल है के एक उपकरण बॉक्स के साथ आता है और कई उपकरणों की स्थितियों/
सिस्टम ओवरव्यू, एकीकरण और सॉफ़्टवेयर घटक
आरेख चित्रा 3 में प्रोटोकॉल के लिए अपनाई गई इंस्ट्रूमेंटेशन को सारांशित करता है, जो सिस्टम में प्रवाहित डेटा स्ट्रीम का भी वर्णन करती है ।
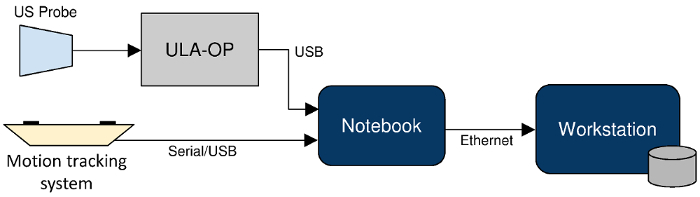
चित्र 3: पूरे हार्डवेयर सेटअप और सिस्टम एकीकरण का ब्लॉक आरेख। यूएस जांच ुला-सेशन सिस्टम से जुड़ा है जो यूएस इमेज अधिग्रहण के लिए नोटबुक के साथ यूएसबी के जरिए संवाद करता है । एक ही समय में, नोटबुक भी गति ट्रैकिंग प्रणाली के लिए यूएसबी के माध्यम से जुड़ा हुआ है, स्थिति डेटा अधिग्रहण के लिए, और ईथरनेट के माध्यम से कार्य केंद्र के लिए, डेटा प्रोसेसिंग के लिए । कृपया यहां क्लिक करें इस आंकड़े का एक बड़ा संस्करण को देखने के लिए ।
इसके अलावा अमेरिका की जांच, गति ट्रैकर, और ुला-सेशन प्रणाली है, जो ऊपर वर्णित किया गया है, सेटअप भी दो कंप्यूटर, अर्थात् एक नोटबुक और एक कार्य केंद्र शामिल हैं । पूर्व मुख्य सामने-इंस्ट्रूमेंटेशन के लिए अंत है, प्राप्त करने और दो मुख्य आने वाली डेटा धाराओं तुल्यकालन: अमेरिका ुला-सेशन प्रणाली और गति ट्रैकर से 3 डी पोजीशनिंग डेटा से आ रही छवियां । यह भी प्राप्त किया जा रहा छवियों के लिए ऑपरेटर के लिए एक दृश्य प्रतिक्रिया प्रदान करता है । कार्यस्थान काफी अधिक गणना शक्ति और भंडारण क्षमता है । यह छवि पोस्ट-प्रोसेसिंग और संयुक्त इमेजिंग डेटासेट के लिए एक रिपॉसिटरी के लिए बैक-एंड समर्थन प्रदान करता है । कार्यस्थान भी उपयोग किया जाता हैहमारे और श्री छवियों के दृश्य के लिए, पंजीकृत बहु मॉडल छवियों के एक साथ 3 डी दृश्य की संभावना भी शामिल है ।
छवि प्राप्ति प्रयोगों के लिए एक महत्वपूर्ण आवश्यकता दो मुख्य डेटा स्ट्रीम का सिंक्रनाइज़ेशन है. मोशन ट्रैकिंग और ुला-सेशन सिस्टम स्वतंत्र उपकरणों है कि अभी तक गतिविधियों का एक स्पष्ट तुल्यकालन का समर्थन नहीं कर रहे हैं । इस के कारण, अमेरिका छवि डेटा और स्थिति की जानकारी के लिए ठीक से समय प्रत्येक छवि टुकड़ा हासिल किया गया था पर अमेरिका की जांच के सही 3 डी स्थिति का पता लगाने के लिए संयुक्त होने की जरूरत है । इस प्रयोजन के लिए, एक विशिष्ट लॉगिंग आवेदन रिकॉर्डिंग और गति ट्रैकिंग प्रणाली द्वारा आपूर्ति की गई डेटा वास्तविक समय में टाइमस्टैंप के लिए विकसित किया गया है, एक C++ सॉफ्टवेयर घटक है कि शामिल है संशोधित करके, इस मामले में, गति ट्रैकर में ही । आम तौर पर, गति ट्रैकिंग सिस्टम एक कम स्तर एपीआई कि वास्तविक समय में डेटा पर कब्जा करने की अनुमति देता है और उंहें एक फाइल को टाइप करने की सुविधा ।
अपनाया गया सिंक्रनाइज़ेशन विधि निम्नानुसार कार्य करता है । प्रवेश आवेदन द्वारा उत्पादित फ़ाइल में प्रत्येक प्रविष्टि स्वरूप “yyyy-MM-ddThh में एक टाइमस्टैंप के साथ संवर्धित है: MM: ss. kkk”, जहां: y = वर्ष, एम = महीने, डी = दिन, h = घंटा, एम = मिनट, एस = दूसरा, कश्मीर = मिलीसेकंड । ुला-OP PC-आधारित सॉफ़्टवेयर (C++ और MATLAB प्रोग्रामिंग भाषाएं) प्रत्येक छवि प्राप्ति अनुक्रम के प्रारंभ और समाप्ति समय की गणना करता है और प्रत्येक छवि में. vtk स्वरूप में यह जानकारी संग्रहीत करता है । प्रयोगों के दौरान एक सामान्य लौकिक संदर्भ प्रदान करने के लिए, उपरोक्त सॉफ़्टवेयर कार्यविधियां आरेख 3में फ़्रंट-एंड कंप्यूटर पर निष्पादित की जाती हैं । इस तरह से उत्पादित टाइमस्टैम्प फिर अंतिम डेटासेट का उत्पादन करने वाली पोस्ट-प्रोसेसिंग सॉफ्टवेयर प्रक्रियाओं द्वारा उपयोग किए जाते हैं (प्रोटोकॉल, अनुभाग 8 देखें).
एक और विशिष्ट सॉफ्टवेयर घटक का एहसास था और कार्य केंद्र पर चलाने के लिए ऑपरेटर के लिए वास्तविक समय प्रतिक्रिया प्रदान करने के लिए, श्री छवियों के लिए वर्तमान अमेरिका जांच की स्थिति से संबंधित है और विशेष रूप से, पूर्वनिर्धारित बन गया के सेट करने के लिए । एक सर्वर साइड पायथन में सॉफ्टवेयर दिनचर्या गति ट्रैकर लॉग फ़ाइल प्रक्रियाओं, एक ज्यामितीय आकार में वर्तमान अमेरिका जांच की स्थिति का अनुवाद करता है, और एक Paraview सर्वर के लिए डेटा भेजता है । एक Paraview ग्राहक एक ही Paraview सर्वर से जोड़ता है और वास्तविक समय में ज्यामितीय आकार की स्थिति प्रदर्शित करता है, एक श्री छवि पर आरोपित और आगे ज्यामितीय आकार का वर्णन पूर्वनिर्धारित बन गया है । परिणामी रीयल-टाइम विज़ुअलाइज़ेशन का एक उदाहरण चित्र 17में दिखाया गया है ।
