Door het bestuderen van de platforms van dragende biologische structuren (LBBSs), zoals shell en bot, hebben de ingenieurs ontwikkeld nieuwe samengestelde materialen die zowel sterk en taai 1. Het is aangetoond dat de opmerkelijke mechanische eigenschappen van LBBSs en hun tegenhangers bio-geïnspireerde zijn gerelateerd aan hun ingewikkelde interne platforms 2. De relaties tussen LBBS platforms en mechanische eigenschappen worden echter niet volledig begrepen. Het meten van de mechanische reactie van een LBBS is de eerste stap naar inzicht in hoe de architectuur verbetert de mechanische eigenschappen.
Het is echter belangrijk dat het type test gebruikt voor het meten van een LBBS mechanische antwoord met haar mechanische functie strookt. Bijvoorbeeld, omdat veren aërodynamische ladingen steunen moeten, is de primaire functie van de spil van een veer bedoeld als buigsterkte stijfheid 3. Een buigmoment test daarom verkiezen boven een eenassige spanning test voor het meten van de mechanische reactie. In feite, vele LBBSs — zoals veer rachises 3, gras stengels 4en botsplinters 5,,6,,7,8— vooral vervormen door buigen. Dit is omdat deze LBBSs slanke zijn —dat wil zeggen, de lengte is veel groter dan hun breedte of diepte. Echter, buigende tests uitvoeren op deze LBBSs is uitdagend omdat de krachten en verplaatsingen die ze kunnen weerstaan voordat van 10-2 tot en met 10 variëren-2 N en 10-4 tot 10-3 m, respectievelijk 3 , 4 , 5 , 7 , 8. daarom het apparaat gebruikt voor het uitvoeren van deze mechanische tests moeten de resoluties van de kracht en de verplaatsing van ≈10-5 N en ≈10-7 m (dat wil zeggen, 0,1% van de maximale measureable kracht en de verplaatsing van de sensor), respectievelijk.
Verkrijgbare, grote schaal, mechanische testen systemen meestal niet meten krachten en verplaatsingen met deze resolutie. Atomaire kracht Microscoop gebaseerde 9,10 of microschakelaars systemen gebaseerde 11 testen apparaten hebben voldoende resolutie, de maximale kracht (respectieve verplaatsing) ze kunnen meten weliswaar kleiner dan de maximale kracht (respectieve verplaatsing) die de LBBS kunnen weerstaan. Daarom, buigende om test te voeren op deze LBBSs, de ingenieurs en de wetenschappers moet vertrouwen op custom-built mechanische testen apparaten 5,7,12,13. Het belangrijkste voordeel van deze custom-built apparaten is dat zij grote reeksen van krachten en verplaatsingen aankan. Echter, de bouw en de exploitatie van deze apparaten is niet goed gedocumenteerd in de literatuur.
Een protocol is beschreven voor het verrichten van drie-punt buigende proeven met behulp van een custom-built mechanische testen apparaat dat kan meten dwingt variërend van 10-5 tot 101 N en verplaatsingen variërend van 10-7 tot 10-2 m. Technische tekeningen, met inbegrip van alle dimensies van de componenten van het mechanische beproevingstoestel vindt u in het aanvullend materiaal. Het belangrijkste voordeel van dit mechanische testen apparaat is dat de kracht en de verplaatsing bereiken kunnen worden gemakkelijk aangepast aan verschillende LBBSs. Het werkingsprincipe van het apparaat is vergelijkbaar met die van een atomaire kracht Microscoop 9. In dit apparaat, een specimen wordt geplaatst in een greppel gesneden in een RVS plaat (Zie Figuur 1A-C). De spanwijdte van de trog is gemeten vanaf optische microfoto als 1278 ± 3 µm (gemiddelde ± standaardafwijking; n = 10). De randen van de loopgraaf ondersteunen het model tijdens een buigende test (Zie Figuur 1 c, en D). Dit monster stadium is gekoppeld aan een fase van drie assen vertaling en onder een aluminium wig zo geplaatst dat de wig halverwege de trog van de overspanning ligt (Zie Figuur 1C). Door het bewegen van de fase de  richting (Zie figuur 1A, en C), het model wordt geduwd in de wig waardoor het model om te buigen.
richting (Zie figuur 1A, en C), het model wordt geduwd in de wig waardoor het model om te buigen.
Verwijzen we naar de wig als de belasting punt tip (LPT) en het onderdeel van het apparaat dat de wig als het punt van de belasting (LP bevat). De LP is gekoppeld aan het einde van een cantilever wier verplaatsing wordt gemeten door een fiber optic verplaatsing sensor (FODS). Straalt infrarood licht, die wordt weerspiegeld op een spiegel gelegen op de bovenkant van de LP uit de FODS (Zie Figuur 1B) en ontvangen door een optische vezel in de FODS. Een ≈5 mm vierkant stuk een gepolijste silicium wafer wordt gebruikt als de LP-spiegel en op de LP met behulp van epoxy is aangebracht. De FODS meet verplaatsingen door het vergelijken van de intensiteit van het uitgestraalde en gereflecteerd licht. De cantilever stijfheid en verplaatsing worden gebruikt voor het berekenen van de kracht,  , ervaren door de wig als gevolg van de interactie met het model. De verplaatsing van de ‘ Freischwinger ‘ wordt ook gebruikt voor het berekenen van de verplaatsing van het specimen dwarsdoorsnede onder de wig,
, ervaren door de wig als gevolg van de interactie met het model. De verplaatsing van de ‘ Freischwinger ‘ wordt ook gebruikt voor het berekenen van de verplaatsing van het specimen dwarsdoorsnede onder de wig,  . Cantilever gebaseerde krachtsensors zijn gebruikt in een aantal micro – en macroschaal mechanische testen studies 10,11,12,13,14. Het specifieke ontwerp hier gepresenteerd is aangepast van een mechanische testen apparaat dat wordt gebruikt voor het uitvoeren van zelfklevende contact experimenten 14. Een soortgelijk ontwerp is ook gebruikt in een commercieel beschikbare micro-tribometer 15,16.
. Cantilever gebaseerde krachtsensors zijn gebruikt in een aantal micro – en macroschaal mechanische testen studies 10,11,12,13,14. Het specifieke ontwerp hier gepresenteerd is aangepast van een mechanische testen apparaat dat wordt gebruikt voor het uitvoeren van zelfklevende contact experimenten 14. Een soortgelijk ontwerp is ook gebruikt in een commercieel beschikbare micro-tribometer 15,16.
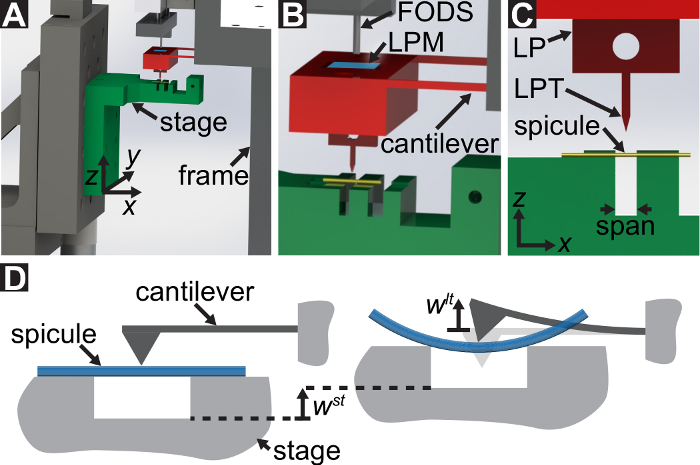
Figuur 1: overzicht van de op maat gemaakte mechanische beproevingstoestel. (A) A computer aided ontwerp weergave van het apparaat. De fase-onderdelen zijn gemarkeerd in het groen. De force sensing halffabrikaat (cantilever, belasting punt (LP)) wordt gemarkeerd in het rood. (B) een vergroot beeld van (A). De LP-spiegel wordt weergegeven in het blauw op de bovenkant van de LP onder de FODS en LPM is gemarkeerd. (C) het coördinatensysteem gebruikt om te beschrijven de motie van de fase van de vertaling. Door herverdeling van the fase in stap 1.9 van het protocol, de richting te laten samenvallen met de vector die loodrecht op het glasoppervlak van de LP-spiegel is gemaakt. (D) een schematische voorstelling van de drie-punt buigende configuratie weergegeven: de vervorming van de spicule en de gemeten verplaatsingen  , en
, en  . Klik hier voor een grotere versie van dit cijfer.
. Klik hier voor een grotere versie van dit cijfer.
Van het apparaat mogelijkheden worden gedemonstreerd door het verrichten van drie-punt buigende proeven op het skelet elementen van de mariene spons Euplectella Wijwaterkwast6,7. Deze spons het skelet is een samenstel van filamenten, genaamd botsplinters (Zie Figuur 2). De botsplinters zijn ≈50 µm dik en bestaat voornamelijk uit siliciumdioxide 6. Biosilica gebaseerde botsplinters worden aangetroffen in sponsen die behoren tot de klassen Demospongiae Homosclerophorida en Hexactinellida. Sponzen, zoals E. Wijwaterkwast, die behoren tot de klasse Hexactinellida staan ook bekend als “glas sponzen.” Terwijl de botsplinters van glas sponzen zijn voornamelijk samengesteld uit siliciumdioxide, is gebleken dat de silica vaak een organische matrix samengesteld uit beide collageen 17,18 of chitine 19,20 bevat , 21. deze organische matrix speelt een belangrijke rol in silica biomineralization 18,20. Bovendien in sommige botsplinters fungeert de organische matrix ook als een sjabloon voor de biomineralization van calcium 22. Naast uitgedeeld binnen de silica, kan de organische matrix ook vormen verschillende lagen die de spicule van silica in concentrische, cilindrische lamellen 6,23 verdelen. Het is aangetoond dat deze concentrische, lamellair architectuur kan invloed hebben op de botsplinters vervorming gedrag 6,7,8,24,25,26 . Bijgevolg de botsplinters mechanische eigenschappen worden bepaald door een combinatie van hun chemie (dwz., de chemische structuur van de samengestelde silica-eiwit) en hun het platform 27. Zowel de chemische structuur en de architectuur van glas spons botsplinters zijn nog in onderzoek 24,28,29.
Allermeest naar de botsplinters in E. Wijwaterkwast zijn samen aan een stijve skelet kooi formulier gecementeerd. Aan de voet van het skelet is er echter een plukje zeer lang (≈10 cm) botsplinters bekend als het anker botsplinters (Zie Figuur 2). We beschrijven het protocol voor het verrichten van buigende proeven van drie-punt op kleine secties van het anker botsplinters.
In stap 1 van het protocol, wordt de procedure voor het monteren en uitlijnen van de componenten van het mechanische custom-built beproevingstoestel beschreven. Stap 2 en 4 van het protocol bevatten instructies voor genereren kalibratiegegevens gebruikt voor het berekenen van de krachten en verplaatsingen in de buigende test. De stappen voor te bereiden van een deel van een spicule en mount het op de steun van de test zijn beschreven in stap 3. De procedure voor het uitvoeren van de buigende test op het spicule gedeelte is beschreven in stap 5. Ten slotte de kalibratiegegevens verkregen in de stappen 2 en 4 in de sectie Vertegenwoordiger resultaten gebruikt worden samen met de buigende testgegevens die worden verkregen in stap 5 om te berekenen en .
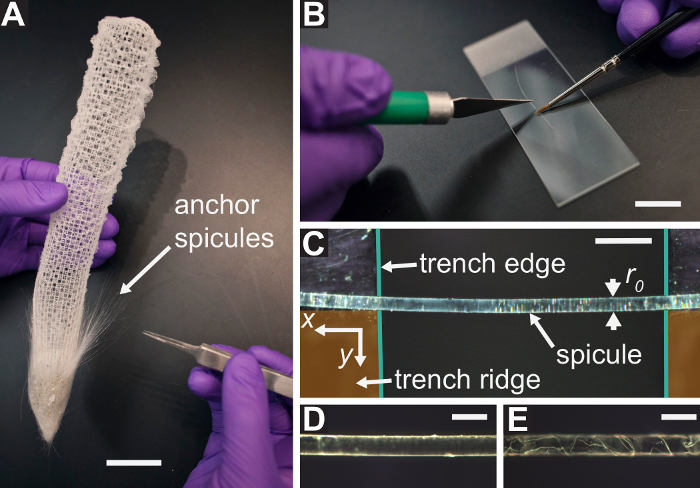
Figuur 2: Procedure voor segmenteren en inspectie van E. Wijwaterkwast botsplinters. (A) het skelet van E. Wijwaterkwast. Het plukje vrijstaande anker botsplinters wordt weergegeven aan de voet van het skelet. De schaal bar is ~ 25 mm. (B) een spicule van één anker wordt gehouden in de plaats op een microscoopglaasje met behulp van een #00000 rood sable borstel en gesegmenteerd met behulp van een scheermesje. De schaal bar is ~ 12 mm. (C) een deel van een spicule E. Wijwaterkwast over de loopgraaf in het werkgebied van de steekproef geplaatst. De loopgraaf randen en loopgraaf ridge worden gemarkeerd in groenblauw en oranje, respectievelijk. De spicule wordt geduwd tegen de loopgraaf ridge om ervoor te zorgen dat de as loodrecht op de randen van de Geul staat. (D) een opname van een spicule die loopt van de controleprocedure die is beschreven in stap 3.4 van het protocol, waarin wordt beschreven hoe om te bepalen of een sectie van de spicule is beschadigd en moet worden weggegooid. (E) A opname van een spicule met vele scheuren en ontbrekende grote delen van silica lagen die de controleprocedure die is beschreven in stap 3.4 van het protocol zou mislukken. Schaal bars = 250 µm (C), 100 µm (D) en 100 µm (E). Klik hier voor een grotere versie van dit cijfer.
