Sablage est une étape importante dans le processus de fabrication, car la surface métallique brute reflète en évidence la lumière de l'endoscope, ce qui rend impossible pour les cercles à détecter. Il est difficile de distinguer les cercles , même à l'œil nu (voir figure 5). A noter que la surface de la cible a déjà été montré gravé au laser. Toutefois, cela ne diminue pas la réflexion lumineuse.
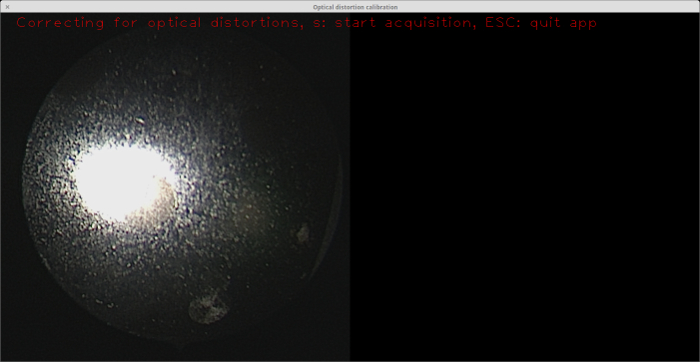
Figure 5: cible d'étalonnage sans sablage appliqué. Comme on le voit à partir de la vue de l'endoscope sur la gauche, l'éclat de la lumière de l'endoscope sur la surface du matériau, il est difficile, même pour l'œil nu de distinguer les cercles (il y a un cercle juste au sud-est de la grande réflexion). A noter que la surface de cette cible ( par exemple, le "blanc") a déjà été gravé, mais cela ne utile en l'absence de jet de sable. S'il vous plaît cliquer ici pour voir une version plus grande de cette figure.
Avant le motif de gravure, il est également important pour graver la surface de l'échantillon. Cela est nécessaire parce que la surface sablée a beaucoup de réflexions spéculaires (voir figure 6), ce qui interfère avec la détection de blob.
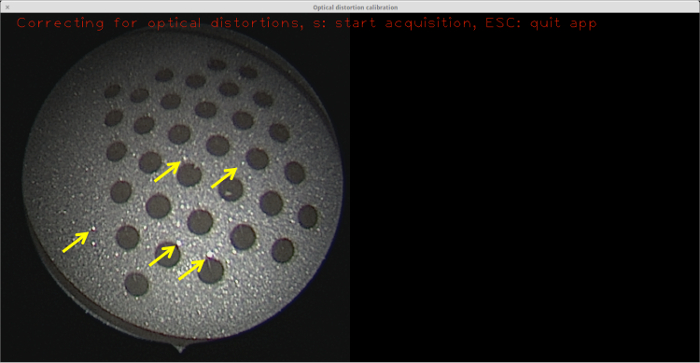
Figure 6: surface sablée sans gravure. Bien que pas aussi important que la surface du métal brut, relativement petites réflexions spéculaires (dont certains sont mis en évidence avec des flèches jaunes) sont toujours suffisantes pour empêcher la détection de blob de réussir, donc pas de calibration peuvent être effectuées avec cet objectif.Arget = "_ blank"> S'il vous plaît cliquer ici pour voir une version plus grande de cette figure.
L'application du laser à des vitesses différentes donne différentes couleurs de fond. La couleur de fond joue un rôle important dans le contraste entre les cercles et l'arrière-plan. Par conséquent, il est essentiel de déterminer la couleur de fond optimal. A cet effet, une plaque avec des cercles gravés sur un ensemble de différentes origines a été créé (voir Figure 7). Les milieux ont été testés à l' aide du module de détection de caractéristique de OpenCV 23, qui est utilisé dans la caméra OpenCV module d'étalonnage 17. Dans ce travail, la cible est en acier inoxydable, comme il est le matériau le plus commun et fiable utilisé dans les cliniques pour les dispositifs médicaux. Ce matériau est librement disponible, peu coûteux, robuste et facile à stériliser. D'autres matériaux pourraient être utilisés pour la cible de calibrage, tels que les métaux d'aluminium ou iodés, mais ceci est le scope des travaux futurs.
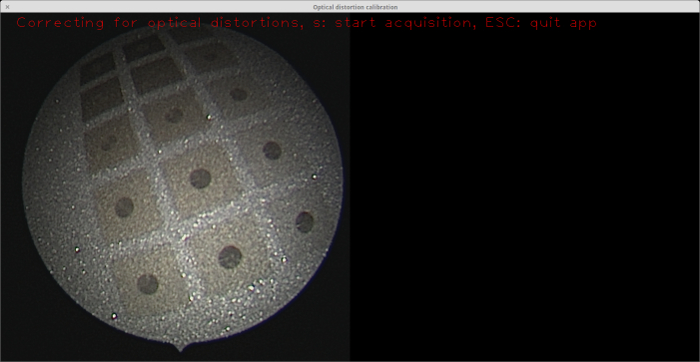
Figure 7: Plaque en acier inoxydable avec une palette de différentes couleurs de fond gravé au laser. Des expériences pratiques ont été menées conjointement avec le module OpenCV de détection de caractéristiques pour déterminer quelle couleur de fond donne le résultat optimal en termes de blob à contraste de fond 23. La vue de l'endoscope sur la gauche montre la plaque. Les couleurs de fond modérés (ceux d' autres que ceux les plus sombres et les plus légers) dans cette palette donnent une meilleure détection de blob. S'il vous plaît cliquer ici pour voir une version plus grande de cette figure.
Un des avantages de ce travail est que d'effectuer un étalonnage en utilisant la cible fabriquée prend 2-3 min. La plupart des efforts vontes à stabiliser manuellement l'endoscope pour obtenir des vues décent du motif d'étalonnage. L'utilisation d'un porte-endoscope sur mesure pourrait éliminer la nécessité d'une stabilisation manuelle, ce qui pourrait à son tour de réduire considérablement le temps d'étalonnage.

Vidéo 1: Vidéo montrant comment optique calibration distorsion peut être effectuée en utilisant la cible de calibrage développé conjointement avec le logiciel Endocal. S'il vous plaît cliquer ici pour voir cette vidéo. (Faites un clic droit pour télécharger.)
Un avantage de notre travail par rapport aux travaux de Wengert et al. La figure 15 est que la caméra OpenCV module d'étalonnage 17 peut être utilisé tel quel pour l' étalonnage, sans nécessiter de modification ou de coutume paramèrisation. Parce que OpenCV est un logiciel bien établi et bien entretenu et est très populaire dans la communauté de vision par ordinateur, en utilisant elle élimine le besoin pour l'écriture et la maintenance des logiciels personnalisés. Pour la commodité du lecteur, une application graphique compact est fourni 16, que le lecteur peut facilement installer et utiliser pour tester de nouvelles cibles d'étalonnage. Un inconvénient de notre méthode par rapport à Wengert et al. 15 est que leur méthode est plus robuste aux occlusions de la configuration, car il ne nécessite pas la détection de toutes les taches.
Initialement, une cible de calibrage avec un motif en damier a été fabriqué pour ce travail. Cependant, ce type de cible d'étalonnage avéré ne pas convenir dans des expériences en raison de la difficulté de détecter les angles des carrés du damier. La détection d'angle repose sur la base histogramme image binarisation (voir le code source de OpenCV 24). Cette impse trouve la nécessité d'un contraste de couleur claire entre les carrés sombres et claires, qui ne pouvait pas être garantie avec notre motif en damier, en partie due à des réflexions spéculaires, comme ceux montrés sur la figure 6. Ces réflexions spéculaires sont présents même après fond gravure; Cependant, la détection des cercles semble être moins sensible à cette lacune.
Dans la configuration actuelle, seules vues perpendiculaires de la cible d'étalonnage permettent la détection de blob réussie. Ceci est dû aux réflexions spéculaires de la surface cible entraver la détection blob à des angles obliques. Nous travaillons à améliorer encore la cible de manière à permettre l'acquisition de points de vue à une plus large gamme d'angles, ce qui pourrait améliorer la qualité des étalonnages effectués 20.
Dans le temps réel du placenta mosaicing canalisation qui a déjà été proposée 11, le calcul de la transla formation qui mappe des paires d'images repose sur la détection réussie et le regroupement des fonctions. distorsions optiques, d'autre part, provoquent un groupe de fonctionnalités avec une géométrie rigide apparaisse différente à travers des images. En conséquence, cette différence conduit à des inexactitudes dans les transformations calculées, qui causent des dérives dans les mosaïques d'images résultantes. Parce que les distorsions optiques les plus importants sont présents vers les bords, les images endoscopiques sont actuellement coupées à leurs régions les plus intimes. Une bonne correction des distorsions optiques serait potentiellement permettre l'incorporation d'une plus grande partie de chaque image dans le processus de mosaïquage. L'avantage de ce procédé est double. Tout d'abord, cela augmenterait le nombre de caractéristiques détectées dans chaque image, ce qui pourrait améliorer le calcul des transformations d'image. En second lieu, il permettrait la totalité de la surface anatomique cible à reconstituer dans un temps plus court.
