Sandblasting निर्माण की प्रक्रिया में एक महत्वपूर्ण कदम है क्योंकि कच्चे धातु की सतह प्रमुखता से एंडोस्कोप प्रकाश को दर्शाता है, यह असंभव हलकों पता लगाया जा करने के लिए कर रही है। यह भी नग्न आंखों के साथ हलकों भेद करना मुश्किल है (चित्रा 5 देखें)। ध्यान दें कि दिखाए गए लक्ष्य की सतह पहले से ही एक लेजर के साथ etched गया था। हालांकि, इस प्रकाश प्रतिबिंब को कम नहीं करता।
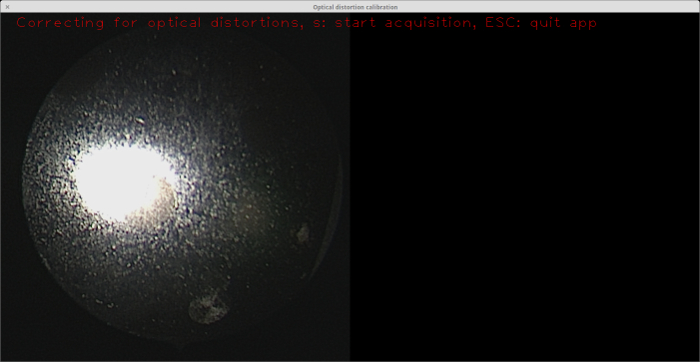
चित्रा 5: नहीं Sandblasting साथ कैलिब्रेशन लक्ष्य आवेदन किया। के रूप में छोड़ दिया पर एंडोस्कोप दृष्टि से देखा, सामग्री की सतह पर एंडोस्कोप प्रकाश से चमक यह मुश्किल नग्न आंखों हलकों में भेद करने के लिए भी बनाता है (सिर्फ बड़े प्रतिबिंब के दक्षिण में एक चक्र है)। ध्यान दें कि इस लक्ष्य की सतह (यानी, "पृष्ठभूमि") पहले से ही etched गया था, लेकिन यह नहीं है sandblasting के अभाव में मददगार। यह आंकड़ा का एक बड़ा संस्करण देखने के लिए यहां क्लिक करें।
पैटर्न नक़्क़ाशी करने से पहले, यह भी पूरी नमूना की सतह खोदना करने के लिए महत्वपूर्ण है। इसका कारण यह है sandblasted सतह कई specular प्रतिबिंब है, जो बूँद का पता लगाने के साथ हस्तक्षेप (चित्रा 6 देखें) आवश्यक है।
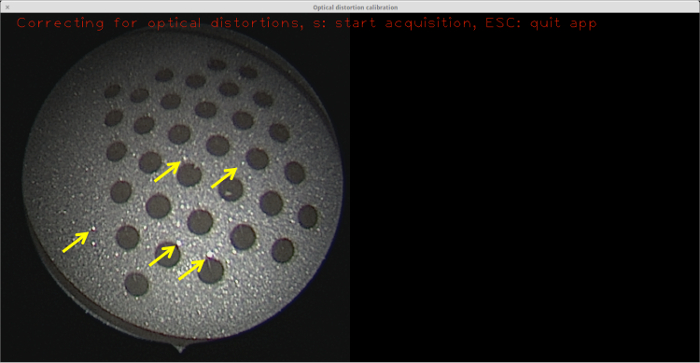
चित्रा 6: कोई नक़्क़ाशी के साथ sandblasted सतह। हालांकि कच्चे धातु की सतह के रूप में के रूप में प्रमुख नहीं, अपेक्षाकृत छोटे specular प्रतिबिंब (जिनमें से कुछ पीले तीर के साथ डाला जाता है) फिर भी, सफल होने से बूँद पता लगाने को रोकने के लिए पर्याप्त हैं तो कोई अंशांकन इस लक्ष्य के साथ किया जा सकता है।arget = "_blank"> यह आंकड़ा का एक बड़ा संस्करण देखने के लिए यहां क्लिक करें।
अलग गति में लेजर लागू करने के अलग-अलग पृष्ठभूमि रंग देता है। पृष्ठभूमि रंग हलकों और पृष्ठभूमि के बीच इसके विपरीत में एक महत्वपूर्ण भूमिका निभाता है। इसलिए, यह इष्टतम पृष्ठभूमि रंग निर्धारित करने के लिए महत्वपूर्ण है। इस उद्देश्य के लिए, हलकों के साथ एक थाली अलग पृष्ठभूमि (7 चित्रा देखें) बनाया गया था की एक सेट के खिलाफ etched। पृष्ठभूमि में OpenCV 23 है, जो OpenCV कैमरा अंशांकन मॉड्यूल 17 में प्रयोग किया जाता है का पता लगाने की सुविधा मॉड्यूल का उपयोग कर परीक्षण किया गया। इस काम में, लक्ष्य स्टेनलेस स्टील से बनाया गया था, के रूप में यह सबसे आम है और विश्वसनीय चिकित्सा उपकरणों के लिए क्लीनिक में प्रयुक्त सामग्री है। इस सामग्री को स्वतंत्र रूप से उपलब्ध है, महंगा नहीं, मजबूत, और बाँझ करने के लिए आसान है। अन्य सामग्री संभवतः ऐसे एल्यूमीनियम या आयोडीन युक्त धातुओं के रूप में, अंशांकन लक्ष्य के लिए इस्तेमाल किया जा सकता है, लेकिन इस SCOP हैभविष्य के काम के ई।
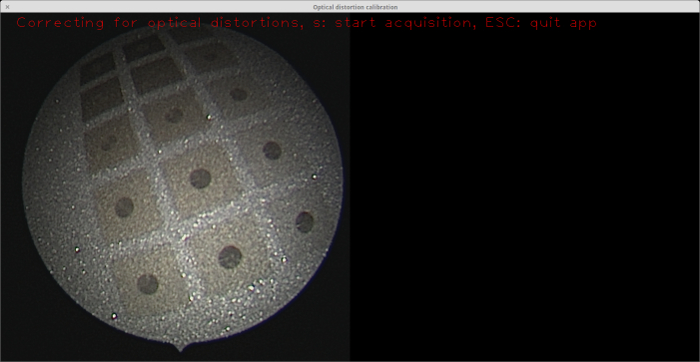
चित्रा 7: स्टेनलेस स्टील प्लेट लेजर के साथ etched अलग पृष्ठभूमि रंग की पट्टी की विशेषता है। व्यावहारिक प्रयोगों OpenCV पता लगाने की सुविधा मॉड्यूल निर्धारित करने के लिए जो पृष्ठभूमि रंग बूँद करने वाली पृष्ठभूमि विपरीत 23 के मामले में इष्टतम परिणाम देता है के साथ संयोजन के रूप में आयोजित की गई। बाईं तरफ एंडोस्कोप देखें प्लेट से पता चलता है। मध्यम पृष्ठभूमि रंग (यानी, अन्य उन अंधेरी और सबसे हल्का है कि लोगों को) इस पैलेट में बेहतर बूँद का पता लगाने निकलेगा। यह आंकड़ा का एक बड़ा संस्करण देखने के लिए यहां क्लिक करें।
इस काम के लाभ में से एक यह है कि एक अंशांकन गढ़े लक्ष्य का उपयोग कर प्रदर्शन कर 2-3 मिनट लेता है। प्रयास का सबसे जानातों मैन्युअल एंडोस्कोप स्थिर करने के लिए अंशांकन पैटर्न के सभ्य विचारों प्राप्त करने के लिए। एक कस्टम निर्मित एंडोस्कोप धारक का उपयोग मैनुअल स्थिरीकरण, जो बारी में काफी अंशांकन समय कम हो सकता है की आवश्यकता को समाप्त कर सकता है।

वीडियो 1: वीडियो दिखा कैसे ऑप्टिकल विरूपण अंशांकन endocal सॉफ्टवेयर के साथ मिलकर विकसित अंशांकन लक्ष्य का उपयोग किया जा सकता है। इस वीडियो को देखने के लिए यहां क्लिक करें। (डाउनलोड करने के लिए राइट क्लिक करें।)
हमारे काम का एक लाभ यह वेनगर्ट एट अल के काम की तुलना में। 15 OpenCV कैमरा अंशांकन मॉड्यूल 17 के रूप में जांच के लिए इस्तेमाल किया जा सकता है कि, किसी भी संशोधन या कस्टम parame की आवश्यकता के बिना हैterization। क्योंकि OpenCV एक अच्छी तरह से स्थापित है और अच्छी तरह से बनाए रखा सॉफ्टवेयर पैकेज है और कंप्यूटर दृष्टि समुदाय में बहुत लोकप्रिय है, यह लिख रहे हैं और कस्टम सॉफ्टवेयर को बनाए रखने के लिए की आवश्यकता समाप्त उपयोग कर। पाठक की सुविधा के लिए, एक कॉम्पैक्ट जीयूआई आवेदन 16 प्रदान की जाती है, जो पाठक को आसानी से स्थापित करने और नए अंशांकन लक्ष्यों का परीक्षण करने के लिए उपयोग कर सकते हैं। वेनगर्ट एट अल की तुलना में हमारे विधि का एक नुकसान। 15 कि उनकी विधि, पैटर्न के अवरोध को और अधिक मजबूत है, क्योंकि यह सभी चारों का पता लगाने की आवश्यकता नहीं है।
प्रारंभ में, एक बिसात पैटर्न के साथ एक अंशांकन लक्ष्य इस काम के लिए निर्मित किया गया था। हालांकि, अंशांकन लक्ष्य के इस प्रकार बिसात वर्गों के कोने का पता लगाने में कठिनाई के कारण प्रयोगों में अनुपयुक्त साबित हुई। कोने का पता लगाने हिस्टोग्राम आधारित छवि binarization (OpenCV स्रोत कोड 24 देखें) पर निर्भर करता है। यह छोटा सा भूतअंधेरे और प्रकाश चौराहों, आंशिक रूप से specular प्रतिबिंब के कारण हमारे बिसात पैटर्न के साथ की गारंटी है जो नहीं किया जा सका, 6 चित्र में दिखाया लोगों की तरह बीच एक स्पष्ट रंग विपरीत के लिए जरूरत है। इस तरह के specular प्रतिबिंब पृष्ठभूमि नक़्क़ाशी के बाद भी मौजूद हैं; हालांकि, हलकों का पता लगाने के कम इस कमी के प्रति संवेदनशील होने लगता है।
मौजूदा सेटअप में, अंशांकन लक्ष्य का केवल सीधा विचारों सफल बूँद का पता लगाने के लिए अनुमति देते हैं। इस लक्ष्य की सतह परोक्ष कोण पर बूँद का पता लगाने में बाधा से specular प्रतिबिंब के कारण है। हम आगे के लक्ष्य में सुधार करने के लिए इतनी के रूप कोण की एक व्यापक रेंज है, जो संभावित प्रदर्शन किया calibrations 20 की गुणवत्ता में सुधार कर सकता है पर विचारों के अधिग्रहण के लिए अनुमति देने के लिए काम कर रहे हैं।
वास्तविक समय में अपरा पाइप लाइन है कि पहले 11 प्रस्तावित किया गया था, ट्रांस की गणना mosaicingगठन के उस छवि जोड़े के नक्शे सफल पता लगाने और सुविधाओं के समूह पर निर्भर करता है। ऑप्टिकल विकृतियों, दूसरे हाथ पर, एक कठोर ज्यामिति के साथ सुविधाओं के एक समूह छवियों भर में विभिन्न प्रकट करने के लिए कारण। एक परिणाम के रूप में, इस अंतर को गणना परिवर्तनों, जो कारण परिणामस्वरूप छवि मोज़ाइक में drifts में अशुद्धियों की ओर जाता है। क्योंकि सबसे प्रमुख ऑप्टिकल विकृतियों किनारों की ओर मौजूद हैं, इंडोस्कोपिक छवियों वर्तमान में अपने अंतरतम क्षेत्रों के लिए उत्पन्न होते हैं। ऑप्टिकल विकृतियों के लिए एक अच्छा सुधार संभावित mosaicing प्रक्रिया में प्रत्येक छवि का एक बड़ा हिस्सा के समावेश के लिए अनुमति होगी। इस विधि का लाभ दो गुना है। सबसे पहले, यह प्रत्येक छवि में पाया सुविधाओं की संख्या में वृद्धि संभावित छवि परिवर्तनों की गणना में सुधार होगा। दूसरा, यह पूरे लक्ष्य संरचनात्मक सतह के लिए अनुमति देने के एक छोटे समय में खंगाला होगा।
