Our system has been tested on its ability to patch cells in acute brain slices, mouse induced Pluripotent Stem Cells (iPSCs) differentiated into neurons, and HEK 293 cells artificially expressing channels of interest. Figure 3 shows an experiment using Thy1-ChR2-YFP transgenic mice (B6.Cg-Tg(Thy1-COP4/EYFP)18Gfng/J) targeting fluorescently labeled layer 5 pyramidal neurons in the visual cortex. The target cell was one of the automatically identified green fluorescent-positive cells (Figure 3b). Figure 3a is the Differential Interference Contrast (DIC) image of the patched neuron. The whole-cell configuration was achieved by the automatic patching protocol in steps 2.5 – 2.6 and was validated by step current injection-induced action potentials (Figure 3c)
To demonstrate the additional "Command Sequence" function, we delivered 500 mM KCl for 200 ms to three locations on a brain slice while patching a cell (Figure 4). First, we selected 3 locations on the brain slice: one close to the patched cell body and two far away from the patched cell. The coordinates were stored in the "Memory Positions" GUI. The coordinates were loaded to the "Command Sequence" GUI under "Unit1," which was the manipulator that the KCl-containing pipette was mounted on. We set the commands in the left column to send a +5-V TTL signal for 500 ms, followed by 0 V for 10 s (Figure 4a), from port A channel 0 on the secondary DAQ board, which was connected to the digitizer "start trigger" input. Figure 4c shows that the patched cell was a regular spiking neuron. The drug application pipette (Unit 1) traversed the three selected locations automatically (Figure 4b), and we recorded 10 s for each application under voltage-clamp (Figure 4d). The color of the traces in Figure 4d corresponds to the border color in Figure 4b. When KCl was puffed at the cell, a large inward current was observed, which slowly diminished as KCl diffused. Red fluorescent dye was added to the KCl solution to indicate the spatial distribution of drug delivery and was imaged using combined DIC and epifluorescent imaging. This experiment illustrated the ease and flexibility of our system to control manipulator/microscope movement and external hardware through TTL signals.
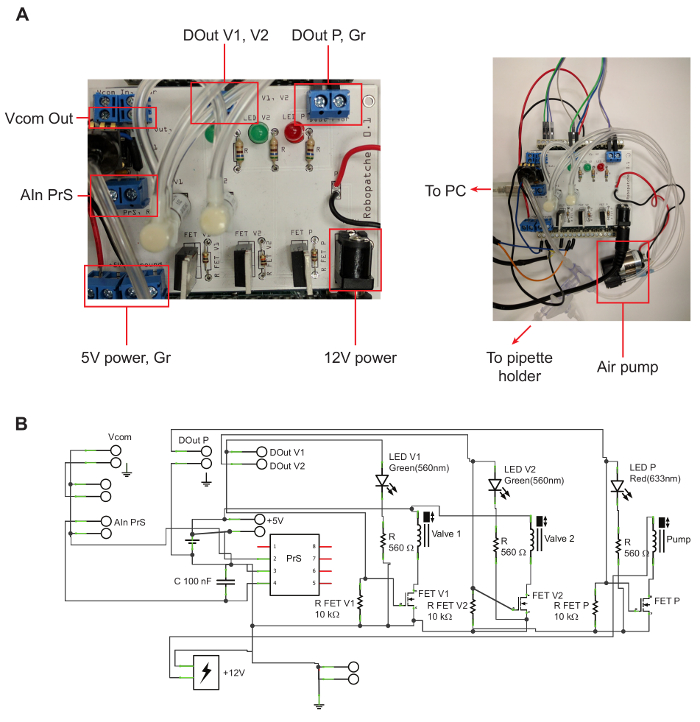
Figure 1. Pressure Control Unit. A: Printed Circuit Board (PCB) for connecting the valves, pressure sensor, and air pump. The left shows details on the PCB, labeling locations of outputs that are mentioned in the protocol. The right shows the connection between the PCB and the air pump, USB port, and tubing. B: Circuit map for the PCB. Please click here to view a larger version of this figure.
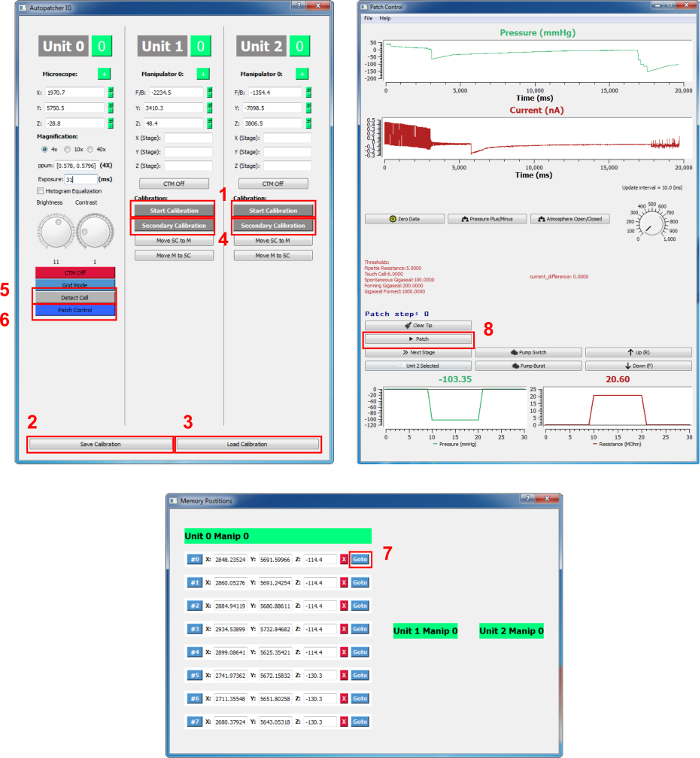
Figure 2. Autopatcher GUI. The buttons mentioned in the protocol are shown in red squares and are numbered. 1: Start Calibration, 2: Save Calibration, 3: Load Calibration, 4: Secondary Calibration, 5: Detect Cell, 6: Patch Control, 7: Go to (target cell coordinate), and 8: Patch. Please click here to view a larger version of this figure.
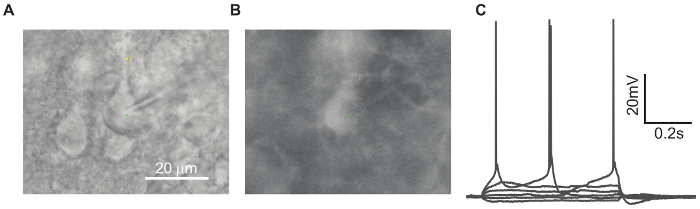
Figure 3. An Example of the Patched ChR2-YFP-positive Cell. A: 40X magnification under DIC optics. B: Epifluorescence image of the same cell in panel A (LED illumination at 488 nm). C: Current-clamp recordings from the patched cell during a series of hyperpolarizing and depolarizing step current injections. Please click here to view a larger version of this figure.
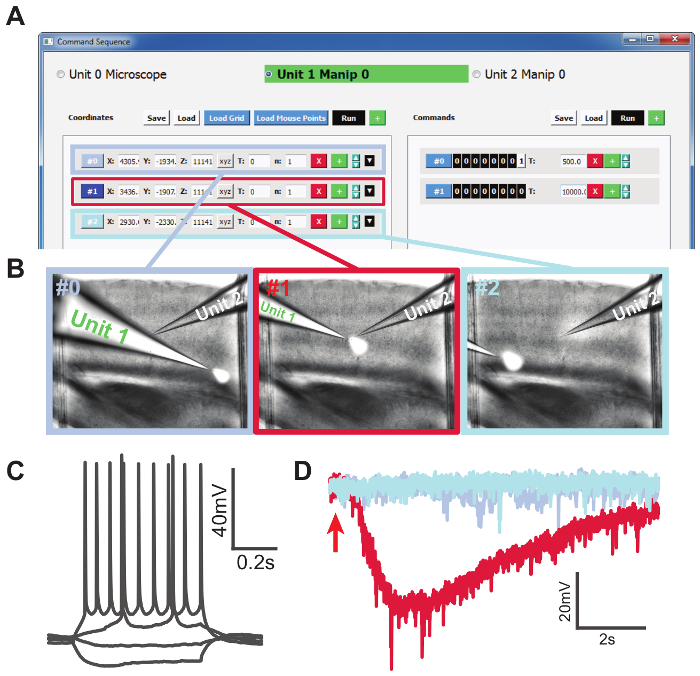
Figure 4. Conducting an Automated Drug Delivery Experiment. A: Selected locations loaded to the "Command Sequence" GUI. The left column shows the list of coordinates, and the right column shows the list of commands in the form of TTL signals for each location. B: Screenshots during the drug application experiment corresponding to the three selected locations. Unit 1 was the KCl-containing pipette and Unit 2 was the patching pipette. KCl solution was mixed with red fluorescent dye for the purpose of visualization. Images were obtained by combining DIC and fluorescence imaging. C: Step current injections showing a regular spiking neuron. D: Voltage-clamp recording traces from the local application of 500 mM KCl solution at three locations. The red trace with inward current was recorded from the trial when KCl application was close to the patched cell. The red arrow indicates the timing of KCl application. Please click here to view a larger version of this figure.
| Outlet on the PCB | Port name on the DAQ board | Port # on DAQ board | Remark |
| DOUT V1 | Port A channel 1 | 22 | Control valve 1 |
| DOUT V2 | Port A channel 2 | 23 | Control valve 2 |
| DOUT P | Port A channel 3 | 24 | Control air pump |
| Gr | Ground | 29 | Ground |
Table 1. Printed Circuit Board (PCB) to secondary data acquisition (DAQ) board connection configuration. Use this table to connect PCB outputs (first column from left) to ports on the DAQ board (second column from left). The port name and number on the secondary DAQ refer to single-ended mode.
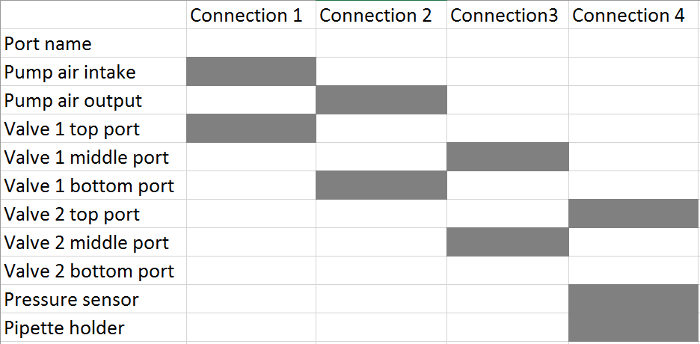
Table 2. Tubing Connections from the Pressure Control Unit to the Pipette Holder(s). For each connection, connect the corresponding ports, highlighted with a grey box, using soft tubing (see the Table of Materials).
