A percepção do toque é uma forma fundamental das sensações processadas pelo sistema somatosensorial, incluindo percepção háptica e percepção tátil. A percepção tátil passiva, em oposição à exploração ativa, significa que o objeto é movido para fazer contato com a pele estática1,2. Como em outros sentidos, a resolução espacial na percepção tátil, também denominada acuidade espacial tátil, é geralmente representada pelo limiar tátil, limiar de detecção ou limiar de discriminação2,3. Nos últimos 100 anos, o limiar de dois pontos tem sido comumente usado como medida de acuidade espacial tátil4. No entanto, muitos estudos indicaram que o limiar de dois pontos é um índice inválido da capacidade espacial tátil porque a discriminação de dois pontos (DP) não pode excluir pistas não espaciais (por exemplo, se dois pontos estão muito próximos, eles podem localizar um único campo receptivo aferente, que prontamente evoca aumento da atividade neural) e manter um critério estável para respostas3,4,5. Devido ao número de desvantagens do TPD, vários métodos novos e promissores foram desenvolvidos como substituições, como orientação de grade tátil (GO)3,6, discriminação de orientação de dois pontos5, reconhecimento de letras levantadas, detecção delacunas 7,padrões de ponto, anéis Landolt C8e discriminação de ângulo (AD)9,10. Atualmente, devido às vantagens na operação de GO, bem como à estrutura espacial e complexidade do estímulo utilizado, a GO é cada vez mais utilizada para medir a acuidade espacial tátil11,12,13.
Embora o GO tátil se baseie em mecanismos espaciais subjacentes, produzindo assim uma medida confiável de acuidade espacial tátil, ainda é debatido se o desempenho do GO é parcialmente afetado por pistas não espaciais14 (por exemplo, sinais intensivos que podem fornecer uma sugestão para identificar a diferença entre estímulos de orientação). Além disso, go consiste apenas em tarefas simples de orientação espacial (ou seja, horizontal e vertical) e envolve principalmente o processamento sensorial, que limita seu uso ao explorar a interação hierárquica entre o processamento primário tátil no córtex primário somatosensorial e a posse avançada tátil envolvendo o córtex parietal posterior (PPC) e o giro supramarginal (SMG)15,16,17. Para compensar essas desvantagens, foi desenvolvido um AD tátil para medir a acuidade espacial tátil9,10. Em D.A, um par de ângulos desliza passivamente pela ponta dos dedos. Os ângulos variam de tamanho, e o sujeito precisa determinar qual dos ângulos é maior. Para realizar consistentemente essa tarefa, as características espaciais dos ângulos táteis devem ser representadas e armazenadas na memória de trabalho e, em seguida, comparadas e discernidas. Portanto, o AD tátil envolve não apenas o processamento primário, mas também a cognição avançada da percepção tátil, como memória de trabalho e atenção.
Como em uma variedade de testes de percepção de orientação de linha, no AD tátil o sujeito é apresentado sucessivamente com um ângulo de referência e um ângulo de comparação e é solicitado a indicar qual é o ângulo maior18,19,20,21. As linhas que compõem os ângulos são iguais em comprimento e simetricamente distribuídas ao longo de um bisetor imaginário. Alterando simetricamente as dimensões espaciais das linhas, todos os tipos de ângulos de plano elevados podem ser criados. Portanto, uma vantagem crítica desse método é que os ângulos diferenciados possuem estruturas espaciais semelhantes. Além disso, a representação espacial adquirida no AD é mais sequencial do que a obtida em GO. No entanto, o limiar de D.C. fornece evidências de que a acuidade espacial tátil é suficiente para permitir a discriminação espacial entre os objetos22. Além disso, a percepção espacial tátil do ângulo pode ser experimentada de ponto a ponto e finalmente formar um ângulo de plano bidimensional no qual pistas não espaciais podem desempenhar apenas um pequeno papel.
O limiar de D.A. foi encontrado para aumentar com o aumento da idade, o que pode resultar da necessidade de alta carga cognitiva na tarefa tátil de AD. Assim, pode fornecer um mecanismo de monitoramento no diagnóstico de comprometimento cognitivo9,10. Embora o desempenho da AD seja afetado pelo declínio relacionado à idade, ele pode ser significativamente melhorado em jovens por treinamento contínuo ou treinamento de tarefas táteissemelhantes 23. Além disso, estudos de ressonância magnética mostraram que uma tarefa de ângulo tátil de correspondência para amostra ativada em determinadas regiões corticais responsáveis pela memória de trabalho, como o córtex parietal posterior17,24. Esses achados sugerem que a discriminação de ângulo tátil é uma medida promissora para a acuidade espacial tátil envolvendo cognição avançada. Aqui, o equipamento tátil de AD e seu uso são descritos em detalhes. Outros pesquisadores táteis podem reproduzir o equipamento de AD e usá-lo em suas pesquisas.
O equipamento tátil de AD, ou estimulador de ângulo passivo-dedo tátil (TSPAS), usa um slide eletrônico para transmitir um par de estímulos angulares para deslizar passivamente pela pele(Figura 1). Os braços dos sujeitos estão confortavelmente, prostrados em uma mesa. A mão direita senta-se em uma placa de mão na mesa, e um bloco de dedos indicador está situado ligeiramente abaixo da abertura da placa. O software do computador pode controlar o slide, movê-lo a uma velocidade fixa e movê-lo para frente e para trás. À medida que o slide avança, os estímulos angulares deslizam passivamente pela pele a uma velocidade fixa começando na ponta dos dedos. Quando o slide se move para trás para sua posição inicial e muda para outro par de estímulos de ângulo, o sujeito precisa levantar o dedo indicador para cima e esperar por uma ordem para colocá-lo levemente novamente na abertura. Assim, o equipamento apresenta estímulos de ângulo tátil a uma velocidade controlada, duração de contato estável e intervalo interestimuloso constante. O sujeito relata oralmente um número de sequência, e o experimentador registra-o como uma resposta e passa a realizar o próximo teste.
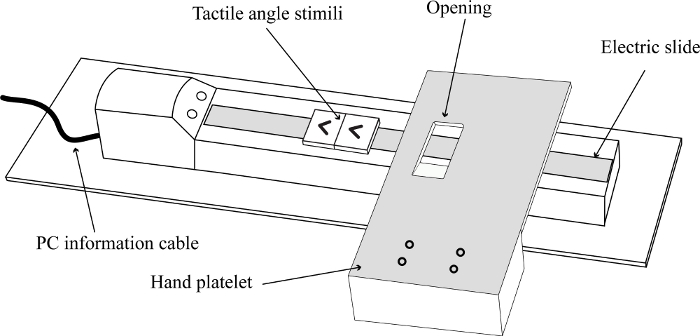
Figura 1: Visão geral do TSPAS.
O equipamento consiste em quatro partes: 1) estímulos de ângulo tátil (ou seja, o ângulo de referência e dez ângulos de comparação); 2) a placa de mão que fixa a mão do sujeito no lugar e mantém apenas o dedo indicador em contato com os estímulos; 3) o controle deslizante eletrônico que carrega os estímulos táteis; e 4) o sistema de controle do computador pessoal (PC) que controla a velocidade e a distância de movimento do slide eletrônico. Clique aqui para ver uma versão maior desta figura.
