وحدة التحكم الحلقة القريبة الطبيعية
تتدفق المعلومات الحسية الحركية باستمرار بين الدماغ والجسم لإنتاج سلوكيات منسقة ومنظمة تنظيما جيدا. يمكن دراسة مثل هذه السلوكيات مع التركيز على تصرفات الشخص وحده ، كما هو الحال في أسلوب المونولوج(الشكل 1A)، أو أثناء الإجراءات الديناميكية المعقدة المشتركة بين اثنين من الوكلاء في dyad ، كما هو الحال في أسلوب الحوار(الشكل 1B). ومع ذلك ، فإن الخيار الثالث هو تقييم هذه التفاعلات المعقدة من خلال وحدة تحكم وكيل ، في سياق واجهة حلقة قريبة بين الإنسان والكمبيوتر(الشكل 1C). يمكن لمثل هذه الواجهة تتبع تقلبات الحركات لحظة بلحظة التي يساهم بها كل وكيل في الدياد ، ونوع التماسك الذي يخرج ذاتيا من تفاعلاته المتزامنة ، مما يساعد على توجيه إيقاعات الدياد بطرق مرغوبة.
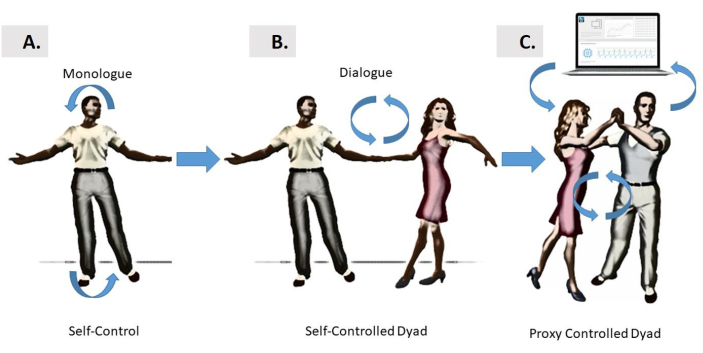
الشكل 1: أشكال مختلفة من السيطرة. (أ) تعتمد الواجهات الذاتية التي يسيطر عليها الدماغ على العلاقات الوثيقة الحلقة بين دماغ الشخص وجسم الشخص نفسه ، والتي يمكن أن تنظم نفسها وتتفاعل ذاتيا بأسلوب “مونولوج”. يحاول هذا الوضع التحكم في الحركات ذاتية المنشأ، أو قد يهدف أيضا إلى التحكم في الأجهزة الخارجية. (ب)يتم إدخال “الحوار” التحكم نمط لاثنين من الراقصين التي تتفاعل مع بعضها البعض ومن خلال entrainment المادية وأخذ بدوره لتحقيق السيطرة على حركات بعضهم البعض. (ج)“طرف ثالث” الحوار السيطرة على dyad كما هو مقدم بوساطة واجهة الكمبيوتر التي تسخر جنبا إلى جنب مع الإشارات الحيوية من كل من الراقصين ، parameterizes ذلك ويغذي مرة أخرى إلى الراقصين في شكل إعادة المعلمات باستخدام الصوت و / أو الرؤية كأشكال من التوجيه الحسي. تم تحقيق إعادة تحديد المعلمات في الأمثلة المعروضة هنا باستخدام ردود الفعل السمعية أو البصرية ، معززة بالإخراج الحركي الحركي في الوقت الحقيقي لأحد الراقصين للتأثير على الآخر ؛ أو من كلا الراقصين ، يتناوبون في بعض نمط بالتناوب. يرجى النقر هنا لعرض نسخة أكبر من هذا الرقم.
والهدف العام لهذه الطريقة هو إظهار أنه من الممكن تسخير، وتجسيد وإعادة تحديد المعلمات التقلبات لحظة بلحظة في الأنشطة الإيقاعات الحيوية للأجسام في الحركة، واثنين من وكلاء الانخراط في تبادل ثنائي الأبعاد التي قد تنطوي على اثنين من البشر، أو الإنسان والرمزية له / لها الذاتي تتحرك.
وقد ولدت التحقيقات حول كيفية الدماغ قد السيطرة على الإجراءات والتنبؤ عواقبها الحسية العديد من خطوط الاستفسارات النظرية في الماضي1،2،3 وأنتجت نماذج مختلفة من السيطرة العصبيةالحركية 4،5،6،7،8. وقد انطوى أحد خطوط البحث في هذا المجال المتعدد التخصصات على تطوير واجهات بين الدماغ والآلة أو الدماغ والكمبيوتر. هذه الأنواع من الاجهزة تقدم سبلا لتسخير وتكييف إشارات الجهاز العصبي المركزي للسيطرة على جهاز خارجي، مثل الذراع الروبوتية9،10،11،هيكل خارجي12،المؤشر على شاشة الكمبيوتر13 (من بين أمور أخرى). تشترك كل هذه الأجهزة الخارجية في الخاصية التي ليس لديها ذكاء خاص بها. بدلا من ذلك ، فإن الدماغ الذي يحاول السيطرة عليها لديه ، وجزء من المشكلة التي يواجهها الدماغ هو تعلم كيفية التنبؤ بعواقب الحركات التي يولدها في هذه الأجهزة (على سبيل المثال ، حركات المؤشر ، وحركات الذراع الروبوتية ، وما إلى ذلك) مع توليد حركات داعمة أخرى تساهم في ردود الفعل الحركية الحسية الشاملة في شكل إعادة الاتساق الحركي. في كثير من الأحيان ، كان الهدف الشامل لهذه الواجهات هو مساعدة الشخص الذي يقف وراء ذلك الدماغ على تجاوز إصابة أو اضطراب ، لاستعادة تحويل أفكاره المتعمدة إلى أفعال جسدية يتم التحكم فيها بإرادة الجهاز الخارجي. ومع ذلك كان أقل شيوعا تطوير واجهات التي تحاول توجيه تحركات الهيئات في الحركة.
الكثير من البحوث الأصلية على واجهات الدماغ والآلة التركيز على السيطرة على الجهاز العصبي المركزي (CNS) على أجزاء الجسم التي يمكن أن تنجز الإجراءات الموجهة نحو الهدف9،14،15،16،17. ومع ذلك، هناك حالات أخرى يكون فيها استخدام الإشارات المستمدة من أنشطة الجهاز العصبي المحيطي (PNS)، بما في ذلك أنشطة الجهاز العصبي اللاإرادي (ANS)، مفيدا بما يكفي للتأثير على إشارات العوامل الخارجية وتوجيهها، بما في ذلك الإنسان أو الصورة الرمزية الأخرى، أو حتى البشر المتفاعلين (كما هو الحال في الشكل 1C). على عكس الذراع الروبوتية أو المؤشر ، فإن العميل الآخر في هذه الحالة ، لديه ذكاء يقوده دماغ (في حالة الصورة الرمزية التي وهبت بحركات الشخص ، أو عميل آخر ، في حالة وجود ثني بشري متفاعل).
الإعداد الذي يخلق بيئة من التفاعل بين حلقة قريبة التكيف المشترك مع تبادل dyadic قد تكون ذات فائدة للتدخل في اضطرابات الجهاز العصبي حيث الدماغ لا يمكن السيطرة بإرادة الجسم نفسه في الحركة في الإرادة، على الرغم من عدم وجود قطع جسديا الجسر بين الجهاز العصبي المركزي وPNS. قد يكون هذا هو الحال بسبب الإشارات الطرفية الصاخبة حيث حلقات التغذية المرتدة لمساعدة الدماغ رصد مستمر وضبط الإيقاعات الحيوية الذاتية المولدة الخاصة بها قد تعطلت. هذا السيناريو ينشأ في المرضى الذين يعانون من مرض باركنسون18,19, أو في المشاركين الذين يعانون من اضطرابات طيف التوحد مع الضوضاء الزائدة في إخراجها الحركي. في الواقع، في كلتا الحالتين، قمنا بقياس مستويات عالية من نسبة الضوضاء إلى الإشارة في الإشارات الحركية العائدة المستمدة من سرعة حركاتها المقصودة20و21و22 ومن القلب23. في مثل هذه الحالات، قد تؤدي محاولة السيطرة على الدماغ للإشارات الخارجية، مع محاولة التحكم في الجسم في الحركة، إلى إشارة ذاتية التفاعل من تيار المعلومات (إعادة الارتجاف) الذي يتلقى الدماغ من تيار المحرك المستمر (الفوار) في المحيط. في الواقع ، فإن التقلبات لحظة بلحظة موجودة في مثل هذا التيار الحركي الفوار الذاتي المولدة تحتوي على معلومات مهمة مفيدة للمساعدة في التنبؤ بالعواقب الحسية للإجراءات الهادفة24. عندما تلف هذه التغذية المرتدة من الضوضاء، يصبح من الصعب تحديث إشارات التحكم بشكل متوقع وجسر الخطط المتعمدة مع الأفعال المادية.
إذا كان لنا أن تمديد هذه التغذية المرتدة حلقة إلى وكيل آخر والسيطرة على تفاعلات الشخص والوكيل من خلال طرف ثالث (الشكل 1C)، قد يكون لدينا فرصة لتوجيه أداء بعضها البعض في الوقت الحقيقي القريب. وهذا من شأنه أن يوفر لنا دليلا على المفهوم بأننا سنحتاج إلى توسيع مفهوم الواجهات بين الدماغ والجسم أو الدماغ والآلة التكيفية المشتركة لعلاج اضطرابات الجهاز العصبي التي تؤدي إلى ضعف إدراك الإرادة البدنية من النية العقلية.
الإجراءات الهادفة لها عواقب، والتي تتميز بدقة من قبل التوقيعات العشوائية الحركية التي تعتمد على السياق وتمكين الاستدلال على مستويات النية العقلية مع اليقين العالي25،26. وبالتالي ، فإن ميزة الطريقة الجديدة التي تستفيد من التبادل الديادي على النهج السابقة التي تركز على الشخص لآلة الدماغ أو واجهات الكمبيوتر في الدماغ ، هي أنه يمكننا زيادة إشارات التحكم لتشمل الإيقاعات الحيوية الجسدية والقلبية التي تمر إلى حد كبير تحت وعي الشخص ، تحت مستويات مختلفة من النية. وبهذه الطريقة، ونحن تخفيف التدخل التفاعلي أن السيطرة واعية يميل إلى استحضار في عملية التكيف مع الدماغ المؤشر السيطرة17. ويمكننا أن نضيف المزيد من اليقين إلى العملية التنبؤية من خلال تحديد المعلمات المختلفة للإشارات التي يمكننا الوصول إليها. على هذا المنوال، يوجد العمل السابق باستخدام إشارات الدماغ والذات في جنبا إلى جنب27،28،29؛ ولكن العمل الذي ينطوي على التفاعلات dyadic التي استولت عليها إشارات الدماغ الجسم لا تزال نادرة. علاوة على ذلك ، فإن الأدب موجود لم يحدد بعد التمييز بين الأجزاء المتعمدة من العمل الذي يتم تنفيذه تحت الوعي الكامل والحركات الانتقالية التي تحدث تلقائيا نتيجة للحركات المتعمدة30،31. هنا نقوم بهذا التمييز في سياق التبادل الديادي ، ونقدم طرقا جديدة لدراسة هذا الانقسام32، مع تقديم أمثلة على حركات مصممة رقصات (متعمدة) مقابل حركات مرتجلة (عفوية) في مساحة الرقص.
بسبب تأخير النقل والنقل في التكامل الحسي الحركي وعمليات التحول33، فمن الضروري أن يكون مثل هذا الرمز التنبؤي في مكان ، لتعلم توقع المدخلات الحسية القادمة مع اليقين العالي. وتحقيقا لتلك هذا الأمر، من المهم أن نكون قادرين على توصيف تطور نسبة الضوضاء إلى الإشارة المستمدة من الإشارات في تيار إعادة الالتواء الحركي الذي يجري تحديثه باستمرار. ثم نحتاج إلى بروتوكولات لقياس التغير في التغير الحركي بشكل منهجي. التباين موجود بطبيعته في التقلبات لحظة بلحظة من تيار المحرك فويرنت المنتهية ولايته34. وبما أن هذه الإشارات غير ثابتة وحساسة للاختلافات السياقية35،36، فمن الممكن تحديد التغيرات التي تحدث مع تعديلات في سياق المهام. لتقليل التداخل من الإشارات التفاعلية التي تنشأ من التحكم في CNS الواعي ، واستحضار تغييرات قابلة للقياس الكمي في تيار PNS الحركي الفوار ، نقدم هنا واجهة حلقة قريبة بالوكالة تغير بشكل غير مباشر ردود الفعل الحسية ، من خلال تجنيد الإشارة الطرفية التي تتغير إلى حد كبير تحت الوعي الذاتي للشخص. ثم نعرض طرقا لقياس التغيير الذي يترتب على التلاعب الحسي بشكل منهجي ، باستخدام التحليلات العشوائية القابلة لتصور العملية التي تثيرها واجهة الحلقة القريبة الوكيلة بشكل غير مباشر في كلا العميلين.
تقديم وحدة تحكم حلقة إغلاق الوكيل
التغيرات الحسية الحركية الموجودة في الإشارات الطرفية تشكل مصدرا غنيا للمعلومات لتوجيه أداء الجهاز العصبي في حين التعلم والتكيف والتعميم تجري عبر سياقات مختلفة37. تظهر هذه الإشارات جزئيا كمنتج ثانوي ل CNS في محاولة للتحكم في الإجراءات بمحض إرادتها ولكنها ليست الهدف المباشر لوحدة التحكم. وبما أن الشخص يتفاعل بشكل طبيعي مع الآخرين، يمكن تسخير الإشارات الطرفية وتوحيدها وإعادة تحديد معلماتها؛ وهذا يعني أن الاختلافات يمكن أن تكون ذات معلمات وتحول بشكل منهجي، كما يغير المرء تيار المحرك فوير الذي يدخل باستمرار النظام كما reafference الحركية. في مثل هذه الإعدادات، يمكننا تصور التحولات العشوائية، والتقاط بدقة عالية إشارة غنية التي فقدت خلاف ذلك لأنواع من المتوسط الكبير أن التقنيات التقليدية أكثر أداء.
لتحقيق توصيف التغيير في إطار النظام الأساسي الإحصائي الجديد ، نقدم هنا بروتوكولات وأنواع بيانات موحدة وتحليلات تسمح بدمج المدخلات الحسية الخارجية (السمعية والبصرية) مع الإشارات الحركية ذاتية الإنشاء داخليا ، في حين يتفاعل الشخص بشكل طبيعي مع شخص آخر ، أو مع نسخة رمزية من الشخص. في هذا المعنى، لأننا نهدف إلى السيطرة على الإشارات الطرفية (بدلا من تعديل إشارات CNS للتحكم مباشرة في الجهاز الخارجي أو وسائل الإعلام)، ونحن عملة هذا الوكيل واجهة حلقة قريبة(الشكل 2). ونحن نهدف إلى وصف التغيرات في الإشارات العشوائية ل PNS، لأنها تؤثر على تلك الموجودة في الجهاز العصبي المركزي.
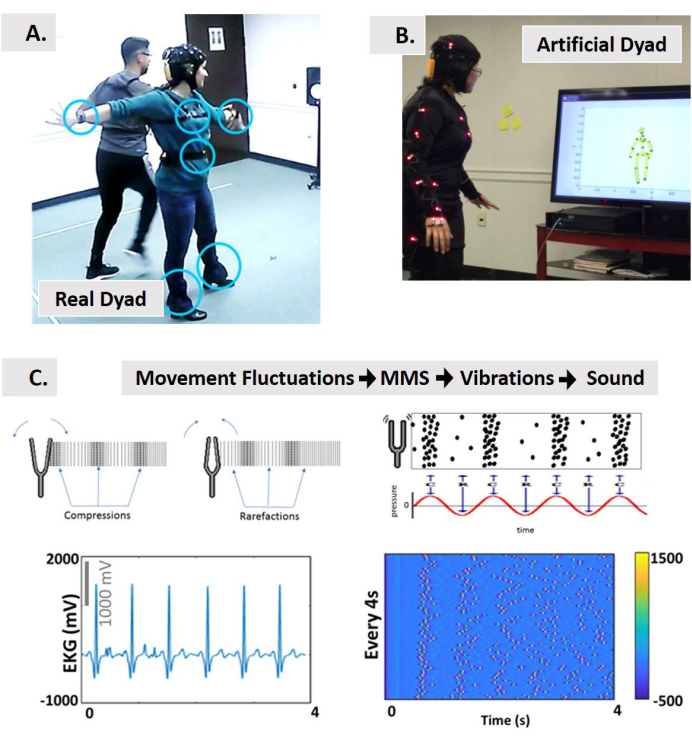
الشكل 2: التحكم بالوكالة من التفاعل dyadic باستخدام حلقة وثيقة واجهة متعددة مشروط. (أ) السيطرة غير المباشرة على اثنين من الراقصين (الرقص السالسا) عن طريق واجهة الكمبيوتر التكيفية المشتركة مقابل (ب) ثنائي الأبعاد الاصطناعية التفاعلية شخص الرمزية التي تسيطر عليها تسخير إشارات الجهاز العصبي المحيطي وإعادة المعلمة على أنها أصوات و / أو كمدخلات بصرية. (ج)مفهوم السونيشن باستخدام نوع بيانات موحد جديد (طفرات الحركة الصغرى، MMS) المستمدة من التقلبات لحظة بلحظة في سعة الإشارات البهائية الحيوية / توقيت تحويلها إلى اهتزازات ومن ثم إلى الصوت. من الفيزياء ، ونحن نستعير مفاهيم الضغط والنادرة التي تنتجها شوكة ضبط إخراج soundwave والاهتزازات قابلة للقياس. مخططات الموجات الصوتية ممثلة بالضغط المعدل مع مرور الوقت بالتوازي مع تركيزات الارتفاع للتسونية. مثال على إشارة مادية للخضوع لخط الأنابيب المقترح من MMS إلى الاهتزازات والسوناتة. نحن نستخدم إشارة معدل ضربات القلب كمدخل إلى الواجهة. وهذا يأخذ التقلبات في اتساع الإشارة محاذاة لبداية الحركة كل 4 ثوان من الحركة ويبني القطارات MMS تمثل الاهتزازات. يتم توحيد القطارات ارتفاع من MMS من [0,1]. لون المسامير وفقا لشريط الألوان، يمثل كثافة الإشارة. ثم نقوم بتجسيد هذه الاهتزازات باستخدام Max. يمكن استخدام هذه الإشارة sonified للعب مرة أخرى في A، أو لتغيير في B التفاعلات مع الصورة الرمزية. علاوة على ذلك ، في B ، من الممكن تضمين الصوت في البيئة واستخدام موضع الجسم لتشغيل الصوت مرة أخرى في منطقة الاهتمام (RoI) ، أو تعديل ميزات الصوت كدالة للمسافة إلى RoI أو سرعة أو تسريع جزء من الجسم يرتكز على جزء آخر من الجسم ، عند المرور من قبل RoI. يرجى النقر هنا لعرض نسخة أكبر من هذا الرقم.
يمكن تسخير إشارات PNS غير الغازية مع تقنيات الاستشعار التي يمكن ارتداؤها التي تشارك في تسجيل تيارات متعددة الوسائط من طبقات وظيفية مختلفة من الجهاز العصبي ، بدءا من اللاإرادي إلىالطوعي 32. يمكننا بعد ذلك قياس التغيرات في مثل هذه الجداول في الوقت الحقيقي تقريبا واختيار أولئك الذين تعزز تغييراتهم نسبة الإشارة إلى الضوضاء. ويمكن بعد ذلك زيادة هذه الإشارة الحركية الفوارة بأشكال أخرى من التوجيه الحسي (على سبيل المثال، السمعية والبصرية، وما إلى ذلك) لأن إشارات PNS سكيب الوعي الكامل، فهي أسهل للتلاعب دون مقاومة كبيرة 38. على هذا النحو، ونحن نستخدمها للمساعدة في توجيه أداء الشخص بطرق قد تكون أقل إرهاقا للنظام البشري.
بناء واجهة
نقدم تصميم التحكم الوكيل بوساطة واجهة متعددة الوسائط متعددة الوسائط متعددة التكيف. هذه الواجهة توجه ردود الفعل متعددة الآراء في الوقت الحقيقي. يعرض الشكل 3 التصميم العام.
تتميز واجهة الحلقة القريبة ب 5 خطوات رئيسية. الخطوة الأولى هي جمع البيانات متعددة الوسائط من أدوات متعددة يمكن ارتداؤها. الخطوة الثانية هي تزامن تيارات متعددة الوسائط من خلال النظام الأساسي LabStreamingLayer (LSL، https://github.com/sccn/labstreaminglayer) التي وضعتها مجموعة MoBI 39. الخطوة الثالثة هي تدفق بنية بيانات LSL إلى Python أو MATLAB أو واجهة لغة برمجة أخرى لدمج الإشارات وتجريب الميزات الفسيولوجية (ذات الصلة بإعدادنا التجريبي) في الوقت الفعلي. الخطوة الرابعة هي إعادة تحديد المعالم المختارة المستخرجة من التدفق المستمر للإشارة الجسدية التي تمت دراستها وزدها باستخدام طريقة اختيار حسية (على سبيل المثال ، البصرية والسمعية والحركية ، وما إلى ذلك) لتشغيلها مرة أخرى في شكل أصوات أو صور ، لزيادة أو استبدال أو تعزيز الطريقة الحسية التي تمثل مشكلة في الجهاز العصبي للشخص. وأخيرا، فإن الخطوة الخامسة هي إعادة تقييم التوقيعات العشوائية للإشارات التي يولدها النظام في الوقت الحقيقي، لتحديد الطريقة الحسية التي تجلب التحولات العشوائية للتقلبات الجسدية إلى نظام من اليقين العالي (تقليل الضوضاء) في التنبؤ بالعواقب الحسية للعمل الوشيك. يتم تشغيل هذه الحلقة بشكل مستمر طوال مدة التجربة مع التركيز على الإشارة المختارة ، مع تخزين الأداء الكامل للتحليلات اللاحقة (كما هو موضح في مخططات الشكل 3 وانظر40،41،42،43،44،45،46،47 كمثال على التحليلات الخلفية).
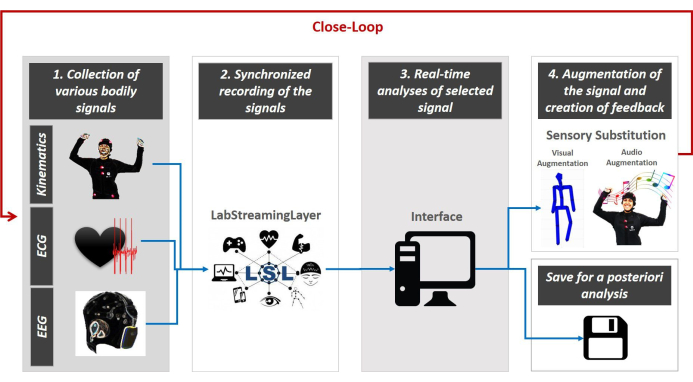
الشكل 3: بنية مفهوم واجهة الحلقة القريبة متعددة الوسائط. يتم جمع إشارات جسدية مختلفة – البيانات الحركية، ونشاط القلب والدماغ (الخطوة 1). يستخدم LSL لتسجيل البيانات الواردة من معدات مختلفة إلى الواجهة (الخطوة 2) بشكل متزامن. يستخدم بيثون/ماتلاب/C# رمز لتحديد التقلبات في الإشارات باستمرار باستخدام نوع بيانات موحد ومقياس مشترك يمكن من اختيار مصدر التوجيه الحسي الأكثر ملاءمة للحد من عدم اليقين في النظام (الخطوة 3). هذا التعزيز في الوقت الحقيقي من إرسال إشارة من خلال قناة (ق) مختارة ثم يسمح إعادة تحديد المعلمة للإشارة الحسية إعادة الداخل لدمج في تيار المحرك المستمر وتعزيز تيار المدخلات المفقودة أو التالفة (استبدال الحسية الخطوة 4). إعادة التقييم المستمر يغلق الحلقة (الخطوة 5) ونحفظ جميع البيانات للتحليلات المستقبلية الإضافية. يرجى النقر هنا لعرض نسخة أكبر من هذا الرقم.
تعرض الأقسام التالية البروتوكول العام لكيفية بناء واجهة حلقية قريبة (كما هو موضح في الشكل 3)وتصف النتائج التمثيلية لواجهات تجريبية اثنين (معروضة بشكل متقن في المواد التكميلية) تتضمن التفاعل ثنائي الحلقة المادي بين راقصين (نظام حلقة قريبة حقيقي) والتفاعل ثنائي الحلقة الظاهري بين الشخص والرمزية (نظام الحلقة القريبة الاصطناعية).
