1. Growing Cells on Acoustically-Transparent Polyester Film
- Drill a 12 mm hole size at the bottom of a standard 35 mm culture dish using a vertical press-drill. Move the drill slowly and wear eye protection. Remove pieces of plastic attached to the bottom of the dish using a blade to create a smooth surface on the external side (Figure 2).
- Apply a thin layer of marine-grade epoxy or glue at the external bottom surface of the dish.
- Place a film of polyester (2.5 µm thickness) against the external bottom surface of the dish and press firmly to make sure the epoxy/glue spreads evenly between the film and the thick plastic surface. Gently pull the film in a centrifugal manner with fingers to create a flat surface (Figure 2).
- When the epoxy/glue has dried, briefly rinse-dry the polyester-bottom dish with 95% ethanol and sterilize by placing the dish and the inside surface of its lid under a strong 254 nm UV excitation source. Adjust duration and intensity to deliver a UV dose of approximately 330 mJ cm-2 for complete destruction of most types of micro-organisms. This energy approximately corresponds to a duration of 5 min using a 1,000 µW cm-2 UV illumination.
- Aliquot commercially available extracellular matrix protein mixtures (EMPM) in small tubes (50-100 µL) and store them at -20 °C or less in sterile conditions.
- In a sterile environment (e.g., inside a biosafety cabinet), dilute a frozen stock of EMPM with a desired culture medium to 1:100. Work on ice to prevent EMPM polymerization at room temperature. Quickly apply 100 µL of the medium mixture onto the polyester film. Place the lid back on the dish to maintain sterility.
- Incubate EMPM-coated polyester bottom dishes in a cell culture CO2 incubator at 37 °C for 6-12 h.
- After incubation, aspirate the excess medium and directly seed the surface with cells at the desired density. Work under sterile condition to maintain sterility.
2. LIPUS Implementation
- Place a water tank underneath the objective of an upright microscope with large working volume and without illumination hardware in the transmission path.
- Using commercially-available optomechanical components, place a sample holder below the objective and a transducer holder underneath the sample holder. For subsequent sample search and ultrasound alignment, mount these two holders on translation stages.
- Place the moving parts and actuators of translation stages either outside the tank or above the water line to avoid water damage. Only use non-corrosive materials such as anodized aluminum or stainless steel for immersed optomechanical components.
- Fill the tank with deionized and degassed water before utilizing the immersion transducer. The water line should coincide with the horizontal plane of the sample holder (Figure 3).
NOTE: Deionized water prevents electrical coupling in presence of high electric fields. Degassing will also prevent scattering and alterations of acoustic waves. Drain water after each experiment using a pump or valve so that the water line falls below the position of the transducer. Also, replace or filter water frequently and clean-up the water tank as needed to avoid growth of microorganisms.
3. Oblique Acoustic Excitation
- Using commercially available optomechanical components, orient the transducer in an oblique position with respect to the optical path. This will ensure that any reflected waves will be directed away from the sample (Figure 3 and Figure 4).
4. Driving the Transducer
NOTE: Ultrasound transducers convert oscillating electrical energy into mechanical expansion/contraction of a piezoelectric material. This conversion produces energy loss in the form of heat energy. Hence, while transducers do possess a peak input voltage limit, they also possess an electrical power limit to avoid thermal damage to the piezoelectric element:

with the duty cycle the relative fraction of time of electrical simulation, P the electrical power (in Watts), Vrms the input root-mean-square voltage (in Volts) of the alternative voltage source and Z the electrical impedance (in Ohms).
with Vpp the peak-to-peak input voltage applied to the transducer.
- Create a sinusoidal wave form containing the desired frequency, number of cycles per pulse, and pulse repetition frequency using a commercial function generator. However, the relatively high Vpp needed to effectively drive standard ultrasound transducers often requires the addition of a power amplifier to amplify the output (i.e., increase the amplitude of Vpp) of the function generator.
NOTE: For example, a transducer’s manufacturer indicates the power limit for a given transducer is 35 W. Will a sinusoidal peak-to-peak input voltage (Vdi) of 500 mV at a duty cycle of 50% and amplified through a 50 dB/100 W amplifier be within the power limit of this transducer?- To answer this question, calculate the voltage after amplification. For a radio-frequency (RF) power amplifier, the amplification factor (dB) is defined by:

Thus, the amplified voltage has an amplitude output Vpp (Vpp = Vout) of:
Using Equations 1 and 2, and using 50 Ω as electrical impedance, the corresponding power generated by this voltage is:

This stimulation is therefore within the power limit of the transducer. - Using the example above, calculate the waveform parameters (Vpp, frequency, pulse duration and pulse repetition frequency) that correspond to the power and voltage limits provided by the transducer’s manufacturer. Make sure to respect these limits to avoid damaging the transducer and other connected instruments.
- To answer this question, calculate the voltage after amplification. For a radio-frequency (RF) power amplifier, the amplification factor (dB) is defined by:
- Choose a function generator that operates within a frequency range compatible with the ultrasound transducer. Adjust the frequency of the function generator to the nominal peak frequency of the transducer.
- Create a sinusoidal voltage pulse of the desired duration and repetition frequency using the burst mode of the function generator. Adjust peak-to-peak voltage to a desired value. Make sure that the pulse duration is shorter than the elapsed time between two consecutive pulses.
- Check that the waveform corresponds to the desired signal by connecting the output of the function generator to the input of an oscilloscope.
- Connect the output of the function generator to the input of a power RF amplifier (Figure 4). Make sure that the stimulation parameters are within the limits of the transducer’s manufacturer.
5. Beam Alignment
- Choose a hydrophone that operates with a frequency range and acoustic intensity compatible with the frequency and intensity of the ultrasound transducer.
- Carefully bring the tip of a hydrophone probe into focus within the objective field of view at the position corresponding to the position of the sample (Figure 4).
- Make sure that both probe and transducer are immersed in deionized and degassed water. Do not bump the tip of the hydrophone with any physical object other than water as this will alter its coating and affect the measurement.
- Perform a gross pre-alignment of the transducer by visually positioning its acoustic axis toward the hydrophone probe. Makes sure that the distance between the transducer’s surface and the hydrophone tip correspond approximately to the transducer’s focal length.
- Connect the hydrophone output to one of the oscilloscope’s signal input. Connect the synchronization trigger from the function generator to another oscilloscope input. Visualize both signals simultaneously on the oscilloscope.
- Drive the transducer with few ultrasound cycles at a low duty cycle and low amplitude to avoid damaging the probe. Check with the hydrophone’s manufacturer safe operation conditions to avoid damaging the hydrophone tip.
- Adjust the s/division knob according to the travel time of ultrasound from the transducer’s surface to the hydrophone. Look for a hydrophone signal on the oscilloscope after the synchronization trigger.
- Slowly actuate the transducer using a motorized or manual XYZ stage. Leave the transducer into the position that correlates with the maximal hydrophone signal (Figure 4).
NOTE: If no signal is detected it is possible that the intensity of the acoustic pulses is too low or that the beam is mis-aligned or scattered by an object. Check regularly that the hydrophone and transducer are visually pre-aligned and that no bubbles or physical object are present in the path except the polyester film. If no signal is still detected, increase the input voltage by a small amount to increase the amplitude of hydrophone signal.
6. Determination of Ultrasound Pulse Pressure and Intensity
- With the beam aligned, measure the peak-to-peak amplitude of the hydrophone output at the oscilloscope for various voltages driving the transducer. Make sure not to exceed the pressure limit recommended by the hydrophone’s manufacturer.
- Convert these measurements into pressure and/or acoustic intensity values using the calibration method provided by the hydrophone’s manufacturer.
NOTE: The acoustic intensity can be determined from the pressure and vice versa using the formula:
with I the acoustic pressure (in W m-2), P the acoustic pressure (in Pa), ρ the density of propagating material (1,000 kg m-3 for water) and c the speed of sound in propagating medium (for water, c = 1,500 m s-1). - Create calibration curves using these measurements.
NOTE: The pressure vs. voltage and intensity vs. voltage curves have a linear and parabolic shape, respectively. - Determine the pressure and/or intensity value of a desired driving voltage by using the corresponding calibration curve.
7. Calcium-Sensitive/LIPUS Live-Cell Fluorescence Imaging
- Replace the cell’s culture medium with a desired imaging buffer containing 5 µM of a cell-permeant calcium-sensitive dye (e.g., Fluo-4 AM). Incubate the culture dish in a CO2 incubator at 37 °C for 1 h.
- Carefully wash cells with the same buffer free of dye.
- Place the dish in the sample holder. Excite the cells using blue light illumination (490 nm) and adjust excitation intensity and camera exposure to avoid excessive bleaching or pixel saturation.
- Perform time-lapse imaging using desired image acquisition settings. Use an immersion objective for better image quality and with long working distance to reduce undesired reflections (see Figure 4).
Figure 5 is an example of LIPUS experiment multiplexed with calcium imaging. Glioblastoma cells (A-172) were grown on EMPM coated polyester film in standard culture medium (supplemented with 10% serum and 1% antibiotics) and incubated with the calcium-sensitive fluorescent reporter Fluo-4 AM. Cells were imaged using a 10X immersion lens and illuminated with a white LED light source and fluorescence light was collected using a standard GFP filter set. LIPUS was applied by manually by driving a 4 MHz transducer with a pulse waveform of 158 V peak-to-peak amplitude, 0.1 ms pulse duration and 10 ms pulse repetition frequency (i.e., 1% duty cycle). These parameters correspond to Isppa = 88 W cm-2 (well below the diagnostic limit of 190 W cm-2)and Ispta = 877 mW cm-2 (slightly above the diagnostic limit of 720 mW cm-2), respectively. The results show this stimulation produced robust calcium elevations (Figure 5B, 5C, 5D).
For short pulse durations (i.e., with no significant heat dissipation during the pulse) and assuming the heat capacity of the sample (i.e., cells grown on polyester film and immersed in aqueous solution) is similar to that of water, the change of temperature (∆Tmax) produced during each pulse can be estimated by16


with a pulse duration of 0.1 ms and pulse intensity of 88 W cm-2
∆Tmax = 0.12 x 0.0001 x 88 ≈ 1 m°C
with 1% duty cycle, the small amount of heat deposited at the focal zone during each 0.1 ms pulse is likely removed by thermal conduction during the 9.9 ms spanned between two consecutive pulses. Hence, the robust calcium signals seen in Figure 5B, 5C, 5D are most likely induced by non-thermal mechanism(s).
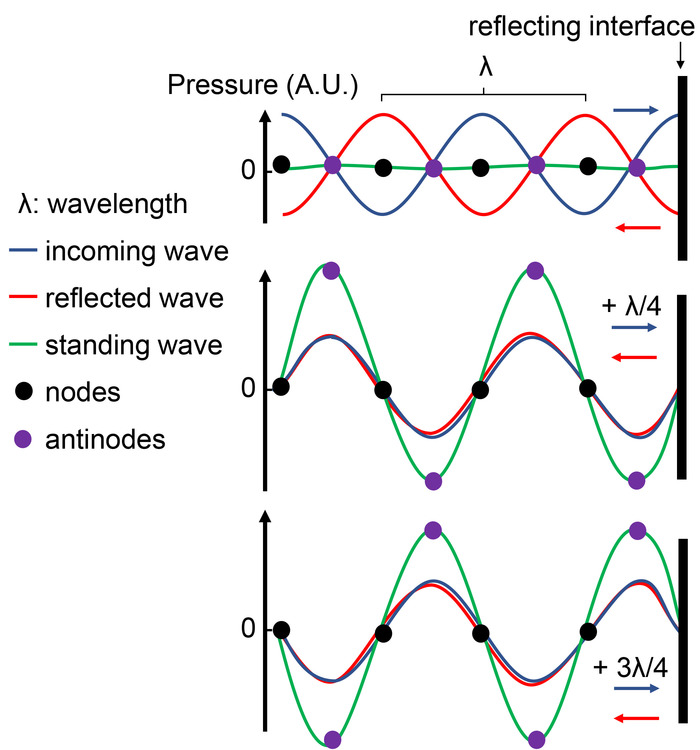
Figure 1: Standing wave formation at a reflecting interface. The presence of an interface between materials with different acoustic impedance reflects an incoming pressure wave (blue) with a wavelength λ. Since both waves travel in opposite directions, an oscillating phase shift is established. Top: at this time, the phase shift is 180°, producing destructive interference of the standing wave (green wave). Middle: After the waves have moved a distance corresponding to λ/4 with respect to the top panel, the phase shift is null and both waves amplify via constructive interferences, producing a standing wave of higher amplitude. Bottom: After the waves have moved an additional distance of λ/2 (hence a total of λ/4+λ/2 = 3/4 λ from the top reference), the phase shift becomes null again, producing a standing wave of high amplitude but with inverse polarity. Note that some positions within the path have a constant null pressure (node, black circles) while other positions constantly oscillate between minimum and maximum pressures (antinodes, green circles). Please click here to view a larger version of this figure.
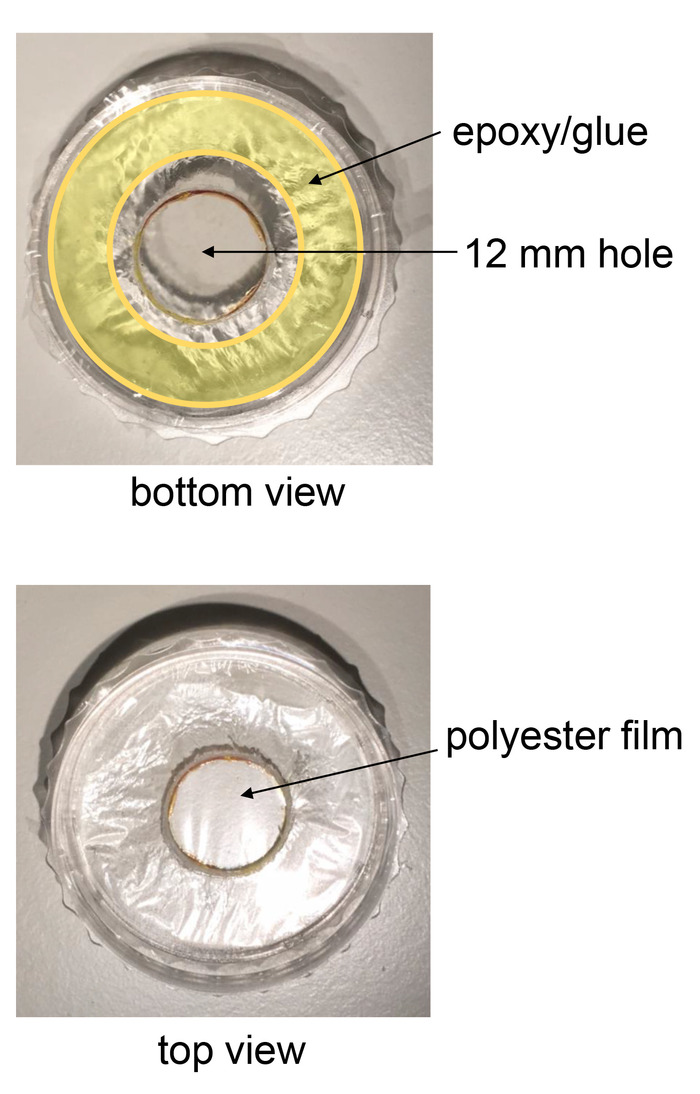
Figure 2: Growing cells on acoustically-transparent polyester film. The figure shows the bottom part of a 35 mm dish with a large 12 mm hole in its center. The hole is subsequently covered with a thin polyester film. The film is firmly glued to the external bottom of the dish using marine grade epoxy. Please click here to view a larger version of this figure.
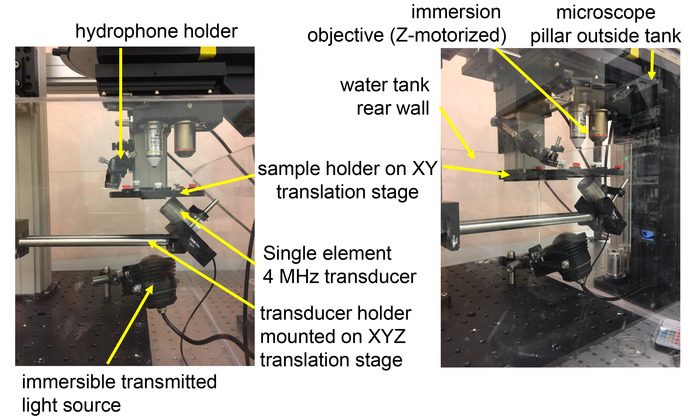
Figure 3: Implementation of an ultrasound set-up to an upright fluorescence microscope. A custom-made water tank is placed under an upright fluorescence microscope without transmitted illumination hardware. A motorized sample holder positioned under the objective is attached to optomechanical components fixed to the vibration table outside the tank. The transducer is positioned underneath the sample and attached to a translation stage affixed to optomechanical components inside the tank. Please click here to view a larger version of this figure.
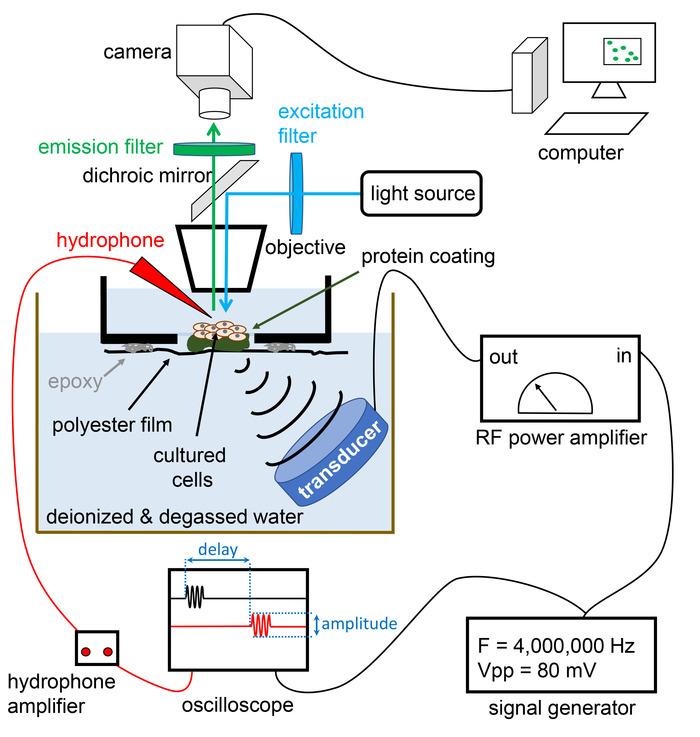
Figure 4: Schematic diagram of the entire set-up. The set-up includes an epi-fluorescence upright fluorescence microscope to enable fluorescence imaging of cultured cells. The transducer is shown with an oblique orientation with respect to the optical path. This configuration avoids backward reflection of acoustic waves along the acoustic path, thus preventing standing wave formation and/or repetitive stimulation of the sample with multiple ultrasound echoes. A desired waveform is produced by a function generator which can be manually switched on or electronically triggered by a computer interface (Transistor-Transistor-Logic or Universal Serial Bus). The amplitude and delay of the signal measured by the hydrophone needle (red) can be analyzed using an oscilloscope. Please click here to view a larger version of this figure.
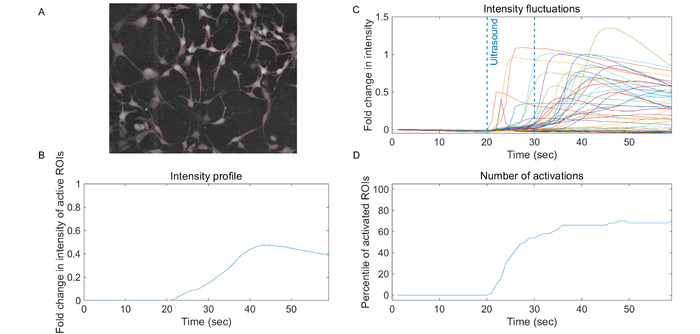
Figure 5: Example of LIPUS-induced calcium signals in human glioblastoma cells A-172. (A) Raw fluorescence image of A-172 cells grown on a polyester-bottom 35 mm culture dish and loaded with a cell-permeant version of the calcium-indicator Fluo-4. The red traces represent cell boundaries automatically identified by a computer program and labeled as regions of interest (ROI). (B) Time course of relative fluorescence change (Ft-F0/F0, or ΔF/F0) for each ROI during a LIPUS experiment. Images were acquired at a speed of 1 frame per second by a standard CCD camera and LIPUS was applied for 10 s between frames 20 and 30. The LIPUS waveform consists of 100 µsec pulses containing 400 cycles at 4 MHz and repeated every 10 ms for 10 s. (C) Plot showing the time course of the mean ΔF/F0 calculated for all ROIs (error bars not shown). (D) Plot showing the percentile of ROI exhibiting ΔF/F0 above a user-defined activation threshold. Please click here to view a larger version of this figure.
