feedback sensoriale artificiale (ASF) può essere definita come la pratica di fornire in tempo reale informazioni biologiche di individui, spesso compensare proprioception compromesso o altro meccanismo sensoriale. ASF è stato a lungo utilizzato nel campo della riabilitazione di feriti o disabili, per aiutare nel recupero di aspetti della funzione fisica e di movimento 1-3, consentendo ai singoli di controllare i processi fisici che un tempo erano una risposta involontaria del sistema nervoso autonomo 4. Una sottocategoria di ASF, biofeedback biomeccanico, utilizza sensori esterni per misurare i parametri relativi al pareggio o andatura cinematica, e comunica tali informazioni alla persona attraverso una sorta di stimolo applicato. Un approccio sempre più popolare al feedback biomeccanico impiega motori piccoli vibranti o contattori, collocati a diverse parti del corpo per fornire spaziale e temporale risposte. la letteratura precedente ha mostrato promising risultati supportano l'uso del feedback vibro-tattile nelle applicazioni per le persone con amputazioni degli arti inferiori, disturbi vestibolari, e l'invecchiamento relative perdita di equilibrio 5-9.
Una conoscenza approfondita dei meccanismi che controllano la percezione e la risposta di un individuo a stimoli specifici è necessaria per informare l'effettiva attuazione di sistemi ASF per diverse applicazioni. Per feedback vibrotattile, primo fra questi meccanismi sono propriocettiva e la risposta motoria, in particolare la sensibilità utente alle vibrazioni applicate e il tempo necessario per eseguire la reazione desiderata. Tutte le informazioni sensoriali comunicati attraverso stimoli di vibrazione deve essere codificato come specifiche combinazioni di frequenza di vibrazione, l'ampiezza, la posizione e la sequenza. Pertanto, progettazione di sistemi ASF vibrotattili dovrebbe selezionare combinazioni di parametri per ottimizzare la percezione dell'utente e l'interpretazione degli stimoli, comenonché la tempestività e l'accuratezza della risposta motoria risultante. L'obiettivo di questo protocollo è quello di fornire una piattaforma da cui partire per valutare i tempi di risposta e precisione di risposta a vari stimoli vibrazionali per informare la progettazione di sistemi ASF per l'uso con diverse popolazioni sensoriali ridotta.
I metodi descritti qui si basa su ricerche prima di esplorare la percezione umana di tattile e vibro-tattile di feedback 3,5,6, e 'stato sviluppato per l'uso in due studi precedenti 10,11. Gli ultimi due studi impiegate questo protocollo per esaminare gli effetti della frequenza di vibrazione e posizione sulla precisione e la tempestività delle risposte degli utenti in amputati degli arti inferiori, dimostrando che entrambi i parametri influenzano in modo significativo le misure di esito, e che un alto grado di precisione di risposta possono essere raggiunto. Questi risultati possono essere utilizzati per informare la collocazione ideale di contattori in studi futuri e le applicazioni cliniche dei sistemi vibro-tattile ASF. Altri lavori recenteCrea et al. 12 esaminato sensibilità all'utente di cambiamenti nei modelli di vibrazione applicate alla coscia durante la deambulazione, con risposte verbali per indicare cambiamenti percepiti ai modelli di vibrazione, piuttosto che una risposta motoria. Mentre queste risposte verbali possono essere utilizzati per misurare la precisione di rilevamento, non rappresentano errori e ritardi che possono essere presenti nel processo di controllo del motore.
La configurazione principale per i seguenti esperimenti consiste di un numero di motori vibranti collegati a impulsi a larghezza modulata pin di uscita di un microcontrollore. La scheda è, a sua volta, controllato attraverso una connessione Universal Serial Bus (USB) a un computer che esegue il software di progettazione di sistema disponibile in commercio. I motori richiedono un circuito amplificatore aggiuntivo per assicurare una tensione sufficiente e la corrente viene fornita in un ampio intervallo di frequenze di vibrazione. Un circuito amplificatore esempio è mostrato in Figura 1. Il transistor bipolare a giunzione (BJR) In figura può essere sostituito con transistor a effetto di campo più piccolo metallo-ossido-semiconduttore (MOSFET) per un funzionamento più efficiente e più piccolo formato. Allo stesso modo, l'intero circuito amplificatore può essere sostituito da un driver del motore aptico off-the-shelf per fornire un controllo supplementare e dimensioni ridotte. Ogni motore richiede un proprio circuito, e utilizzando le attrezzature elencate in questo documento, fino a dieci motori può essere controllato da un singolo microcontrollore.
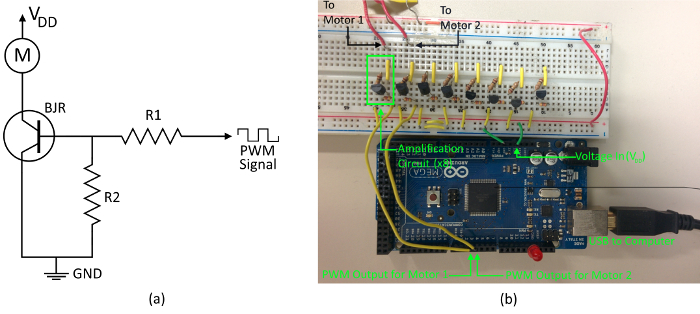
È mostrato Figura 1. Il motore elettrico. (A) Il circuito di amplificazione di un singolo motore di vibrazione. Ogni motore richiede un circuito separato e deve essere collegato ad una porta di uscita PWM unico sul microcontrollore. Il V DD qui rappresenta la potenza 3,3 V fornita dalla scheda microcontrollore, e la resistenza R2 serve come un oppositore di pull-down per garantire l'interruttore a transistor rimane aperto quando la tensione zero è appmentito. (B) Un esempio di cablaggio fisico di due motori. Sebbene otto circuiti di amplificazione individuali sono mostrati solo due sono collegati a motori a vibrazione. In questo protocollo R1 = 4,7 kΩ e R2 = 100 k. Cliccate qui per vedere una versione più grande di questa figura.
