El controlador de bucle cerrado natural
La información sensorial-motora fluye continuamente entre el cerebro y el cuerpo para producir comportamientos bien organizados y coordinados. Tales comportamientos se pueden estudiar mientras se centran únicamente en las acciones de la persona, como en un estilo de monólogo(Figura 1A),o durante complejas acciones dinámicas compartidas entre dos agentes en un dyad, como en un estilo de diálogo(Figura 1B). Sin embargo, una tercera opción es evaluar interacciones tan complejas a través de un controlador proxy, en el contexto de una interfaz de bucle cerrado humano-ordenador (Figura 1C). Tal interfaz puede rastrear las fluctuaciones de los movimientos momento a momento aportadas por cada agente en el dyad, y por el tipo de cohesividad que se autoexamina de sus interacciones sincrónicas, ayudando a dirigir los ritmos del dyad de maneras deseables.
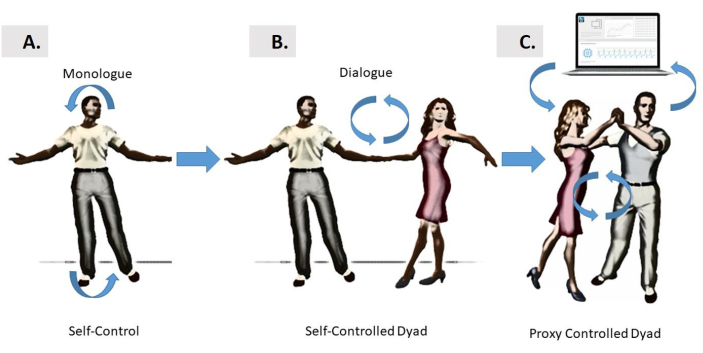
Figura 1: Diferentes formas de control. (A) Las interfaces autocontroladas por cerebro se basan en las relaciones de bucle estrecho entre el cerebro de la persona y el propio cuerpo de la persona, que pueden autorregularse e auto-interactuar en estilo “monólogo”. Este modo intenta el control de los movimientos autogenerados, o también puede tener como objetivo controlar dispositivos externos. B) Se introduce el control de estilo “Diálogo” para dos bailarines que interactúan entre sí y a través del entrenamiento físico y la toma de turnos para alcanzar el control sobre los movimientos del otro. (C) El control de diálogo “tercero” de la diría se introduce como mediado por una interfaz informática que aprovecha en tándem las bio-señales de ambos bailarines, lo parametriza y lo alimenta de nuevo a los bailarines en forma re-parametrizada utilizando audio y/o visión como formas de orientación sensorial. La re-parametrización en los ejemplos aquí presentados se logró utilizando retroalimentación visual o de audio, mejorada por la salida del motor cinético en tiempo real de uno de los bailarines para influir en el otro; o de ambos bailarines, turnándose en algún patrón alterno. Haga clic aquí para ver una versión más grande de esta figura.
El objetivo general de este método es mostrar que es posible aprovechar, parametrizar y re-parametrizar las fluctuaciones momento por momento en las actividades biorritálmicas de los cuerpos en movimiento, ya que dos agentes participan en el intercambio dyadic que puede involucrar a dos seres humanos, o un humano y su avatar auto-en movimiento.
Las investigaciones sobre cómo el cerebro puede controlar las acciones y predecir sus consecuencias sensoriales han generado muchas líneas de investigaciones teóricas en los últimos1,2,3 y producido varios modelos de control neuromotor4,5,6,7,8. Una línea de investigación en este campo multidisciplinario ha implicado el desarrollo de la máquina del cerebro de bucle cercano o interfaces cerebro-computadora. Este tipo de configuraciones ofrecen formas de aprovechar y adaptar las señales CNS para controlar un dispositivo externo, como un brazo robótico9,10,11,un exoesqueleto12,un cursor en una pantalla de ordenador13 (entre otros). Todos estos dispositivos externos comparten la propiedad de que no tienen inteligencia propia. En cambio, el cerebro que intenta controlarlos tiene, y parte del problema que enfrenta el cerebro es aprender a predecir las consecuencias de los movimientos que genera en estos dispositivos (por ejemplo, los movimientos del cursor, los movimientos del brazo robótico, etc.) mientras genera otros movimientos de apoyo que contribuyen a la retroalimentación motora sensorial general en forma de reaferencia cinética. A menudo, el objetivo general de estas interfaces ha sido ayudar a la persona detrás de ese cerebro a evitar una lesión o trastorno, para recuperar la transformación de sus pensamientos intencionales en actos físicos volicionalmente controlados del dispositivo externo. Sin embargo, menos común ha sido el desarrollo de interfaces que intentan dirigir los movimientos de los cuerpos en movimiento.
Gran parte de la investigación original sobre las interfaces cerebro-máquina se centra en el control del sistema nervioso central (SNC) sobre partes del cuerpo que pueden lograr acciones dirigidas por objetivos9,14,15,16,17. Hay, sin embargo, otras situaciones por las que el uso de las señales derivadas de las actividades de los sistemas nerviosos periféricos (PNS), incluidos los de los sistemas nerviosos autónomos (ANS), es lo suficientemente informativo como para influir y dirigir las señales de los agentes externos, incluyendo a otro humano o avatar, o incluso la interacción de los seres humanos (como en la Figura 1C). A diferencia de un brazo robótico o cursor, el otro agente en este caso, tiene inteligencia impulsada por un cerebro (en el caso del avatar que ha sido dotado con los movimientos de la persona, o de otro agente, en el caso de un diálogo humano interactuando).
Una configuración que crea un entorno de una interfaz de bucle cerrado coa adaptativo con intercambio dyadic puede ser útil para intervenir en trastornos de los sistemas nerviosos por los cuales el cerebro no puede controlar volicionalmente su propio cuerpo en movimiento a voluntad, a pesar de no haber cortado físicamente el puente entre el SNC y el PNS. Este puede ser el caso debido a señales periféricas ruidosas por las cuales los bucles de retroalimentación para ayudar al cerebro monitorear continuamente y ajustar sus propios biorritmos autogenerados pueden haber sido interrumpidos. Este escenario surge en pacientes con enfermedad de Parkinson18,19,o en participantes con trastornos del espectro autista con exceso de ruido en su producción motora. De hecho, en ambos casos, hemos cuantificado altos niveles de relación ruido-señal en las señales cinéticas que regresan derivadas de la velocidad de sus movimientos previstos20,21,22 y del corazón23. En tales casos, tratar de dominar el control cerebral de las señales externas, mientras que también tratando de controlar el cuerpo en movimiento, puede resultar en una señal auto reactiva de la corriente de información re-participante (reaferente) que el cerebro recibe de la corriente motora continua (efervescencia) en la periferia. De hecho, las fluctuaciones momento a momento presentes en dicha corriente motora efervestiva autogenerada contienen información importante útil para ayudar a la predicción de las consecuencias sensoriales de las acciones intencionales24. Cuando esta retroalimentación se corrompe por el ruido, se hace difícil actualizar previsiblemente las señales de control y puentear los planes intencionales con actos físicos.
Si extendiéramos dicho bucle de retroalimentación a otro agente y controlemos las interacciones de la persona y el agente a través de un tercero(Figura 1C),es posible que tengamos la oportunidad de dirigir las actuaciones del otro casi en tiempo real. Esto nos proporcionaría la prueba de concepto de que tendríamos que extender la noción de interfaces coa adaptativas cerebro-cuerpo o cerebro-máquina para tratar trastornos de los sistemas nerviosos que resultan en una mala realización de la voluntad física de la intención mental.
Las acciones con propósito tienen consecuencias, que se caracterizan precisamente por firmas estocásticas motoras que dependen del contexto y permiten la inferencia de niveles de intención mental con alta certeza25,26. Por lo tanto, una ventaja de un nuevo método que aprovecha el intercambio dyadic sobre enfoques previos centrados en la persona a la máquina del cerebro o interfaces de computadora cerebral, es que podemos aumentar las señales de control para incluir los biorritmos corporales y cardíacos que transpiran en gran parte por debajo de la conciencia de la persona, bajo diferentes niveles de intención. De esta manera, amortiguamos la interferencia reactiva que el control consciente tiende a evocar en el proceso de adaptación del control cerebro-cursor17. Podemos añadir más certeza al proceso predictivo parametrizando las diversas señales a las que podemos acceder. En esa línea, existe un trabajo previo utilizando señales cerebrales y corporales en tándem27,28,29; pero el trabajo que involucra interacciones dyadic capturadas por señales cuerpo-cuerpo sigue siendo escaso. Además, la literatura extant aún no ha delineado la distinción entre segmentos deliberados de la acción realizada bajo plena conciencia y movimientos transitorios que se producen espontáneamente como consecuencia de los deliberados30,31. Aquí hacemos esa distinción en el contexto del intercambio dyadic, y ofrecemos nuevas formas de estudiar esta dicotomía32,al tiempo que proporcionamos ejemplos de movimientos coreografiados (deliberados) frente a movimientos improvisados (espontáneos) en el espacio de la danza.
Debido a los retrasos en la transducción y transmisión en los procesos de integración y transformación sensorial-motor33,es necesario tener tal código predictivo en su lugar, para aprender a anticipar la próxima entrada sensorial con alta certeza. Con ese fin, es importante poder caracterizar la evolución de la relación ruido-señal derivada de las señales en la corriente de reaferencia cinética que se actualiza continuamente. A continuación, necesitamos protocolos para medir sistemáticamente el cambio en la variabilidad del motor. La variabilidad está inherentemente presente en las fluctuaciones momento a momento de la corriente de motor efervescencia saliente34. Dado que estas señales no son estacionarias y sensibles a las variaciones contextuales35,36,es posible parametrizar los cambios que se producen con alteraciones del contexto de las tareas. Para minimizar la interferencia de las señales reactivas que surgen del control consciente del SNC, y para evocar cambios cuantificables en la efervescencia del motor PNS, presentamos aquí una interfaz proxy de bucle cercano que altera indirectamente la retroalimentación sensorial, mediante el reclutamiento de la señal periférica que está cambiando en gran medida por debajo de la autoconciencia de la persona. A continuación, mostramos maneras de medir sistemáticamente el cambio que se produce en las manipulaciones sensoriales, utilizando análisis estocásticos que se pueden visualizar para visualizar el proceso que la interfaz de bucle cercano proxy evoca indirectamente en ambos agentes.
Presentación de un controlador de bucle cerrado proxy
La variabilidad sensorial-motora presente en las señales periféricas constituye una rica fuente de información para guiar el rendimiento de los sistemas nerviosos mientras que el aprendizaje, la adaptación y la generalización tienen lugar en diferentes contextos37. Estas señales surgen en parte como un subproducto del CNS tratando de controlar volicionalmente las acciones, pero no son el objetivo directo del controlador. A medida que la persona interactúa naturalmente con los demás, las señales periféricas se pueden aprovechar, estandarizar y volver a parametrizar; lo que significa que sus variaciones se pueden parametrizar y cambiar sistemáticamente, ya que se altera la corriente motora efervesica que vuelve a entrar continuamente en el sistema como reaferencia cinética. En tales entornos, podemos visualizar los cambios estocásticos, capturando con alta precisión una señal rica que de otra manera se pierde a los tipos de gran promedio que realizan las técnicas más tradicionales.
Para lograr la caracterización del cambio bajo la nueva plataforma estadística, aquí introducimos protocolos, tipos de datos estandarizados y análisis que permiten la integración de entrada sensorial externa (auditiva y visual) con señales motoras generadas internamente, mientras que la persona interactúa naturalmente con otra persona, o con una versión avatar de la persona. En este sentido, debido a que nuestro objetivo es controlar las señales periféricas (en lugar de modificar las señales CNS para controlar directamente el dispositivo externo o los medios), acuñamos esto como una interfaz de bucle cercano proxy (Figura 2). Nuestro objetivo es caracterizar los cambios en las señales estocásticas del PNS, ya que afectan a los del SNC.
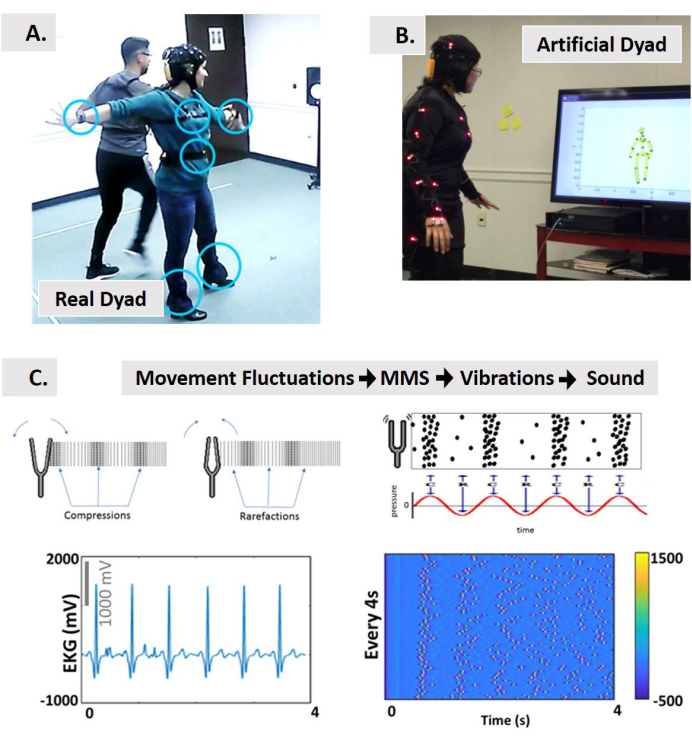
Figura 2: Control proxy de una interacción dyadic utilizando interfaz multimodólica de bucle cerrado. (A) Control indirecto de dos bailarines (salsa danzante) a través de una interfaz coa adaptativa de computadora frente a (B) un dyad artificial interactivo persona-avatar controlado mediante el aprovechamiento de las señales de los sistemas nerviosos periféricos y volver a parametrizarlo como sonidos y / o como entrada visual. (C) El concepto de sonificación utilizando un nuevo tipo de datos estandarizados (los picos de micro-movimiento, MMS) derivado de las fluctuaciones momento a momento en la amplitud/sincronización de las señales biorritómicas convertidas en vibraciones y luego al sonido. De Physics, tomamos prestadas las nociones de compresiones y rarefacciones producidas por una horquilla de ajuste que produce onda sonora como vibraciones medibles. Esquemas de ondas sonoras representadas como presión modulada con el tiempo en paralelo a las concentraciones de pico para la sonificación. Ejemplo de una señal física para someterse a la tubería propuesta desde MMS hasta vibraciones y sonificación. Utilizamos la señal de frecuencia cardíaca como entrada a la interfaz. Esto toma fluctuaciones en la amplitud de la señal alineadas con el inicio de movimiento cada 4 segundos de movimiento y construye trenes MMS que representan las vibraciones. Los trenes spike del MMS están estandarizados a partir de [0,1]. El color de los picos según la barra de color representa la intensidad de la señal. Luego sonificamos estas vibraciones usando Max. Esta señal sonificada se puede utilizar para reproducir en A, o para alterar en B las interacciones con el avatar. Además, en B es posible incrustar el sonido en el entorno y utilizar la posición del cuerpo para reproducir el sonido en una región de interés (RoI), o para modular las características de audio como una función de distancia a la RoI, velocidad o aceleración de una parte del cuerpo anclada a otra parte del cuerpo, al pasar por el RoI. Haga clic aquí para ver una versión más grande de esta figura.
Las señales PNS se pueden aprovechar de forma no invasiva con tecnologías de detección ponibles que co-registran flujos efervesivos multimodales de diferentes capas funcionales de los sistemas nerviosos, que van desde las autonómicas hasta lasvoluntarias 32. A continuación, podemos medir casi en tiempo real los cambios en tales flujos y seleccionar aquellos cuyos cambios mejoran la relación señal-ruido. Esta señal motora efervestiva se puede aumentar con otras formas de orientación sensorial (por ejemplo, auditiva, visual, etc.) Debido a que las señales PNS chivo expiatorio plena conciencia, son más fáciles de manipular sin mucha resistencia 38. Como tal, los usamos para ayudar a dirigir el rendimiento de la persona de maneras que pueden ser menos estresantes para el sistema humano.
Construcción de la interfaz
Presentamos el diseño del control proxy mediado por una interfaz multimodal co-adaptativa de bucle cerrado. Esta interfaz dirige los comentarios multisensoriales en tiempo real. La Figura 3 muestra el diseño general.
La interfaz de bucle cercano se caracteriza por 5 pasos principales. El primer paso es la recopilación de datos multimodal de múltiples instrumentos portátiles. El segundo paso es la sincronización de las secuencias multimodales a través de la plataforma de LabStreamingLayer (LSL, https://github.com/sccn/labstreaminglayer) desarrollada por el grupo MoBI 39. El tercer paso es la transmisión de la estructura de datos LSL a una interfaz de Python, MATLAB u otro lenguaje de programación para integrar las señales y parametrizar empíricamente las características fisiológicas (relevantes para nuestra configuración experimental) en tiempo real. El 4º paso es re-parametrizar las características seleccionadas extraídas de la corriente continua de la señal corporal estudiada y aumentarla utilizando una modalidad sensorial de elección (por ejemplo, visual, auditiva, cinética, etc.) para reproducirla en forma de sonidos o visuales, para aumentar, sustituir o mejorar la modalidad sensorial que es problemática en el sistema nervioso de la persona. Por último, el 5º paso es reevaluar las firmas estocásticas de las señales generadas por el sistema en tiempo real, para seleccionar qué modalidad sensorial lleva los cambios estocásticos de las fluctuaciones corporales a un régimen de alta certeza (minimización del ruido) en la predicción de las consecuencias sensoriales de la acción inminente. Este bucle se reproduce continuamente a lo largo de la duración del experimento con el foco en la señal seleccionada, mientras almacena el rendimiento completo para análisis posteriores (como se muestra en los esquemas de la Figura 3 y ver40,41,42,43,44,45,46,47 para un ejemplo de análisis a posteriori).
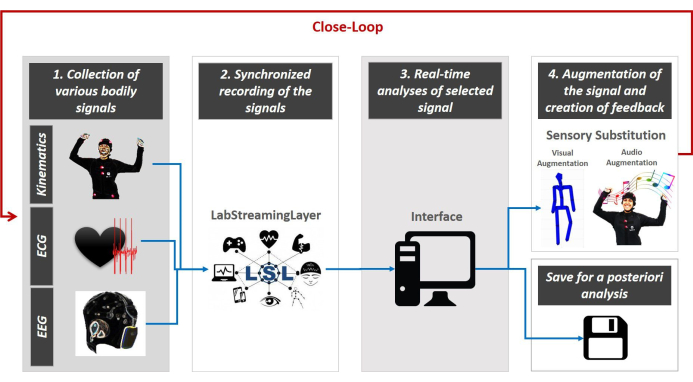
Figura 3: La arquitectura del concepto de interfaz de bucle estrecho de varios modales impulsados por periféricos. Se recopilan varias señales corporales -datos cinemáticos, actividad cardíaca y cerebral (paso 1). LSL se utiliza para co-registrar y transmitir sincrónicamente los datos procedentes de varios equipos a la interfaz (paso 2). El código Python/MATLAB/C# se utiliza para parametrizar continuamente las fluctuaciones en las señales utilizando un tipo de datos estandarizado y una escala común que permite seleccionar la fuente de orientación sensorial más adecuada para amortiguar la incertidumbre del sistema (paso 3). Esta mejora en tiempo real de la transmisión de señal a través de los canales seleccionados permite entonces la re-parametrización de la señal sensorial re-participante para integrarse en la corriente continua del motor y mejorar la secuencia de entrada perdida o dañada (paso de sustitución sensorial 4). La reevaluación continua cierra el bucle (paso 5) y guardamos todos los datos para análisis futuros adicionales. Haga clic aquí para ver una versión más grande de esta figura.
En las secciones siguientes se presenta el protocolo genérico de cómo construir una interfaz de bucle cerrado (como se describe en la Figura 3)y describir los resultados representativos de dos interfaces experimentales (elaboradamente presentadas en Material Suplementario) que implican interacción dyadica física entre dos bailarines (sistema de bucle estrecho real) y la interacción dyadica virtual entre una persona y un avatar (sistema de bucle cerrado artificial).
