Согласно данным, выявленным Глобальными оценками здравоохранения в 2016 году, дорожно-транспортный травматизм является восьмой причиной глобальной смертности, что приводит к 1,4 миллиона смертей вовсем мире 1. В 2018 году 39,2% дорожно-транспортных происшествий были столкновения с автотранспортными средствами в транспорте, и 7,2% из которых были задние столкновения. Решением проблемы повышения безопасности транспортных средств и дорожного движения является разработка передовой системы помощи водителю (ADAS) для предупреждения водителей о потенциальных опасностях. Данные показали, что ADAS может значительно снизить скорость столкновений заднего конца, и это еще более эффективно, когда оснащен автоматической тормозной системой2. Кроме того, с развитием автономных транспортных средств, меньше человеческого участия будет необходимо для управления транспортным средством, что делает take-over запрос (TOR) система предупреждения необходимость, когда автономное транспортное средство не регулирует себя. Конструкция системы предупреждения ADAS и TOR в настоящее время является важной частью технологии для водителей, чтобы избежать неминуемой аварии в течение нескольких секунд. В образцовом эксперименте использовался вибрирующий инструментарий наряду с платформой моделирования вождения для изучения того, какое местоположение будет генерировать наилучший результат, когда вибротактильной системы предупреждения была использована в качестве потенциальной системы предупреждения ADAS и TOR.
Классифицированные по каналам восприятия, как правило, существуют три типа условий предупреждения, то есть визуальные, слуховые и тактильные. Каждый механизм предупреждения имеет свои достоинства и ограничения. Когда системы визуального предупреждения используются, водители могут страдать отвизуальной перегрузки 3,ухудшая производительность вождения из-заневнимательной слепоты 4,5. Хотя слуховая система предупреждения не влияет на поле зрения водителей, ее эффективность во многом зависит от окружения, таких как фоновая музыка и другие шумыв среде вождения 6,7. Таким образом, ситуации, содержащие другую внешнюю слуховую информацию или значительныйшум,могут привести кневнимательной глухоте 8,9,снижению эффективности слуховой системы оповещения. Для сравнения, системы тактильных предупреждений не конкурируют с визуальной или слуховой обработкой водителей. Посылая вибротактильные предупреждения водителям, системы тактильных предупреждений преодолевают ограничения систем визуального и слухового предупреждения.
Предыдущие исследования показали, что тактильные предупреждения могут принести пользу водителям, сокращая время реакции на тормоза. Было также установлено, что тактильные системы предупреждения дают болееэффективный результат над визуальными 10,11 и слуховыми 12,13,14 системами предупреждения в определенных ситуациях. Тем не менее, ограниченные исследования были сосредоточены на исследовании оптимального местоположения для размещения тактильного устройства предупреждения. Согласно гипотезе сенсорнойкоры 15 и гипотезесенсорного расстояния 16, образцовое исследование выбрало области пальца, запястья и виска в качестве экспериментальных мест для размещения тактильного устройства предупреждения. С введенным протоколом частота и время доставки вибрирующего предупреждения и интервалы между вибрациями вибрирующего инструментария могут быть настроены в соответствии с экспериментальными требованиями. Этот вибрирующий инструментарий состоял из главного чипа, чипа регулятора напряжения, мультиплексера, USB-адаптера Transistor-Transistor-Logic (TTL), транзистора Metal-Oxide-Semiconductor Field-Effect Transistor (MOSFET) и модуля Bluetooth. Количество вибрирующих модулей также может варьироваться в зависимости от потребностей исследователей, при этом одновременно вибрируют до четырех модулей. При реализации вибрирующего инструментария в экспериментах, связанных с вождением, он может быть настроен в соответствующие экспериментальные настройки, а также синхронизирован с данными о производительности вождения путем пересмотра кодов моделирования вождения.
В то время как для исследователей, проведение эксперимента вождения на виртуальной платформе является более возможным, чем в реальном мире из-за риска и связанных с этим затрат. Например, сбор показателей эффективности может быть затруднен, и трудно контролировать экологические факторы, связанные с экспериментами в реальном мире. В результате, многие исследования использовали фиксированной базы вождения тренажеры работает на ПК в последние годы в качестве альтернативы для проведения исследований на дороге вождения. После обучения, разработки и исследования в течение более 11 лет в сообществе исследований вождения, мы создали платформу моделирования вождения с реальным автомобилем, который состоит из программного обеспечения моделирования вождения с открытым исходным кодом и аппаратного комплекта, включая рулевое колесо и коробку передач, три педали, три установленных проектора и три экрана проектора. С помощью программного обеспечения моделирования вождения поддерживает только один экран, представленный протокол используется только центральный проектор и проектор экран для проведения эксперимента.
Есть два основных преимущества использования представленной платформы моделирования вождения. Одним из преимуществ этой платформы является то, что она использует программное обеспечение с открытым исходным кодом. Используя удобный платформу с открытым исходным кодом, исследователи могут настроить моделирование и вибрирующий набор инструментов для своих уникальных исследовательских потребностей, сделав простую конфигурацию программного обеспечения без разработки кода. Путем пересматривать коды, исследователя могут создать управляя имитации которые обеспечивают относительную верность к реальности с множеством вариантов имеющихся на типах автомобиля, типах дороги, сопротивлении рулевого колеса, боковой и продольной турбулентности ветра, интерфейсах программы применения случая времени и тормоза (API) для внешней синхронизации средства программирования, и в реализации поведенческих парадигм such as автомобиль-следуя за задачей и задачей N-Back. Хотя проведение исследований, связанных с вождением в симуляторе вождения не может полностью повторить вождение в реальном мире, данные, собранные через симулятор вождения является разумным и был широкопринят исследователями 17,18.
Еще одним преимуществом предлагаемого симулятора вождения является его низкая стоимость. Как упоминалось ранее, введенное программное обеспечение моделирования вождения является открытым исходным кодом программного обеспечения, которое доступно для пользователей бесплатно. Кроме того, общая стоимость всей настройки оборудования в этом протоколе ниже по сравнению с типичными высокой точностью коммерческих симуляторов вождения. Рисунок 1 а и б показать полную установку двух симуляторов вождения со стоимостью от $ 3000 до $ 30000. В отличие от типичных высокой точности коммерческих симуляторов вождения (фиксированная база), как правило, стоят около $ 10000 до $ 100000. С его весьма доступной цене, этот симулятор вождения может быть популярным выбором не только для академических исследовательских целей, но и дляпроведения вождения классов 19 и для демонстрациисвязанных с вождением технологий 20,21.
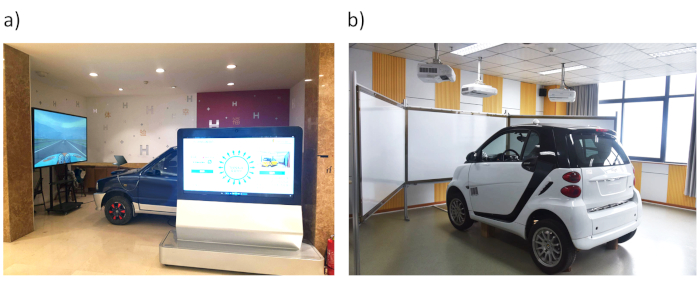
Рисунок 1: Изображение симуляторов вождения. Оба симулятора вождения состояли из рулевого колеса и коробки передач, трех педалей и транспортного средства. а) установка симулятора вождения стоимостью $3000, которая использовала 80-дюймовый LCD-экран с разрешением 3840 × 2160. b) установка симулятора вождения стоимостью 30000 долларов США, в которых использовались три установленных проектора и три проекторных экрана размером 223 х 126 см каждый. Проекционные экраны были расположены на высоте 60 см над землей и на 22 см от передней части транспортного средства. Для текущего эксперимента использовались только центральный проектор и проекторный экран. Пожалуйста, нажмите здесь, чтобы просмотреть большую версию этой цифры.
Программное обеспечение моделирования вождения и вибрирующий инструментарий в предлагаемом методе уже былииспользованы в предыдущих исследованиях нашими исследователями 22,23,24,25,26,27,28,29. Этот саморазвитый вибрирующий инструментарийв соответствии со стандартом ISO 30 может быть примененв различных областях 31,32 путемкорректировки частоты и интенсивности вибрации. Важно отметить, что была разработана и внедрена в следующем протоколе новая версия вибрирующего инструментария. Вместо того, чтобы регулировать частоту вибрации с помощью регулируемого адаптера напряжения, новая версия оснащена пятью различными частотами вибрации и может быть проще отрегулирована с помощью кодов, предусмотренных в дополнительном файле кодирования 1. Кроме того, представленный симулятор вождения предоставляет исследователям безопасный, недорогой и эффективный способ исследовать различные виды исследований, связанных с вождением. Таким образом, этот протокол подходит для исследовательских лабораторий, которые имеют ограниченный бюджет и имеют сильную потребность в настройке экспериментальной среды вождения.
