Естественный контроллер близкого цикла
Сенсорно-моторная информация непрерывно течет между мозгом и телом для получения хорошо организованного, скоординированного поведения. Такое поведение можно изучать, сосредоточившись только на действиях человека, как в стиле монолога(рисунок 1A),так и во время сложных динамических действий, разделяемых между двумя агентами в диаде, как в стиле диалога(рисунок 1B). Тем не менее, третий вариант заключается в оценке таких сложных взаимодействий с помощью прокси-контроллера, в контексте человека-компьютера тесного цикла интерфейса(рисунок 1C). Такой интерфейс может отслеживать колебания движения по моментам, вносяые каждым агентом в диаду, и по типу сплоченности, которая возникает из их синхронных взаимодействий, помогая управлять ритмами диада желательными способами.
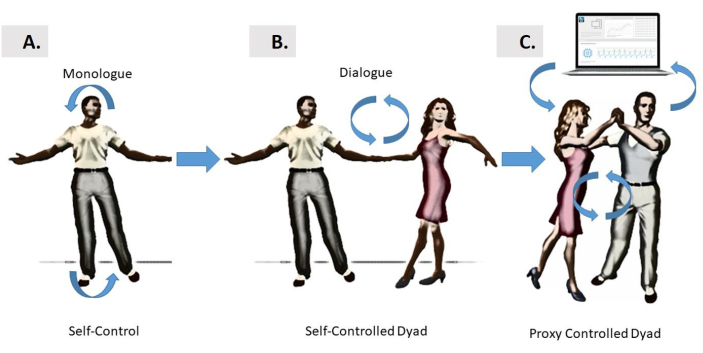
Рисунок 1: Различные формы контроля. (A) Self мозга контролируемых интерфейсов полагаться на тесной петли отношений между мозгом человека и собственного тела человека, который может самостоятельно регулировать и самостоятельно взаимодействовать в “монолог” стиль. Этот режим пытается контролировать самогенерированные движения, или он также может быть направлен на управление внешними устройствами. (B)“Диалог” стиль управления вводится для двух танцоров, которые взаимодействуют друг с другом и через физическое увлечение и поворот, чтобы достичь контроля над движениями друг друга. (C) “Третья сторона” диалог управления dyad вводится как опосредованный компьютерным интерфейсом, который использует в тандеме био-сигналы от обоих танцоров, параметризирует его и подает его обратно к танцорам в повторной параметризированной форме с использованием аудио и / или видение в качестве формы сенсорного руководства. Ремитастикизация в представленных здесь примерах была достигнута с помощью аудио- или визуальной обратной связи, усиленной кинестичным моторным выходом одного из танцоров в режиме реального времени для зрения другого; или обоих танцоров, по очереди в некоторых чередующихся шаблон. Пожалуйста, нажмите здесь, чтобы просмотреть большую версию этой цифры.
Общая цель этого метода состоит в том, чтобы показать, что можно использовать, параметризировать и повторно параметризировать момент за моментом колебания биоритмической деятельности органов в движении, как два агента участвуют в дьядический обмен, который может включать двух людей, или человека и его / ее самостоятельно движущихся аватар.
Исследования о том, как мозг может контролировать действия и предсказывать их сенсорные последствия вызвали много линийтеоретических запросов в последние 1,2,3 и производится различные модели нейромоторногоконтроля 4,5,6,7,8. Одно из этапов исследований в этой многопрофильной области связано с разработкой интерфейсов мозг-машина или мозг-компьютер. Эти типы установок предлагают способы использования и адаптации сигналов ЦНС для управления внешним устройством, таким какроботизированная рука 9,10,11, экзоскелет12, курсор на экране компьютера13 (среди других). Все эти внешние устройства имеют свойство, что они не имеют собственного интеллекта. Вместо этого, мозг пытается контролировать их есть, и часть проблемы, что мозг сталкивается, чтобы узнать, как предсказать последствия движений, которые он генерирует в этих устройствах (например, движения курсора, движения роботизированной руки и т.д.), генерируя другие поддерживающие движения, которые способствуют общей сенсорной обратной связи двигателя в виде кинестетического референтности. Часто, главной целью этих интерфейсов было помочь человеку за что мозг обойти травму или расстройство, чтобы восстановить преобразование его / ее преднамеренные мысли в волей контролируемых физических актов внешнего устройства. Менее распространенным, однако, была разработка интерфейсов, которые пытаются направить движения тел в движении.
Большая часть оригинальных исследований по мозг-машина интерфейсы сосредоточены на контроле центральной нервной системы (ЦНС) над частями тела, которые могут выполнить целенаправленные действия9,14,15,16,17. Есть, однако, другие ситуации, когда использование сигналов, полученных от деятельности периферической нервной системы (PNS), в том числе вегетативной нервной системы (ANS), является достаточно информативным, чтобы влиять и направлять сигналы внешних агентов, в том числе другого человека или аватара, или даже взаимодействующих людей (как на рисунке 1C). В отличие от роботизированной руки или курсора, другой агент в данном случае имеет интеллект, управляемый мозгом (в случае аватара, который был наделен движениями человека, или другого агента, в случае взаимодействующих человеческих dyad).
Установка, которая создает среду совместно адаптивного интерфейса близкого цикла с диадичным обменом, может быть потуха для вмешательства в расстройства нервной системы, в результате которых мозг не может по воле контролировать собственное тело, несмотря на то, что физически не разорвал мост между ЦНС и PNS. Это может быть так из-за шумных периферийных сигналов, в результате которых обратная связь петли, чтобы помочь мозгу непрерывно контролировать и корректировать свои собственные собственные биоритмы, возможно, были нарушены. Этот сценарий возникает у пациентов с болезньюПаркинсона 18,19, или у участников с расстройствами аутистического спектра с избыточным шумом в их двигательной продукции. Действительно, в обоих случаях, мы количественно высокие уровни соотношения шума к сигналу в возвращающихся кинеститических сигналов, полученных отскорости их предполагаемых движений 20,21,22 и от сердца23. В таких случаях, пытаясь освоить мозг-контроль внешних сигналов, а также пытается контролировать тело в движении, может привести к самореактивный сигнал от повторного ва-абитуриента (повторно афферентный) поток информации, что мозг получает от непрерывного (эфферентного) потока двигателя на периферии. Действительно, момент за моментом колебания, присутствующие в таких самостоятельно генерируемых эфферентных потока двигателя содержат важную информацию, полезную, чтобы помочь предсказать сенсорные последствия целенаправленныхдействий 24. Когда эта обратная связь повреждена шумом, становится трудно предсказуемо обновить сигналы управления и преодолеть преднамеренные планы с физическими действиями.
Если мы распространим такую петлю обратной связи на другого агента и будем контролировать взаимодействие человека и агента через третьюсторону (рисунок 1C),у нас может быть возможность управлять выступлениями друг друга в режиме реального времени. Это даст нам доказательство концепции, что мы должны были бы расширить понятие совместно адаптивного мозга тела или мозга-машины интерфейсы для лечения расстройств нервной системы, которые приводят к плохой реализации физической воли от психического намерения.
Целенаправленные действия имеют последствия, которые точно характеризуются моторными стохастичными сигнатурами, которые зависят от контекста и позволяют с высокой уверенностью сделать вывод об уровняхумственных намерений 25,26. Таким образом, преимущество нового метода, который использует диадичный обмен по сравнению с предыдущими человек-ориентированных подходов к мозгу машины или интерфейсов компьютера мозга, является то, что мы можем увеличить контрольные сигналы, чтобы включить телесные и сердечные биоритмы, которые происходят в значительной степени под осознание человека, под различными уровнями намерения. Таким образом, мы ослабляем реактивное вмешательство, которое сознательный контроль, как правило, вызывает в процессе адаптации контроля мозгового курсора17. Мы можем добавить больше уверенности в прогностический процесс, параметризируя различные сигналы, которые мы можем получить доступ. В этом направлении, предыдущая работа существует с использованием мозга и телесных сигналовв тандеме 27,28,29; однако работа, связанная с диадичными взаимодействиями, захваченными сигналами мозга и тела, остается скудной. Кроме того, в существующих литературы до сих пор не разграничить различие между преднамеренными сегментами действия, выполняемого при полной осведомленности и переходных движений, которые спонтанно происходят врезультате преднамеренных из них 30,31. Здесь мы делаем это различие в контексте диадичного обмена, и предлагаем новые способы изучения этойдихотомии 32, предоставляя примеры хореографии (преднамеренные) против импровизированных (спонтанных) движений в танцевальном пространстве.
Из-за задержки трансдукции и передачи в сенсорно-моторнойинтеграции и преобразования процессов 33, необходимо иметь такой прогностический код на месте, чтобы научиться предвидеть предстоящие сенсорные ввода с высокой уверенностью. С этой целью важно уметь охарактеризовать эволюцию соотношения шума к сигналу, получаемого от сигналов в постоянно обновляемом кинестиметичном реафферентного потока. Затем нам нужны протоколы для систематического измерения изменения изменчивости двигателя. Изменчивость по своей сути присутствует в сиюминутных колебаниях исходящего шипущего моторного потока34. Поскольку эти сигналы нестационарены и чувствительны к контекстуальным вариациям35,36, можнопараметризировать изменения, которые происходят с изменением контекста задач. Чтобы свести к минимуму помехи от реактивных сигналов, которые возникают из сознательного контроля ЦНС, и вызвать количественные изменения в шипучих PNS поток двигателя, мы вводим здесь прокси тесного цикла интерфейс, который косвенно изменяет сенсорную обратную связь, путем набора периферийного сигнала, который меняется в значительной степени под самосознанием человека. Затем мы показываем способы систематического измерения изменений, которые вытекает из сенсорных манипуляций, используя стохастический анализ, подлежив визуализировать процесс, который прокси-интерфейс близкого цикла косвенно вызывает в обоих агентах.
Представляем контроллер прокси-тесной петли
Сенсорно-моторная изменчивость, присутствуют в периферийных сигналах, представляют собой богатый источник информации для руководства работой нервной системы во время обучения, адаптации и обобщения в различныхконтекстах 37. Эти сигналы частично появляются как побочный продукт ЦНС, пытаются волей-то контролировать действия, но не являются прямой целью контроллера. По мере того как персона естественно взаимодействует с другими, периферийные сигналы можно использовать, стандартизировать и re-parameterized; это означает, что их вариации могут быть параметризированы и систематически сдвигаются, так как изменяется эфферентный моторный поток, который постоянно вновь входит в систему в качестве кинеститической референтности. В таких условиях мы можем визуализировать стохатические сдвиги, захватывая с высокой точностью богатый сигнал, который в противном случае теряется для типов grand averaging, что более традиционные методы выполняют.
Для достижения характеристики изменений в рамках новой статистической платформы, мы здесь вводим протоколы, стандартизированные типы данных и аналитики, которые позволяют интеграцию внешнего сенсорного ввода (слуховых и визуальных) с внутренне самостоятельно генерируемых двигательных сигналов, в то время как человек, естественно, взаимодействует с другим человеком, или с аватаром версии человека. В этом смысле, поскольку мы стремимся контролировать периферийные сигналы (а не изменять сигналы ЦНС, чтобы непосредственно контролировать внешнее устройство или средства массовой информации), мы придумали этот прокси-интерфейс с близкогоцикла (рисунок 2). Мы стремимся охарактеризовать изменения в стохастичных сигналах PNS, так как они влияют на сигналы ЦНС.
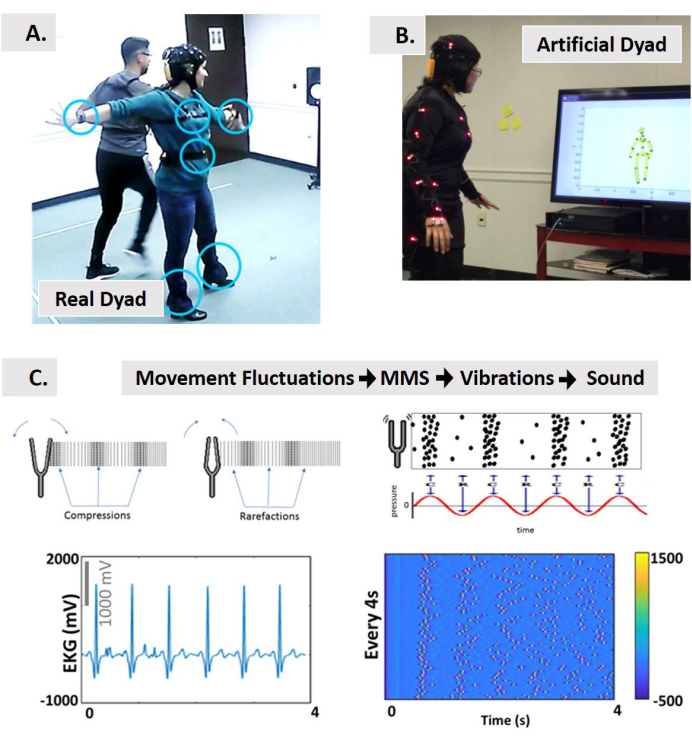
Рисунок 2: Прокси-контроль диадического взаимодействия с использованием тесного цикла мультимодального интерфейса. ( ) Косвенный контроль двух танцоров (танцы сальса) через компьютерный коадативный интерфейс против (B) интерактивный искусственный человек-аватар dyad контролируется с помощью периферийных сигналов нервной системы и повторно параметризации его как звуки и / или как визуальный вход. C)Концепция озвучивания с использованием нового стандартизированного типа данных (микро-движения шипы, MMS), полученных от момент за моментом колебания биоритмических сигналов амплитуды / времени преобразуется в вибрации, а затем звук. Из физики мы заимствуем понятия сжатия и редкости, производимые тюнинговой вилкой, выпроизводяую звуковую волну как измеримые вибрации. Схемы звуковых волн, представленные как давление, модулированные с течением времени параллельно с всплеском концентраций для озвучивания. Пример физического сигнала для прохождения предлагаемого трубопровода от MMS к вибрациям и солениям. Мы используем сигнал сердечного ритма в качестве ввода в интерфейс. Это принимает колебания амплитуды сигнала выровнены к движению начала каждые 4 секунды движения и строит MMS поезда, представляющие вибрации. Поезда-шипы от MMS стандартизированы от 0,1 евро. Цвет шипов в соответствии с цветовой полосой, представляет интенсивность сигнала. Затем мы соознаем эти вибрации с помощью Макса. Этот соифицированный сигнал может быть использован для воспроизведения в A или для изменения взаимодействия b с аватаром. Кроме того, в B можно вставлять звук в окружающую среду и использовать положение тела, чтобы играть звук обратно в области интереса (RoI), или модулировать аудио функции в качестве функции расстояния до RoI, скорость или ускорение части тела на якоре к другой части тела, при прохождении мимо RoI. Пожалуйста, нажмите здесь, чтобы просмотреть большую версию этой цифры.
Сигналы PNS могут быть использованы неинвазивно с носимых технологий зондирования, которые совместно регистрировать мульти-модальных эфферентных потоков из различных функциональных слоев нервной системы, начиная от вегетативнойдо добровольной 32. Затем мы можем измерить в режиме реального времени изменения в таких потоках и выбрать те, чьи изменения усиливают соотношение сигнала к шуму. Этот эфферентный моторный сигнал может быть дополнен другими формами сенсорного наведения (например, слуховым, визуальным и т.д.) Потому что PNS сигналы пейзаж полной осведомленности, они легче манипулировать без особого сопротивления 38. Таким образом, мы используем их, чтобы помочь направить производительность человека таким образом, что может быть менее напряженным для человеческой системы.
Создание интерфейса
Представляем дизайн прокси-контроля при посредничестве тесного цикла совместно адаптивного мультимодального интерфейса. Этот интерфейс управляет мультисенсорной обратной связью в режиме реального времени. На рисунке 3 отображается общий дизайн.
Интерфейс близкого цикла характеризуется 5 основными шагами. Первым шагом является мультимодальный сбор данных с нескольких носимых инструментов. Второй шаг – это синхронизация мультимодальных потоков через платформу LabStreamingLayer (LSL, https://github.com/sccn/labstreaminglayer), разработанную группой MoBI 39. Третьим шагом является потоковая передача структуры данных LSL в Python, MATLAB или другой интерфейс языка программирования для интеграции сигналов и эмпирически параметризации физиологических функций (соответствующих нашей экспериментальной установке) в режиме реального времени. 4-й шаг заключается в повторной параметризации выбранных функций, извлеченных из непрерывного потока изучаемого телесного сигнала, и дополнить его с помощью сенсорной модальности выбора (например, визуальной, слуховой, кинеститической и т.д.), чтобы отыграть его обратно в виде звуков или визуальных эффектов, увеличить, заменить или улучшить сенсорный механизм, который является проблематичным в нервной системе человека. Наконец, 5-й шаг заключается в повторной оценке стохастических подписей сигналов, генерируемых системой в режиме реального времени, чтобы выбрать, какой сенсорный способ приводит стохастические сдвиги телесных колебаний к режиму высокой определенности (минимизация шума) в прогнозировании сенсорных последствий предстоящего действия. Этот цикл играет непрерывно в течение всего эксперимента с акцентом на выбранный сигнал, сохраняя при этом полную производительность для последующего анализа (как по изображено в схемах рисунок 3 и см. 40,41,42,43,44,45,46,47 для примера заднего анализов).
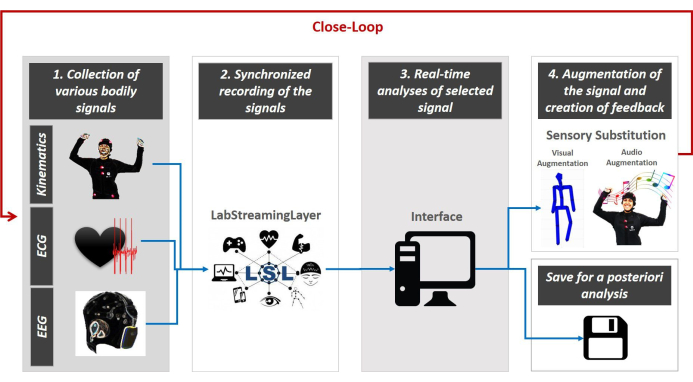
Рисунок 3: Архитектура мультимодальной периферийной концепции интерфейса с замком. Собираются различные телесные сигналы – кинематические данные, активность сердца и мозга (шаг 1). LSL используется для синхронной регистрации и передачи данных, поступающих из различных аппаратов в интерфейс (шаг 2). Код Python/MATLAB/C используется для непрерывной параметризации колебаний сигналов с использованием стандартизированного типа данных и общей шкалы, что позволяет наиболее адекватно выбирать источник сенсорного наведения для омрачения неопределенности системы (шаг 3). Это в режиме реального времени повышение передачи сигнала через выбранный канал (ы), то позволяет повторно параметризации повторного ввода сенсорного сигнала для интеграции в непрерывный поток двигателя и повышения потерянных или поврежденных входной поток (сенсорная замена шаг 4). Непрерывная перео том, что завершает цикл (шаг 5), и мы охвясым все данные для дополнительного анализа в будущем. Пожалуйста, нажмите здесь, чтобы просмотреть большую версию этой цифры.
В следующих разделах представлен общий протокол о том, как построить интерфейс с замкнутым циклом (как описано на рисунке 3) и описывают репрезентативныерезультаты двух экспериментальных интерфейсов (подробно представленных в дополнительном материале), включающих физическое дьядное взаимодействие между двумя танцорами (реальная система тесного цикла) и виртуальное дьядическое взаимодействие между человеком и аватаром (искусственная система тесного цикла).
