Il mercato crescente per scanner piccolo e portatile ad ultrasuoni (US) sta portando allo sviluppo di nuove sonde ecografiche in quale parte del condizionamento del segnale e beamforming elettronica è integrata nell’impugnatura della sonda, soprattutto per l’imaging 3D/4D 1. tecnologie emergenti particolarmente adatti per raggiungere questo alto livello di integrazione includono trasduttori ad ultrasuoni di silicio microlavorato (MUTs)2, una classe di trasduttori Micro Electro-Mechanical System (MEMS) fabbricato su silicio. In particolare, capacitivo MUTs (CMUTs) hanno finalmente raggiunto una maturità tecnologica che li rende una valida alternativa ai trasduttori piezoelettrici per la prossima generazione di ultrasuono imaging systems3. CMUTs sono molto attraente a causa della loro compatibilità con tecnologie microelettroniche, ampia larghezza di banda – che produce una maggiore risoluzione di immagine – alta efficienza termica e, sopra tutti, alta sensibilità4. Nel contesto del progetto ENIAC JU DeNeCoR (dispositivi per NEUROCONTROLLO e Neuroriabilitazione)5, CMUT sonde vengono sviluppati6 per US di brain imaging applicazioni (ad es. neurochirurgia), dove alta qualità immagini 2D/3D/4D e rappresentazione accurata delle strutture del cervello sono necessari.
Nel processo di sviluppo di nuove sonde US, la possibilità di eseguire prime valutazioni delle prestazioni di imaging è fondamentale. Tecniche di valutazione tipici coinvolgono misura parametri specifici come risoluzione e contrasto, basato su immagini di fantasmi che imita il tessuto con target embedded della geometria noto ed ecogenicità. Analisi più realistica con formazione immagine target specifici dell’applicazione possono essere estremamente utile per una valutazione precoce delle prestazioni prevista delle sonde US nel loro potenziale applicazione a un campo clinico specifico. D’altra parte, la ripetibilità completa delle acquisizioni è fondamentale per le prove comparative di configurazioni diverse nel corso del tempo, e questo requisito esclude gli esperimenti in vivo del tutto.
Diversi lavori in letteratura sulle tecniche di imaging diagnostiche proposto l’uso di ex vivo esemplari animali7, cadavere cervelli8o tessuto che imita fantasmi9 per scopi diversi10, che includono la test di imaging, metodi, algoritmi di registrazione, le sequenze di risonanza magnetica (RM) o il modello del fascio US e conseguente qualità dell’immagine. Ad esempio, nel contesto di formazione immagine del cervello, Lazebnik et al. 7 utilizzato un cervello di pecora formalina per valutare un nuovo metodo di registrazione signor 3D; allo stesso modo, Choe et al. 11 studiato una procedura per la registrazione del sig e immagini di microscopia chiara di un cervello di scimmia gufo fisso. Un cervello di alcol polivinilico (PVA) fantasma è stato sviluppato in9 e utilizzato per eseguire acquisizioni di immagini multimodali (cioè signor, US e tomografia computerizzata) per generare un dataset di immagine condivisa12 per la prova della registrazione e algoritmi di imaging.
Nel complesso, questi studi confermano che l’uso di un obiettivo realistico per acquisizioni di immagine è davvero un passo essenziale durante lo sviluppo di una nuova tecnica di imaging. Questo rappresenta una fase ancora più critica quando si progetta un nuovo dispositivo di imaging, come la sonda CMUT ci ha presentato in questa carta, che è ancora in una fase di prototipazione e ha bisogno di vasto e riproducibili nel tempo, per un’accordatura precisa di tutti i design parametri prima della sua realizzazione finale e possibile convalida in applicazioni in vivo (come in13,14,15).
Il protocollo sperimentale descritto in questo lavoro è stato così progettato per fornire una procedura di valutazione robusta, specifica per l’applicazione imaging per sonde US di recente sviluppato basati sulla tecnologia CMUT. Per garantire realismo e ripetibilità, bovino cervelli (ottenuti attraverso le catene commerciali di approvvigionamento alimentare standard) fissati in formalina furono scelti come target di imaging. La procedura di fissaggio garantisce la conservazione a lungo termine delle caratteristiche dei tessuti mantenendo soddisfacente qualità morfologica e le proprietà di visibilità sia in Stati Uniti e in risonanza magnetica16,17.
Il protocollo per la valutazione della qualità dell’immagine US qui descritta inoltre implementa una caratteristica preso in prestito da tecniche di neuronavigazione usati per neurochirurgia15. In tali approcci, US sonde sono collegate a un sistema che fornisce la posizione spaziale e orientamento dei dati in tempo reale di tracciamento del movimento. In questo modo, US immagini acquisite durante l’attività chirurgica possono essere automaticamente registrati e visualizzati, per l’orientamento, in sovrapposizione alle indispensabili signor immagini del cervello del paziente. Ai fini del presente protocollo, la sovrapposizione con immagini di MR (che sono considerati come il gold standard nella formazione immagine del cervello) è di grande valore, poiché permette esperti umani valutare visivamente che morfologico e caratteristiche del tessuto sono riconoscibili in le immagini di Stati Uniti e, vice versa, a riconoscere la presenza di artefatti dellimmagine.
La possibilità di confrontare le immagini acquisite con diverse sonde US diventa ancora più interessante. Il protocollo sperimentale ha presentato include la possibilità di definire una serie di pose di riferimento spaziale per acquisizioni US, incentrati sulle regioni più ricco volume identificate in una preliminare ispezione visiva delle immagini di MR. Uno strumento visivo integrato, sviluppato per il Paraview opensource software sistema18, fornisce indicazioni agli operatori per corrispondere tali predefiniti pone durante fasi di acquisizione immagine di US. Per le procedure di calibrazione richieste dal protocollo, è fondamentale dotare tutti gli esemplari di destinazione – biologici o sintetici – luoghi d’interesse di posizione predefinita che forniscono inequivocabili riferimenti spaziali. Tali punti di riferimento deve essere visibile nelle immagini di Stati Uniti e in MR e fisicamente accessibili per misurazioni effettuate con il sistema di tracciamento del movimento. Gli elementi di riferimento scelto per l’esperimento sono piccole sfere di vetro Flint, cui visibilità nelle immagini sia Stati Uniti che MR era dimostrato in letteratura19 e confermata da preliminare Uniti e signor scansioni eseguite prima degli esperimenti presentati.
Il protocollo presentato si basa sul ultrasuono Advanced Open Platform (ULA-OP)20, una ricerca completa e aperta e sistema di sviluppo per noi acquisizione immagine, che offre molte possibilità sperimentale più ampio rispetto commercialmente disponibile scanner e serve come base comune per la valutazione delle diverse sonde di US.
In primo luogo, gli strumenti utilizzati in questo lavoro sono descritti, con particolare riferimento alla sonda CMUT di nuova concezione. Il protocollo sperimentale è introdotte in dettaglio, con una descrizione completa di tutte le procedure coinvolte, dalla progettazione iniziale di calibrazione del sistema, di acquisizione di immagini e di post-elaborazione. Infine, le immagini ottenute sono presentate e i risultati sono discussi, insieme ai suggerimenti per sviluppi futuri di questo lavoro.
Strumentazione
Prototipo di sonda CMUT
Gli esperimenti sono stati effettuati usando un recente sviluppato 256-elemento CMUT array lineare prototipo, progettato, fabbricato e pranzo presso il laboratorio di Acoustoelectronics (ACULAB) dell’Università di Roma Tre (Roma, Italia), utilizzando il (CMUT invertire il processo di fabbricazione RFP)4. RFP è un microfabbricazione e tecnologia, specificamente concepita per la realizzazione di trasduttori MEMS per noi imaging Application, per cui la microstruttura CMUT è fabbricata seguente di silicio di imballaggio un “upside-down” approccio21. Rispetto ad altre tecnologie di fabbricazione CMUT, RFP produce per migliorate prestazioni di imaging dovuto l’alta uniformità della geometria delle cellule CMUT sopra l’intera matrice e per l’uso di materiali acusticamente progettati nel pacchetto testa sonda. Una caratteristica importante del RFP è che le pastiglie di interconnessione elettriche si trovano sulla parte posteriore dello stampo CMUT, che facilita l’integrazione 3D di matrici 2D e front-end multicanale elettronica.
La matrice CMUT 256-elemento è stata progettata per operare in una banda di frequenze centrata a 7,5 MHz. Un campo di elemento di 200 µm è stato scelto per la matrice risultante in una larghezza massima del campo di vista di 51,2 mm. L’altezza dei singoli elementi di matrice CMUT è stato definito per ottenere prestazioni adeguate in termini di risoluzione laterale e capacità di penetrazione. Un’altezza di elemento di matrice 5 mm è stato scelto al fine di ottenere una larghezza di fascio-3 dB di 0,1 mm e una profondità di-3 dB di fuoco di 1,8 mm a 7,5 MHz, quando lo stato attivo di elevazione di fissaggio ad una profondità di 18 mm per mezzo di una lente acustica. 195 elementi µm-wide array sono stati ottenuti organizzando e collegamento elettrico in parallelo 344 cellule di circolare CMUT, seguendo un layout esagonale. Di conseguenza, la risultante 5 µm-elemento-distanza, cioè il kerf, corrisponde la separazione di membrana-membrana. Una rappresentazione schematica della struttura di una matrice CMUT è riportata nella Figura 1.
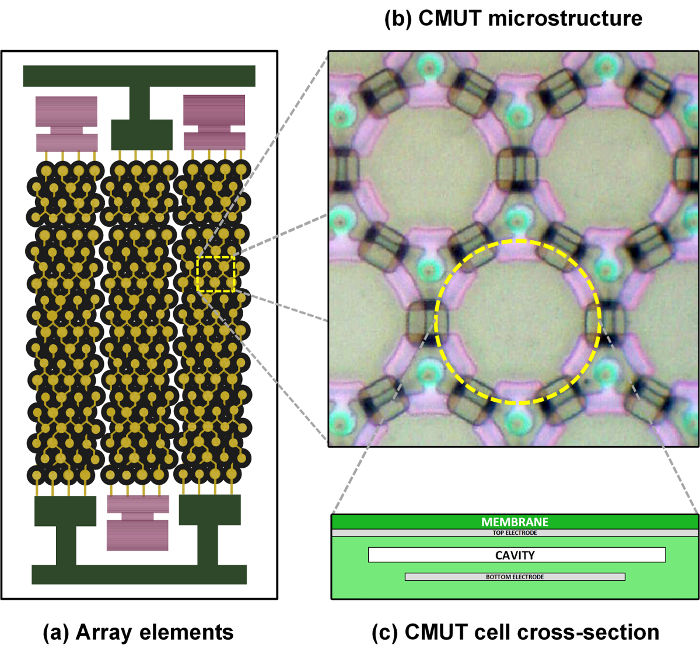
Figura 1: struttura di matrice CMUT. Rappresentazione schematica della struttura di una matrice CMUT: matrice di elementi composti da diverse celle collegate in parallelo (a), layout della microstruttura CMUT (b); sezione trasversale di una cella CMUT (c). Clicca qui per visualizzare una versione più grande di questa figura.
CMUT microfabbricazione parametri, cioè il laterale e verticale dimensioni del piatto e gli elettrodi, sono state definite mediante simulazioni di modellazione agli elementi finiti (FEM) con l’intento di realizzare un’operazione di immersione a banda larga, caratterizzata da un risposta in frequenza centrata a 7,5 MHz e una banda di 100%-6 dB bidirezionale frazionario. L’altezza della cavità, cioè il divario, è stata definita per raggiungere una tensione di crollo di 260 V per ottimizzare la sensibilità a due vie, di polarizzare i CMUT al 70% del crollo tensione4, considerando una tensione di segnale di eccitazione massima V 80. La tabella 1 riassume i principali parametri geometrici di microfabbricati CMUT.
| Parametri di progettazione matrice CMUT | |
| Parametro | Valore |
| Matrice | |
| Numero di elementi | 256 |
| Passo di elemento | 200 µm |
| Lunghezza elemento (elevazione) | 5 mm |
| Quota fissa messa a fuoco | 15 mm |
| CMUT microstruttura | |
| Diametro delle cellule | 50 µm |
| Diametro dell’elettrodo | 34 µm |
| Distanza laterale cellula–cellula | 7.5 µm |
| Spessore della piastra | 2,5 µm |
| Altezza del traferro | 0.25 µm |
Tabella 1. Parametri della sonda CMUT. Parametri geometrici della sonda lineare-matrice CMUT e microstruttura cellulare CMUT.
Il processo di imballaggio utilizzato per integrare la matrice CMUT in una testa di misura è descritta nel riferimento4. La lente acustica è stata fabbricata utilizzando una gomma di silicone di temperatura vulcanizzata (RTV) drogata con ossido di metallo nanopolveri per abbinare l’impedenza acustica di acqua ed evitare riflessioni spurie nel interfaccia22. Il composto risultante è stato caratterizzato da una densità di 1280 kg/m3 e una velocità del suono di 1100 m/s. Un raggio di curvatura di 7 mm è stato scelto per la lente cilindrica, portando a un fuoco geometrico di 18 mm e uno spessore massimo di circa 0,5 mm sopra la superficie del trasduttore. Una foto della testa della sonda CMUT è mostrata in Figura 2(a).
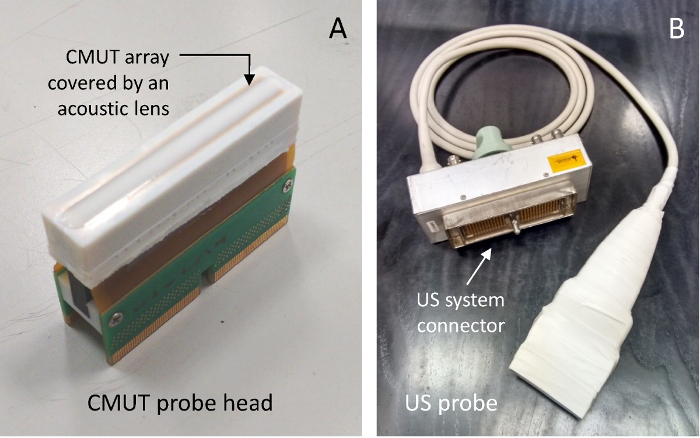
Figura 2: sonda CMUT. Testa della sonda CMUT sviluppata, tra cui l’array lineare di trasduttori e lente acustica (a) e la sonda CMUT completa con connettore (b). Clicca qui per visualizzare una versione più grande di questa figura.
La testa della sonda CMUT è stata accoppiata per l’impugnatura della sonda contenente l’elettronica di front-end analogico ricezione multicanale e un cavo multipolare per il collegamento allo scanner US. Il circuito elettronico di singolo canale è un amplificatore di tensione di 9 dB di guadagno impedenza di ingresso elevata che fornisce corrente elettrica necessaria per guidare l’impedenza del cavo. L’elettronica multicanale, designata nel riferimento 4, si basa su una topologia circuitale tra cui un ricevitore di basso rumore ultra-low-power e un interruttore integrato per la trasmissione/ricezione segnale stampa fronte/retro. L’alimentazione elettronica di front-end e la tensione di polarizzazione CMUT sono generati da un’unità di alimentazione personalizzato ed alimentati per la sonda attraverso il cavo multipolare. La sonda completa è illustrata nella Figura 2(b).
Piezoelettrico US sonde
Per confronto qualitativo delle immagini ottenute con la sonda CMUTsopra, due sonde di US piezoelettrici commercialmente disponibili sono stati inclusi negli esperimenti. Il primo è una sonda di allineamento lineare con 192 transducing elementi, un passo di 245 µm e una larghezza di banda frazionario di 110% centrato a 8 MHz. Questa sonda è stata usata per acquisire immagini B-modalità 2D. La seconda sonda è una sonda per l’imaging 3D con un array lineare meccanicamente sweep di 180 transducing elementi, con un passo di 245 µm e una larghezza di banda 100% frazionario centrato a 8,5 MHz. Un motore passo passo collocato all’interno della sonda alloggiamento consente di spazzare la matrice lineare per acquisire piani multipli, che possono essere utilizzati per ricostruire un’immagine 3D della scansione volume23.
Sistema di ULA-OP
L’acquisizione di immagini di Stati Uniti è stato effettuato impiegando l’ULA-OP sistema20, che è un sistema completo e aperto US ricerca e sviluppo, progettato e realizzato presso il laboratorio di progettazione microelettronica sistemi dell’Università di Firenze, Italia. Il sistema di ULA-OP può controllare, sia in trasmissione (TX) e ricezione (RX), fino a 64 canali indipendente collegato tramite uno switch a matrice ad una sonda di US con fino a 192 piezoelettrico o CMUT trasduttori. L’architettura caratteristiche due elaborazione principale schede di sistema, un bordo di analogico (AB) e una scheda digitale (DB), entrambi contenuti in un rack, che è completata da una scheda di alimentazione e una scheda di back-plane che contiene il connettore della sonda e tutti i routing interno componenti. L’AB contiene il front-end per i trasduttori di sonda, in particolare i componenti elettronici per condizionamento analogico di 64 canali e la matrice di commutazione programmabili che esegue il mapping in modo dinamico i canali TX-RX ai trasduttori. Il DB è responsabile di beamforming in tempo reale, sintetizzando i segnali TX e RX di elaborazione riecheggia per produrre l’output desiderato (per esempio B-modalità immagini o i sonograms Doppler). Vale la pena sottolineare che il sistema di ULA-OP è completamente configurabile, quindi il segnale in TX può essere qualsiasi forma d’onda arbitraria entro la larghezza di banda di sistema (per esempio impulsi di tre livelli, sine-scoppi, stridii, codici di Huffman, ecc.) con un massimo ampiezza di 180 Vpp; Inoltre, la strategia di beamforming può essere programmata secondo i modelli Ultima messa a fuoco (ad es. concentrati onda, multi-line-trasmissione, onda piana, divergenti onde, diffrazione limitata travi, ecc.)24,25 . A livello hardware, questi compiti sono condivisi tra cinque Field Programmable Gate Arrays (FPGA) e un Digital Signal Processor (DSP). Con sonde, come quello descritto in precedenza, di imaging 3D meccanicamente spazzato il sistema ULA-OP controlla anche il motore passo a passo all’interno della sonda, per l’acquisizione sincronizzata di singoli fotogrammi 2D in ogni posizione della matrice trasduttore.
Il sistema di ULA-OP può essere ri-configurato in fase di esecuzione e adattato a diverse sonde di US. Comunica attraverso un canale di USB 2.0 con un computer host, dotato di uno strumento di software specifici. Quest’ultimo ha un’interfaccia grafica configurabile che fornisce una visualizzazione in tempo reale di immagini US, ricostruito in vari modi; con sonde volumetriche, ad esempio, due B-modalità immagini di piani perpendicolari nel volume digitalizzato possono essere visualizzate in tempo reale.
Il vantaggio principale del sistema ULA-OP ai fini del protocollo descritto è che permette una facile messa a punto dei parametri TX-RX e offre l’accesso completo ai dati raccolti in ogni fase della elaborazione catena26, rendendo anche possibile segnale per testare nuove modalità di imaging e beamforming tecniche27,28,29,30,31,32,33.
Sistema di tracciamento del movimento
A record negli Stati Uniti sonda posizione durante l’acquisizione di immagini, un movimento ottico sistema di tracciamento è stato autonomo34. Il sistema è basato su un sensore che emette luce infrarossa tramite due illuminatori (light emitting diode (LED)) e utilizza due ricevitori (cioè una lente e un charge coupled device (CCD)) per rilevare la luce riflettuta dal più specifico scopo passivo marcatori disposti in forme rigide predefinite. Informazioni sulla luce riflessa viene quindi elaborati da una CPU a bordo per calcolare dati sia posizione e l’orientamento, che possono essere trasferiti a un computer host collegato via USB 2.0. Lo stesso link può essere utilizzato per controllare la configurazione dell’unità sensore.
L’unità sensore di navi con un set di strumenti, ciascuno dotato di quattro marcatori riflettenti disposti in una configurazione geometrica rigida. Il sistema di tracciamento del movimento è in grado di monitorare simultaneamente, fino a sei distinti strumenti rigidi ad una frequenza di lavoro di circa 20 Hz. Due tali strumenti sono stati utilizzati per questi esperimenti: uno strumento puntatore, che permette di acquisire la posizione 3D toccati dalla sua punta, e uno strumento dotato di morsetto, che può essere collegato alla sonda US sotto test (Vedi Figura 14).
Sul lato software, il Tracciatore movimento dispone di una basso livello seriale application programming interface (API) per entrambi unità controllo e acquisizione dati, che possa essere richiamate tramite USB. Per impostazione predefinita, posizione e orientamento vengono restituiti come elementi di Multi-entry, vale a dire una voce per ogni strumento da rilevare. Ogni voce contiene una posizione 3D (x, y, z) espresso in mm e un orientamento (q0, q,x, qy, qz) espresso come un quaternione. Il sistema è anche dotato di una casella degli strumenti di livello superiore strumenti software, che include uno strumento di gestione grafico per la visualizzazione e le posizioni/orientamenti di più strumenti all’interno del campo visivo dell’unità sensore di misura in tempo reale.
Componenti software, integrazione e panoramica del sistema
Il diagramma in Figura 3 riassume la strumentazione adottata per il protocollo, descrivendo anche il flusso di dati che scorre attraverso i sistemi.
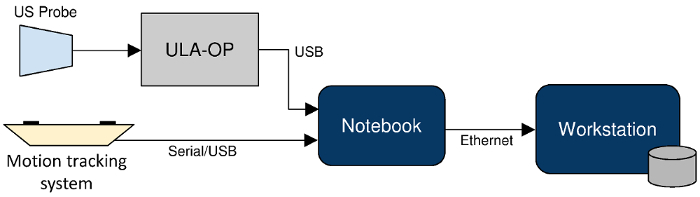
Figura 3: schema a blocchi dell’integrazione dell’intero hardware installazione e sistema di. La sonda statunitense è collegata al sistema ULA-OP che comunica via USB con il notebook per acquisizione di immagini di US. Allo stesso tempo, il notebook è collegato via USB per il sistema, per l’acquisizione di dati di posizione, di tracciamento del movimento e via Ethernet alla workstation, per l’elaborazione dati. Clicca qui per visualizzare una versione più grande di questa figura.
A parte le sonde US, la tracciatura del movimento e il sistema di ULA-OP, che sono state descritte sopra, il programma di installazione include anche due computer, vale a dire un taccuino e una workstation. Il primo è il principale front-end per strumentazione, ricevere e sincronizzare i due flussi di dati in entrata principale: US immagini provenienti dal sistema di ULA-OP e il 3D dati dal tracker movimento di posizionamento. Fornisce inoltre un feedback visivo all’operatore per le immagini acquisite. La workstation ha sostanzialmente più alta capacità di archiviazione e potenza computazionale. Fornisce supporto di back-end per post-elaborazione delle immagini e un repository per i set di dati imaging combinato. La workstation è utilizzata ancheper la visualizzazione di immagini di Stati Uniti e onorevole, compresa la possibilità di visualizzazione 3D simultanea di immagini multi-modale registrati.
Un requisito fondamentale per gli esperimenti di acquisizione immagine è la sincronizzazione di due flussi di dati principale. Il tracciamento del movimento e sistemi di ULA-OP sono strumenti indipendenti che non supportano ancora una sincronizzazione esplicita delle attività. Per questo motivo, è necessario essere opportunamente combinati per rilevare la corretta posizione 3D della sonda US al momento ogni fetta di immagine è stata acquisita US immagine dati e posizione informazioni. Per questo scopo, un’applicazione di registrazione specifico è stata sviluppata per la registrazione e timestamping in tempo reale i dati forniti dal tracciamento sistema, modificando un componente software C++ è incluso, in questo caso, nel tracciatore movimento stesso del movimento. In genere, sistemi di rilevamento di movimento dispongono di un insieme di API che permette l’acquisizione dei dati in tempo reale e li trascrivere in un file.
Il metodo adottato sincronizzazione funziona come segue. Ogni voce nel file prodotto dalla domanda di registrazione è aumentata con un timestamp nel formato “AAAA-MM-ddThh:mm:ss.kkk”, dove: y = anno, M = mese, d = giorno, h = ore, m = minuti, s = secondo, k = millisecondi. Il software basato su PC di ULA-OP (linguaggi di programmazione C++ e MATLAB) calcola l’inizio e fine tempo di ogni sequenza di acquisizione immagine e memorizza queste informazioni in ogni immagine nel formato .vtk. Per fornire un riferimento temporale comune durante gli esperimenti, entrambe le procedure di cui sopra software vengono eseguite sul computer front-end nella Figura 3. I timestamp prodotti in questo modo vengono quindi utilizzati dalle procedure software post-elaborazione che producono il dataset finale (Vedi protocollo, sezione 8).
Un altro componente software specifico è stato realizzato ed eseguire sulla workstation per fornire un feedback in tempo reale all’operatore, mettendo in relazione la corrente US sonda posizione per MR immagini e, in particolare, la serie di pose predefinite. Una routine di software server-side in Python elabora il file di registro di motion tracking, traduce la corrente US sonda posizione in una forma geometrica e lo invia i dati a un server di Paraview. Un client Paraview si connette allo stesso server Paraview e nei display in tempo reale la posizione della forma geometrica, sovrapposta su un’immagine di MR e a ulteriori forme geometriche che descrivono le pose predefinite. Un esempio della visualizzazione in tempo reale risultante è mostrato in Figura 17.
