Økende markedet for liten og bærbar ultralyd (USA) skannere fører til utvikling av nye echographic sonder i hvilken del av signal-condition og beamforming elektronikk er integrert i sonde håndtaket, spesielt for 3D / 4D bildebehandling 1. Emerging technologies spesielt egnet for å oppnå dette høy grad av integrering inkluderer Micromachined Ultrasonic transdusere (MUTs)2, en klasse av mikro Elektromekanisk System (MEMS) transdusere laget på silisium. Spesielt har kapasitiv MUTs (CMUTs) endelig nådd en teknologisk modenhet som gjør dem et gyldig alternativ til Piezoelektriske transdusere for neste generasjon ultralyd imaging systems3. CMUTs er meget attraktivt på grunn av sin kompatibilitet med mikroelektronikk teknologi, stor båndbredde – som gir en høyere bildeoppløsning – høy termisk effektivitet og, fremfor alt, høy følsomhet4. I forbindelse med ENIAC JU prosjektet DeNeCoR (enheter for NeuroControl og NeuroRehabilitation)5, CMUT prober blir utviklet6 for amerikanske hjernen imaging programmer (f.eks nevrokirurgi), hvor høy kvalitet 2D/3D/4 D-bilder og nøyaktig gjengivelse av hjernen strukturer er nødvendig.
I utviklingsprosessen av nye amerikanske sonder er muligheten til å utføre tidlig vurderinger Imaging ytelse grunnleggende. Typisk vurderings-teknikker involvere måle bestemte parametere som oppløsning og kontrast, basert på bilder av vev-mimicking fantomer med innebygde mål kjent geometri og echogenicity. Mer realistisk analyse med programspesifikke tenkelig mål kan være ekstremt verdifullt for en tidlig vurdering av den forventede ytelsen for amerikanske sonder i potensielle programmet til et bestemt klinisk felt. På den annen side, den komplette repeatability av oppkjøp er grunnleggende for sammenlignende testing av ulike konfigurasjoner over tid, og dette kravet utelukker i vivo eksperimenter helt.
Flere arbeider i litteraturen om diagnostic imaging teknikker foreslått bruk av ex vivo dyr prøver7, cadaver hjerner8eller vev mimicking fantomer9 for ulike formål10, som omfatter den testing av imaging metoder, registrering algoritmer, magnetisk resonans (MR) sekvenser eller amerikanske bjelke-mønsteret og resulterer bildekvalitet. For eksempel i forbindelse med hjernen bildebehandling, Lazebnik et al. 7 brukes formalin-fast sauer hjerne til å evaluere en ny 3D MR registrering metode; tilsvarende Choe et al. 11 undersøkt en prosedyre for registrering av MR og * lys bilder av en fast ugle monkey hjernen. Polyvinylalkohol (PVA) hjerne phantom ble utviklet i9 og brukes til å utføre flere bilde oppkjøp (i.e. MR, USA, og beregnet tomografi) for å generere en delt bilde dataset12 for testing av registrering og tenkelig algoritmer.
Samlet bekrefter disse studier at bruk av et realistisk mål for bilde oppkjøp er virkelig et viktig skritt i utviklingen av en ny tenkelig teknikk. Dette representerer en enda mer kritisk fase når du utformer en ny bildegjengivelsesenhet, som CMUT oss sonde i dette papiret, som er i en prototyping fase og trenger omfattende og reproduserbar testing over tid, for en nøyaktig tuning av alle design parametere før den endelige realisering og mulig validering i i vivo programmer (som13,14,15).
Eksperimentell protokollen beskrevet i dette arbeidet er dermed utviklet for å gi en robust, program-spesifikke tenkelig vurdering prosedyre for nyutviklet amerikanske sonder basert på CMUT-teknologi. For å sikre både realisme og repeterbarhet, storfe valgt hjernen (fra standard mat-kommersielle forsyningskjeden) fast i formalin imaging mål. Fiksering fremgangsmåten garanterer langtidsoppbevaring av vevet egenskaper samtidig beholde tilfredsstillende morfologiske egenskaper og synlighet egenskaper i både USA og MR imaging16,17.
Protokollen for vurdering av amerikanske bildekvalitet beskrevet her også implementerer en funksjon lånt fra neuronavigation teknikker for nevrokirurgi15. I slike tilnærminger koblet amerikanske sonder til en bevegelse sporingssystem som gir romlige posisjon og retning data i sanntid. På denne måten kan amerikanske bilder ervervet under kirurgisk aktiviteter automatisk registrert og visualisert, for veiledning, i superposisjon pre-operatory MR-bilder av pasientens hjernen. I forbindelse med presentert protokollen, superposisjon med MR bilder (som anses som gullstandarden i hjernen imaging) er av stor verdi, siden det gir menneskelige eksperter å vurdere visuelt som morfologiske og vev funksjoner er gjenkjennelig i den amerikanske bilder, og vice versa, gjenkjenner forekomsten Imaging gjenstander.
Muligheten til å sammenligne bilder kjøpt med forskjellige amerikanske sonder blir enda mer interessant. Eksperimentell protokollen presentert inkluderer muligheten til å definere et sett med romlig referanse oppstiller for amerikanske oppkjøp, fokusert på de mest funksjonsrike volum regionene i en foreløpig visuell inspeksjon av MR bilder. En integrert visuelle verktøyet, utviklet for Paraview åpen kildekode programvare system18, gir veiledning til operatører for samsvarende slik forhåndsdefinerte positurer amerikanske bilde oppkjøpet faser. Den kalibrering prosedyrer krever protokollen, er det grunnleggende å utstyre alle mål prøvene – enten biologisk eller syntetiske – med forhåndsdefinerte posisjon landemerker som entydig romlige refererer. Slike landemerker må være synlig i både USA og MR bilder og fysisk tilgjengelig mål gjøres med motion sporingssystem. De valgte landemerke elementene for eksperimentet er små kuler av Flint glass, som synlighet i både USA og MR bilder ble demonstrert i litteratur19 og bekreftet av foreløpig USA og MR skanninger utført før presentert eksperimenter.
Protokollen presentert stoler på ultralyd avanserte åpne plattformen (ULA-OP)20, et komplett og åpent forskning og utviklingssystemet for oss bilde oppkjøpet, som gir mye større eksperimentelle muligheter enn kommersielt tilgjengelig skannere og fungerer som et felles grunnlag for vurdering av ulike amerikanske sonder.
Først er instrumentene som er brukt i dette arbeidet beskrevet, med spesiell henvisning til nydesignede CMUT sonden. Eksperimentell protokollen er intropå bakgrunn av et i detalj, med en grundig beskrivelse av alle prosedyrene som er involvert, fra innledende utforming til systemet kalibrering, til bildeopptak og etterbehandling. Endelig fått bildene blir presentert og resultatene er omtalt, sammen med hint fremtidig utvikling av dette arbeidet.
Instrumentering
CMUT sonde prototype
Forsøkene ble utført med en nyutviklet 256-element CMUT lineær array prototype, utviklet fabrikkert og pakket på Acoustoelectronics Laboratory (ACULAB) av Roma Tre universitet (Roma), bruker CMUT omvendt fabrikasjon prosessen ( RFP)4. Emballasje teknologi, spesielt utviklet for realisering av MEMS transdusere for oss bildebehandlingsprogrammer, der CMUT mikrostruktur er fabrikkert på silisium etter en “opp-ned” nærme21RFP er en microfabrication. Sammenlignet med andre CMUT fabrikasjon teknologier gir RFP tenkelig Resultatforbedringen skyldes høy sıtt CMUT cellene geometri over det hel oppstille og bruk av akustisk utviklet materialer i sonde hodet pakken. En viktig funksjon i RFP er at elektrisk samtrafikk putene er plassert på den bakre delen av CMUT dør, som letter 3D-integrering av 2D matriser og front-end flerkanals elektronikk.
Matrise med CMUT på 256-element ble designet til å operere i en frekvensbånd sentrert på 7,5 MHz. En element pitch på 200 µm ble valgt for array som resulterer i en felt-of-view maksimumsbredden 51,2 mm. Høyden på enkelt CMUT matriseelementene ble definert for å oppnå egnet ytelse lateral oppløsning og gjennomtrenging evne. En 5 mm matrise element høyde ble valgt for å oppnå en-3 dB stråle bredde på 0,1 mm og en-3 dB dybde av fokus på 1,8 mm på 7,5 MHz, når bestemmer høyden fokus i en dybde på 18 mm med en akustisk linse. 195 µm hele matriseelementer ble oppnådd ved å ordne og elektrisk tilkobling i parallell 344 sirkulære CMUT celler, etter et Sekskantet oppsett. Derfor 5 µm element til element distansen, i.e. kerf, samsvarer med membran-til-membran separasjon. En skjematisk fremstilling av en CMUT-matrise rapporteres i figur 1.
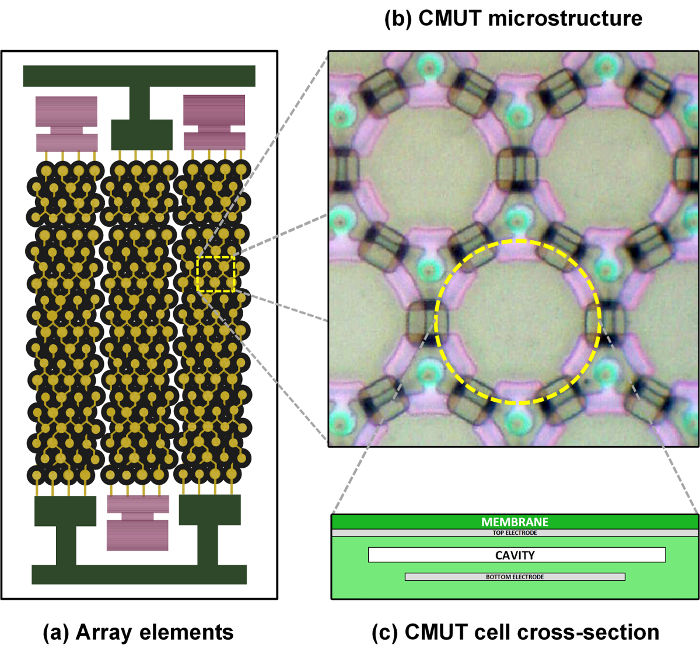
Figur 1: CMUT matrise struktur. Skjematisk fremstilling av strukturen til et CMUT utvalg: array elementer består av flere celler koblet i parallell (a), utformingen av den CMUT mikrostruktur (b); tverrsnitt av en CMUT celle (c). Klikk her for å se en større versjon av dette tallet.
Den CMUT microfabrication parametere, dvs sideveis og loddrett dimensjoner av platen og elektroder, ble definert med begrenset Element modellering (FEM) simuleringer med sikte på å oppnå en bredbånd nedsenking operasjon, preget av en frekvensrespons sentrert på 7,5 MHz og en 100%-6 dB toveis brøk båndbredde. Høyden på hulrom, dvs gapet, ble definert for å oppnå en kollaps spenning på 260 V å maksimere toveis sensitivitet, ved biasing CMUT på 70% av kollaps spenning4, vurderer en 80 V maksimal eksitasjon signal spenning. Tabell 1 oppsummerer de viktigste geometriske parametrene til microfabricated CMUT.
| CMUT matrise Design parametere | |
| Parameteren | Verdi |
| Matrise | |
| Antall elementer | 256 |
| Elementet pitch | jektet 200 µm bakover |
| Elementet lengde (høyde) | 5 mm |
| Fast høyde fokus | 15 mm |
| CMUT mikrostruktur | |
| Cellen diameter | 50 µm |
| Elektroden diameter | 34 µm |
| Celle til celle sideavstand | 7.5 µm |
| Plate tykkelse | 2,5 µm |
| Gapet høyde | 0,25 µm |
Tabell 1. CMUT sonde parametere. Geometriske parametrene CMUT lineær-array sonde og CMUT celle mikrostruktur.
Pakkeprosessen brukes til å integrere CMUT matrisen i en sonde hodet er beskrevet i referanse4. Akustisk linsen var fabrikasjon benytter en romtemperatur vulkanisert (RTV) silikongummi dopet med metal oxide nanopowders å matche akustisk impedans vann og unngå falske refleksjoner grensesnitt22. Den resulterende sammensatt var preget av en tetthet 1280 kg/m3 og en hastighet på 1100 m/s. En 7 mm kurvatur radius ble valgt for sylindriske linsen, fører til geometriske fokus på 18 mm og maksimum tykkelse på ca 0,5 mm over svingeren overflaten. Et bilde av CMUT sonde hodet er vist i figur 2(a).
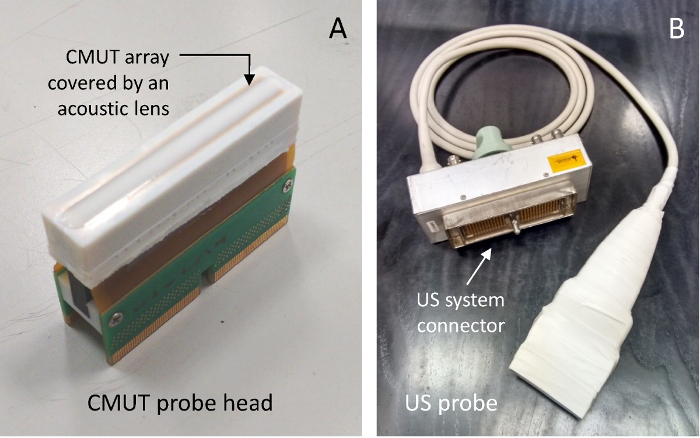
Figur 2: CMUT sonde. Leder for utviklet CMUT proben, herunder lineær rekke transduktorer og akustisk linse (a), og full CMUT sonde med kontakten (b). Klikk her for å se en større versjon av dette tallet.
CMUT sonde hodet var koblet til sonde håndtaket som inneholder flerkanals resepsjonen analog front-end elektronikk og en multipolar kabel for tilkobling til amerikanske skanneren. Enkeltkanals elektronisk krets er en høy input impedans 9 dB-gevinst spenning forsterker som gir elektrisk gjeldende nødvendig å kjøre kabel impedansen. Flerkanals elektronikk, beskrevet i referanse 4, er basert på en krets topologi inkludert en ultra-lav-effekt lav støy-mottaker og en integrert svitsj for tosidig utskrift overføre/motta signalet. Strømforsyningen front-end elektronikk og CMUT bias spenning er generert av en tilpasset strømforsyningsenheten og matet til sonden gjennom multipolar kabelen. Komplett sonden er vist i figur 2(b).
Piezoelektriske amerikanske sonder
For kvalitativ sammenligning av bilder innhentet med CMUT sondeovenfor, ble to kommersielt tilgjengelig piezoelectric amerikanske sonder inkludert i forsøkene. Den første er en lineær-array sonde med 192 transducing elementer, en 245 µm pitch og en 110% brøk båndbredde sentrert på 8 MHz. Denne sonde ble brukt til å erverve 2D B-bilder. Andre sonden er en sonde for 3D-bildebehandling med en mekanisk feiet lineær rekke 180 transducing elementer, med en 245 µm pitch og en 100% brøk båndbredde sentrert på 8,5 MHz. En stepper motor plassert inne sonden boliger kan feiende lineær array å erverve flere fly, som kan brukes til å rekonstruere et 3D-bilde av de skannede volum23.
ULA-OP systemet
Oppkjøpet av amerikanske bilder ble utført ved hjelp av ULA-OP systemet20, som er en komplett og åpent USA forskning og utvikling systemet, designet og realisert ved mikroelektronikk systemer Design Universitetet i Firenze, Italia. ULA-OP systemet kan styre, både i sending (TX) og resepsjonen (RX), til 64 uavhengige kanaler koblet gjennom en bryter matrise til en amerikansk sonde med opptil 192 piezoelectric eller CMUT transdusere. Systemet arkitektur har to viktigste behandlingen styrene, en Analog styret (AB) og en Digital styret (DB), begge i et rack, som utføres av en strømforsyning bord og en tilbake-plane board som inneholder sonde kontakten og alle intern ruting komponenter. AB inneholder frontprogram for sonden måleomformerne, spesielt elektroniske komponenter for analoge condition av 64 kanaler og programmerbare bryteren matrisen som tilordner dynamisk TX-RX kanalene til måleomformerne. DB er ansvarlig for sanntids beamforming, ekko syntetisere TX signaler og behandling RX for å produsere ønsket utdataformat (for eksempel B-bilder eller Doppler sonograms). Det er verdt å merke at ULA-OP systemet er fullt konfigurerbar, derav signalet i TX kan være en vilkårlig bølgeform innen systembåndbredde (f.eks tre nivåer pulser, sinus-pakker, chirps, Huffman koder, etc.) med maksimalt amplituden til 180 Vpp; i tillegg beamforming strategien kan programmeres etter de siste fokus mønstrene (f.eks fokusert bølge, multi-overføring, planet bølge, avvikende bølger, begrenset Diffraksjon bjelker, etc.)24,25 . På hardware nivå deles oppgavene mellom fem felt programmerbare Gate matriser (FPGAs) og en Digital signalprosessor (DSP). Med mekanisk feide 3D bildeprodukter sonder, som det som er beskrevet ovenfor, kontrollerer ULA-OP systemet stepper motor i proben, for synkroniserte oppkjøpet av 2D enkeltbilder på hver posisjon i svinger matrisen.
ULA-OP systemet kan re-konfigurert ved kjøretid og tilpasset ulike amerikanske sonder. Den kommuniserer gjennom en USB 2.0-kanal med en vertsdatamaskin, utstyrt med et bestemt verktøy. Sistnevnte har en konfigurerbar grafisk grensesnitt som gir sanntids visualisering av amerikanske bilder, i forskjellige moduser; med volumetriske sonder, for eksempel kan to B-modus bilder av vinkelrett fly i skannede volumet vises i sanntid.
Den største fordelen av ULA-OP systemet i forbindelse beskrevet protokollen er at den tillater en enkel tuning av parameterne TX-RX og tilbyr full tilgang til signal dataene samles inn på hvert trinn i behandlingen kjeden26, også gjør det mulig å teste nye tenkelig modaliteter og beamforming teknikker27,28,29,30,31,32,33.
Bevegelse sporingssystem
Post USA sonde posisjon under bildeopptak var en optisk bevegelse sporingssystem næringsdrivende34. Systemet er basert på en sensorenhet som avgir infrarødt lys via to illuminators (lys emitting diodene (lys)) og bruker to mottakere (dvs. en linse og en kostnad – sammen enhet (CCD)) for å oppdage lyset som reflekteres av flere mål-spesifikke passiv markører ordnet i forhåndsdefinerte stive figurer. Informasjon om reflektert lys behandles deretter av en innebygd CPU til å beregne både posisjon og retning data som kan overføres til en vertsmaskin koblet via USB 2.0. Den samme linken kan brukes til å kontrollere konfigurasjonen av sensoren.
Sensoren enheten leveres med et sett med verktøy, hver utstyrt med fire reflekterende markører ordnet i en rigid geometriske konfigurasjon. Bevegelse sporing system kan spore opptil seks forskjellige stive verktøy samtidig, med en fungerende frekvens på rundt 20 Hz. To slike verktøy ble brukt til disse eksperimentene: en peker-verktøyet, som lar anskaffe 3D posisjonen rørt av sine tips, og en klemme utstyrt verktøy, som kan knyttes til amerikanske sonden under test (se figur 14).
På programvaresiden har bevegelse sporing et lavt nivå føljetong programmeringsgrensesnitt (API) for både enheten kontroll og datafangst, som kan nås via USB. Standard returneres posisjon og orientering som multi-Entry varer, dvs en oppføring per hvert verktøy spores. Hver oppføring inneholder en 3D posisjon (x, y, z) uttrykt i mm og en orientering (q0, qx, qy, q-z) uttrykt som en quaternion. Systemet kommer også med en verktøykasse på høyere nivå programvareinstrumenter, som inkluderer grafisk sporingsverktøy for å visualisere og måle i sanntid stillinger/retningene av flere verktøy på synsfelt av sensoren.
Systemkomponenter oversikt, integrering og programvare
Diagrammet i Figur 3 oppsummerer instrumentering vedtatt for protokollen, beskrev også datastrømmen som flyter over systemene.
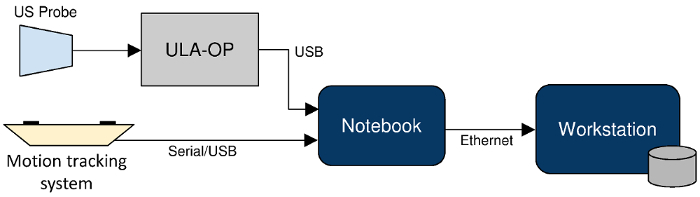
Figur 3: blokkdiagram over hele maskinvare oppsett og systemintegrasjon. Amerikanske proben er koblet til ULA-OP systemet som kommuniserer via USB med notatblokken for amerikanske bildeopptak. Samtidig, er notatblokken også koblet via USB til bevegelse sporing systemet, for posisjon datainnsamling, og via Ethernet til arbeidsstasjonen, for databehandling. Klikk her for å se en større versjon av dette tallet.
Bortsett fra amerikanske sonder, bevegelse sporing og ULA-OP systemet, som er beskrevet ovenfor, inneholder oppsettet også to datamaskiner, nemlig en bærbar PC og en arbeidsstasjon. Tidligere er viktigste frontdatabase til instrumentering, motta og synkronisere de to viktigste innkommende datastreamer: USA bildene kommer fra ULA-OP systemet og 3D plasseringsdata fra bevegelse sporing. Det gir også en visuell tilbakemelding til operatøren for bilder blir kjøpt. Arbeidsstasjonen har betydelig høyere beregningsorientert kraften og lagringsplassen kapasitet. Det støtter bakenforliggende etter bildebehandling og et oppbevaringssted for kombinert tenkelig datasett. Arbeidsstasjonen brukes ogsåfor visualisering av USA og MR bilder, inkludert muligheten av samtidige 3D-visualisering av registrerte multimodal bilder.
En kritisk behov for bilde oppkjøpet eksperimenter er synkroniseringen av de to viktigste datastrømmene. Den bevegelse sporing og ULA-OP systemer er uavhengige instrumenter som ennå ikke støtter en eksplisitt synkronisering av aktiviteter. På grunn av dette må USA bildet data og posisjon informasjon kan kombineres riktig for å gjenkjenne riktig 3D posisjon av amerikanske sonden når hvert bilde-stykke ble kjøpt. For dette formålet, er en bestemt logging-programmet utviklet for opptak og timestamping i sanntid data levert av bevegelse sporing system, ved å endre en C++ programvarekomponent som følger, i dette tilfellet i bevegelse sporing selv. Vanligvis, motion tracking systemer har en lavnivå API som kan registrere data i sanntid og renskriving til en fil.
Synkroniseringsmetoden vedtatt fungerer som følger. Hver oppføring i filen produsert av logging-programmet er forsterket med tidsstempel i formatet “yyyy-MM-ddThh:mm:ss.kkk”, der: y = år, M = måned, d = dag, h = time m = minutt, s = andre, k = millisekunder. ULA-OP PC-basert programvare (C++ og MATLAB programmering språk) beregner start- og sluttidspunkt for hver anskaffelse bildesekvens og lagrer dette i hvert bilde i .vtk format. For å gi felles timelige referanse under forsøkene, kjøres både programvare fremgangsmåtene ovenfor på front-end datamaskinen i Figur 3. Tidsstempler produsert på denne måten brukes deretter av etterbehandling programvare prosedyrene som produserer den endelige datasettet (se avsnitt 8-protokollen).
En annen bestemt programvarekomponent ble realisert og kjøre på arbeidsstasjonen å gi tilbakemelding til operatøren av knyttet det gjeldende amerikanske sonde posisjon til MR bilder og spesielt til settet med forhåndsdefinerte positurer. En server-side programvare rutine i Python prosesser bevegelse tracker loggfilen, oversetter det gjeldende amerikanske sonde posisjon i en geometrisk form, og sender dataene til en Paraview server. En Paraview klient kobler til samme Paraview serveren og i sanntid viser plasseringen av den geometriske formen, lagt på en MR og ytterligere geometriske figurer som beskriver de forhåndsdefinerte positurer. Et eksempel på den resulterende sanntids visualiseringen er vist i Figur 17.
