Kunstig sensorisk feedback (ASF) kan defineres som den praksis at give real-time biologiske oplysninger til enkeltpersoner, ofte kompensere for kompromitteret proprioception eller anden sensorisk mekanisme. ASF har været længe brugt i realm af rehabilitering af tilskadekomne eller handicappede for at hjælpe med at inddrive aspekter af fysisk funktion og bevægelse 1 – 3 ud, giver mennesker mulighed for at styre fysiske processer, der engang var en ufrivillig reaktion af det autonome nervesystem 4. En underkategori af ASF, biomekanisk biofeedback, bruger eksterne sensorer til at måle parametre i relation til balance eller gangart kinematik, og videregive disse oplysninger til den enkelte gennem en slags anvendt stimulus. En stadig mere populær tilgang til biomekanisk tilbagemeldinger beskæftiger små vibrerende motorer, eller kontaktorer, placeret på forskellige dele af kroppen til at give rumlig såvel som tidsmæssig feedback. Forrige litteratur har vist promising resultater understøtter brugen af vibrotactile tilbagemeldinger i ansøgninger til personer med lavere lemmer amputationer, vestibulære svækkelser, og aldring-relaterede tab af balance 5 – 9.
En grundig forståelse af de mekanismer, der styrer en persons opfattelse og reaktion på specifikke stimuli er nødvendig for at informere en effektiv gennemførelse af ASF-systemer til forskellige applikationer. For vibrotactile tilbagemeldinger, chef blandt disse mekanismer er proprioception og sensomotoriske respons, specielt brugeren følsomhed over for de anvendte vibrationer og den nødvendige tid til at udføre den ønskede reaktion. Enhver sensorisk information formidles gennem vibrationer stimuli skal være kodet som specifikke kombinationer af vibrationer frekvens, amplitude, placering og rækkefølge. Derfor bør udformningen af vibrotactile ASF-systemer vælge kombinationer af parametre for at maksimere brugerens opfattelse og fortolkning af stimuli, somsamt aktualitet og nøjagtighed af den resulterende motorisk reaktion. Målet med denne protokol er at skabe en platform, hvorfra man kan evaluere svartider og respons nøjagtighed til forskellige vibrations stimuli til at informere design af ASF-systemer til brug med forskellige sensoriske-forringet befolkninger.
Metoderne beskrives her bygger på tidligere forskning udforske menneskets opfattelse af taktile og vibrotactile tilbagemeldinger 3,5,6, og blev udviklet til brug i to tidligere undersøgelser 10,11. De to sidstnævnte undersøgelser ansat denne protokol til at undersøge virkningerne af vibrationer frekvens og placering på nøjagtighed og aktualitet af brugernes reaktioner i lavere lemmer amputerede, der viser, at begge parametre væsentligt påvirker resultatmål, og at en høj grad af respons nøjagtighed kan være opnået. Disse resultater kan bruges til at informere den ideelle placering af kontaktorer i fremtidige studier og kliniske anvendelser af vibrotactile ASF-systemer. Andre seneste arbejde medCrea et al. 12 undersøgte bruger følsomhed overfor ændringer i vibrationsmønstre anvendes på låret ved gang anvendelse af mundtlige responser til tilkendegiver opfattede ændringer i vibrationer mønstre, snarere end en motorisk reaktion. Mens disse verbale reaktioner kan anvendes til at måle afsløring nøjagtighed, de ikke udgør fejl og forsinkelser, som kan være til stede i motorstyringen processen.
Den primære setup for de følgende eksperimenter består af en række vibrerende motorer tilsluttet pulsbredde-moduleret output stifter af en microcontroller board. Brættet er på sin side styres med en Universal Serial Bus (USB) forbindelse til en computer, der kører kommercielt tilgængeligt system design software. Motorerne kræve en yderligere forstærkerkredsløb for at sikre tilstrækkelig spænding og strøm tilføres over et bredt område af vibrationsfrekvenser. Et eksempel forstærker kredsløb er vist i figur 1. Den Bipolar Transistor (BJR) I figuren kan erstattes med mindre metal-oxid-halvleder felt-effekt transistor (MOSFET) for mere effektiv drift og mindre størrelse. Ligeledes kan hele forstærkerkredsløb erstattes af en off-the-shelf haptisk motor driver at give yderligere kontrol og reduceret størrelse. Hver motor kræver sin egen kredsløb, og ved hjælp af maskinerne i dette papir, op til ti motorer kan styres af en enkelt microcontroller board.
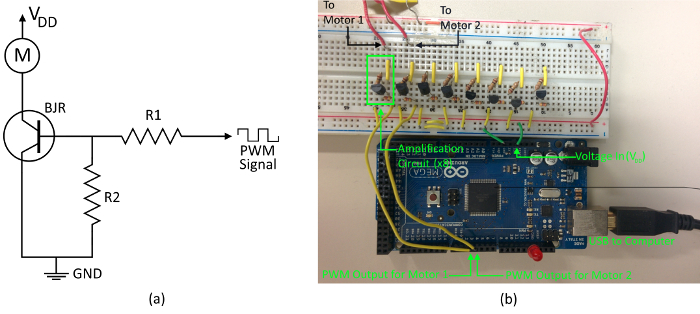
Figur 1. Motor Wiring. (A) forstærkningskredsløb for en enkelt vibrationer motor er vist. Hver motor kræver et separat kredsløb og skal tilsluttes til en unik PWM output port på microcontroller. V DD her repræsenterer 3,3 V strøm af mikrocontrolleren bord, og modstanden R2 tjener som en pull-down resister at sikre transistorkontakten forbliver åben, når nul spænding er ca.løj. (B) Et eksempel på den fysiske forbindelse af to motorer. Selvom otte individuelle amplifikationsprodukter kredsløb er vist, kun to er forbundet med vibrationsmotorer. I denne protokol R1 = 4,7 kohm og R2 = 100 kohm. Klik her for at se en større version af dette tal.
