Studiando le architetture portanti strutture biologiche (LBBSs), come shell e dell’osso, gli ingegneri hanno sviluppato nuovi materiali compositi che sono sia forte e duro 1. È stato dimostrato che le notevoli proprietà meccaniche di LBBSs e le loro controparti di bio-ispirati sono legate alla loro intricati architetture interne 2. Tuttavia, le relazioni tra proprietà meccaniche e architetture LBBS completamente non sono capite. Misurando la risposta meccanica di un LBBS è il primo passo verso la comprensione di come la sua architettura migliora le proprietà meccaniche.
Tuttavia, è importante che il tipo di test utilizzato per misurare la risposta meccanica di un LBBS è coerenza con la sua funzione meccanica. Ad esempio, poiché le piume devono supportare carichi aerodinamici, la funzione primaria di un rachide di piuma è per fornire rigidità flessionale 3. Pertanto, una prova di flessione è preferibile a una prova di tensione uniassiale per misurare la risposta meccanica. In effetti, molti LBBSs — come piuma rachidi 3, erba nasce 4e spicole 5,6,7,8— principalmente di deformazione di flessione. Questo è perché questi LBBSs sono snella —cioè, la loro lunghezza è molto più di loro larghezza o profondità. Tuttavia, eseguendo prove di flessione su questi LBBSs è impegnativo, perché le forze e spostamenti che possono sopportare prima di guastarsi vanno da 10-2 a 102 N e 10-4 a 10-3 m, rispettivamente 3 , 4 , 5 , 7 , 8. di conseguenza, il dispositivo utilizzato per eseguire queste prove meccaniche dovrebbe avere forza e spostamento risoluzioni di â10-5 N e â10-7 m (cioè, 0,1% di forza massima misurabile e di spostamento del sensore), rispettivamente.
Commercialmente disponibile, grande scala, sistemi di prova meccaniche in genere non è possibile misurare le forze e spostamenti con questa risoluzione. Mentre la forza atomica basata su microscopio 9,10 o microelettromeccanici basati su sistemi 11 dispositivi di prova hanno risoluzione adeguata, la forza massima (rispettivo spostamento) possono misurare è più piccola il forza massima (rispettivo spostamento) che la LBBS in grado di sopportare. Pertanto, per eseguire prove di flessione su questi LBBSs, ingegneri e scienziati devono fare affidamento su Custom-Built meccanico test dispositivi 5,7,12,13. Il vantaggio principale di questi dispositivi su misura è che possono ospitare grandi intervalli di forze e spostamenti. Tuttavia, la costruzione e il funzionamento di questi dispositivi non è ben documentato nella letteratura.
Un protocollo è descritto per eseguire prove di flessione del tre-punto utilizzando un dispositivo di test meccanico su misura che può misurare le forze che vanno da 10-5 101 N e cilindrate da 10-7 a 10-2 m. Disegni tecnici, tra cui tutte le dimensioni, dei componenti del dispositivo di prova meccanico sono forniti nel materiale supplementare. Il vantaggio principale di questo dispositivo di prova meccanico è che le gamme di forza e spostamento possono essere facilmente adattate LBBSs diversi. Principio di funzionamento del dispositivo è simile a quella di un di microscopio atomico della forza 9. In questo dispositivo, un campione viene inserito attraverso una trincea tagliata in una piastra in acciaio inox (Vedi Figura 1A-C). L’intervallo della trincea è misurata da Micrografie ottiche per essere 1278 ± 3 µm (media ± deviazione standard; n = 10). I bordi di trincea sostengono il provino durante una prova di flessione (Vedi Figura 1e D). Questa fase del campione viene attaccata ad una fase di traduzione di tre assi e posizionata sotto un cuneo di alluminio in modo che il cuneo è situato a metà strada attraverso arco di trincea (Vedi Figura 1C). Spostando il palco  direzione (Vedi Figura 1Ae C), il campione viene spinto nel cuneo causando l’esemplare per piegare.
direzione (Vedi Figura 1Ae C), il campione viene spinto nel cuneo causando l’esemplare per piegare.
Ci riferiamo al cuneo come la punta del punto di carico (LPT) e il componente del dispositivo che contiene il cuneo come il punto di carico (LP). il LP è fissato all’estremità di una trave a mensola cui dislocamento è misurata da un sensore di spostamento ottica della fibra (FODS). Il FODS emette luce infrarossa che viene riflessa su uno specchio situato sulla superficie superiore del LP (Vedi Figura 1B) e ricevuto da una fibra ottica nella FODS. Un pezzo quadrato di mm ≈5 di un wafer di silicio lucido è usato come lo specchio di LP e viene apposto al LP mediante resina epossidica. Il FODS misura spostamenti confrontando l’intensità della luce emessa e riflessa. La rigidità a sbalzo e lo spostamento vengono utilizzati per calcolare la forza,  , esperto di Cuneo a causa della sua interazione con il campione. Lo spostamento a sbalzo è utilizzato anche per calcolare lo spostamento della sezione trasversale del provino sotto il cuneo,
, esperto di Cuneo a causa della sua interazione con il campione. Lo spostamento a sbalzo è utilizzato anche per calcolare lo spostamento della sezione trasversale del provino sotto il cuneo,  . Sensori di forza basato su cantilever sono stati utilizzati in una serie di micro – e macro-scala meccanica test studi 10,11,12,13,14. Il design specifico qui presentato è adattato da un dispositivo meccanico di test utilizzato per l’esecuzione di esperimenti di contatto adesivo 14. Un design simile è stato utilizzato anche in un micro-tribometro commercialmente disponibili 15,16.
. Sensori di forza basato su cantilever sono stati utilizzati in una serie di micro – e macro-scala meccanica test studi 10,11,12,13,14. Il design specifico qui presentato è adattato da un dispositivo meccanico di test utilizzato per l’esecuzione di esperimenti di contatto adesivo 14. Un design simile è stato utilizzato anche in un micro-tribometro commercialmente disponibili 15,16.
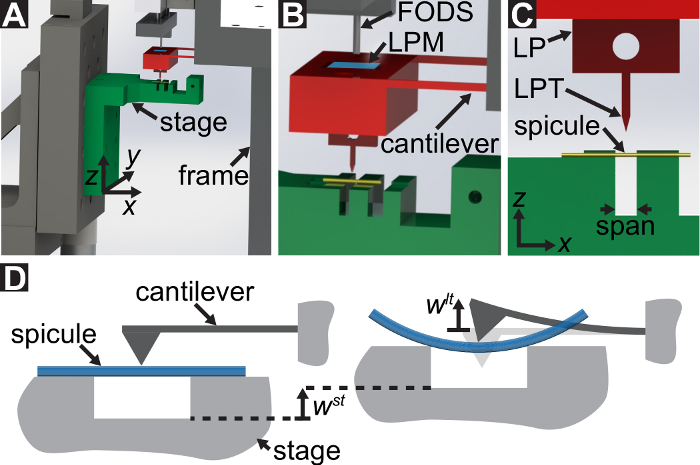
Figura 1: Panoramica del dispositivo di prova meccanico fuoriserie. (A) A rendering di progettazione assistita da elaboratore del dispositivo. I componenti di fase sono evidenziati in verde. La forza di rilevamento sottoassieme (sbalzo, punto di carico (LP)) è evidenziata in rosso. (B) una visualizzazione di (A) ingrandita. Lo specchio di LP è indicato in blu sulla superficie superiore del LP sotto il FODS ed è etichettato LPM. (C) il sistema di coordinate usato per descrivere il moto della fase di traduzione. Di livellamento thfase e nel passaggio 1,9 del protocollo, il direzione viene fatto coincidere con il vettore normale alla superficie dello specchio LP. (D) una schematica della configurazione di piegatura del tre-punto mostrando la deformazione del dello spicule e gli spostamenti misurati  , e
, e  . Clicca qui per visualizzare una versione più grande di questa figura.
. Clicca qui per visualizzare una versione più grande di questa figura.
Vengono illustrate le funzionalità del dispositivo eseguendo prove di flessione del tre-punto sugli elementi scheletrici di spugna marina Euplectella aspergillum6,7. Lo scheletro di questa spugna è un assemblaggio di filamenti, chiamati spicole (Vedi Figura 2A). Le spicole sono ≈50 µm di spessore e sono composte principalmente da silice 6. Spicules basati su Biosilica si trovano in spugne appartenenti alle classi Demospongiae, Homosclerophorida e Hexactinellida. Spugne, come E. Aspersorio, che appartengono alla classe Hexactinellida sono noti anche come “vetro spugne..” Mentre le spicole di spugne di vetro sono composti principalmente di silice, è stato dimostrato che la silice contiene spesso una matrice organica composta sia collagene 17,18 o chitina 19,20 , 21. questa matrice organica svolge un ruolo importante in silice biomineralization 18,20. Inoltre, in alcune spicole matrice organica serve anche come un modello per la biomineralizzazione di calcio 22. Oltre a essere distribuito all’interno della silice, la matrice organica può anche formare strati distinti che la partizione di silice di spicula in lamelle concentriche, cilindrico 6,23. È stato dimostrato che questa architettura concentrica, lamellare può influenzare deformazione comportamento 6,7,8,24,25,26 degli spicules . Di conseguenza, proprietà meccaniche degli spicules sono determinati da una combinazione di loro chimica (cioè., la struttura chimica del composto di silice-proteina) e la loro architettura 27. La struttura chimica e l’architettura di spicole di spugna di vetro sono ancora sotto indagine 24,28,29.
La maggior parte di spicules in E. Aspersorio sono stata saldata insieme per formare una rigida gabbia scheletrica. Tuttavia, alla base dello scheletro c’è un ciuffo di molto lungo gli spicules (â10 cm) noto come le spicole di ancoraggio (Vedi Figura 2A). Descriviamo il protocollo per l’esecuzione di prove di flessione di tre punti su piccole sezioni delle spicole di ancoraggio.
Nel passaggio 1 del protocollo, è descritta la procedura per il montaggio e allineamento dei componenti del dispositivo test meccanico su misura. Passaggi 2 e 4 del protocollo forniscono istruzioni per generare i dati di calibrazione utilizzati per calcolare le forze e spostamenti nella prova di flessione. I passi compiuti per preparare una sezione di una spicula e montarlo al supporto di prova descritti nel passaggio 3. La procedura per lo svolgimento della prova di flessione sulla sezione dello spicule è descritta nel passaggio 5. Infine, nella sezione Risultati rappresentante i dati di taratura ottenuti nei passaggi 2 e 4 sono utilizzati insieme ai dati di test di piegatura ottenuti nel passaggio 5 per calcolare e .
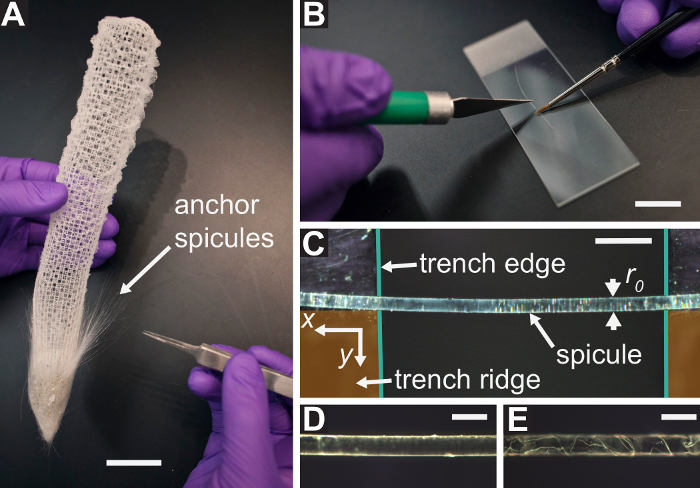
Figura 2: Procedura per sezionamento e ispezionare gli spicules E. Aspersorio. (A) lo scheletro di E. Aspersorio. Il ciuffo di spicole di ancoraggio autoportante è mostrato alla base dello scheletro. La barra della scala è di ~ 25 mm. (B) una spicula singolo ancoraggio è tenuto sul posto su un vetrino da microscopio utilizzando un pennello di martora rossa #00000 e sezionati usando una lama di rasoio. La barra della scala è ~ 12 mm. (C) una sezione di un aspersorio E. spicula disposti attraverso la trincea sul palco del campione. I bordi di trincea e la cresta di trincea sono evidenziati in verde acqua e arancio, rispettivamente. La spicula è spinto contro la cresta di trincea per garantire che il suo asse è perpendicolare ai bordi trincea. (D) una microfotografia di una spicula che passa la procedura di ispezione descritta nel punto 3.4 del protocollo, che viene descritto come determinare se una sezione dello spicule è danneggiata e deve essere eliminata. (E) A micrografo di una spicula contenente molte crepe e mancano grandi sezioni di strati di silice che verrebbe a mancare la procedura di ispezione descritta nel punto 3.4 del protocollo. Scala bar = 250 µm (C), 100 µm (D) e 100 µm (E). Clicca qui per visualizzare una versione più grande di questa figura.
